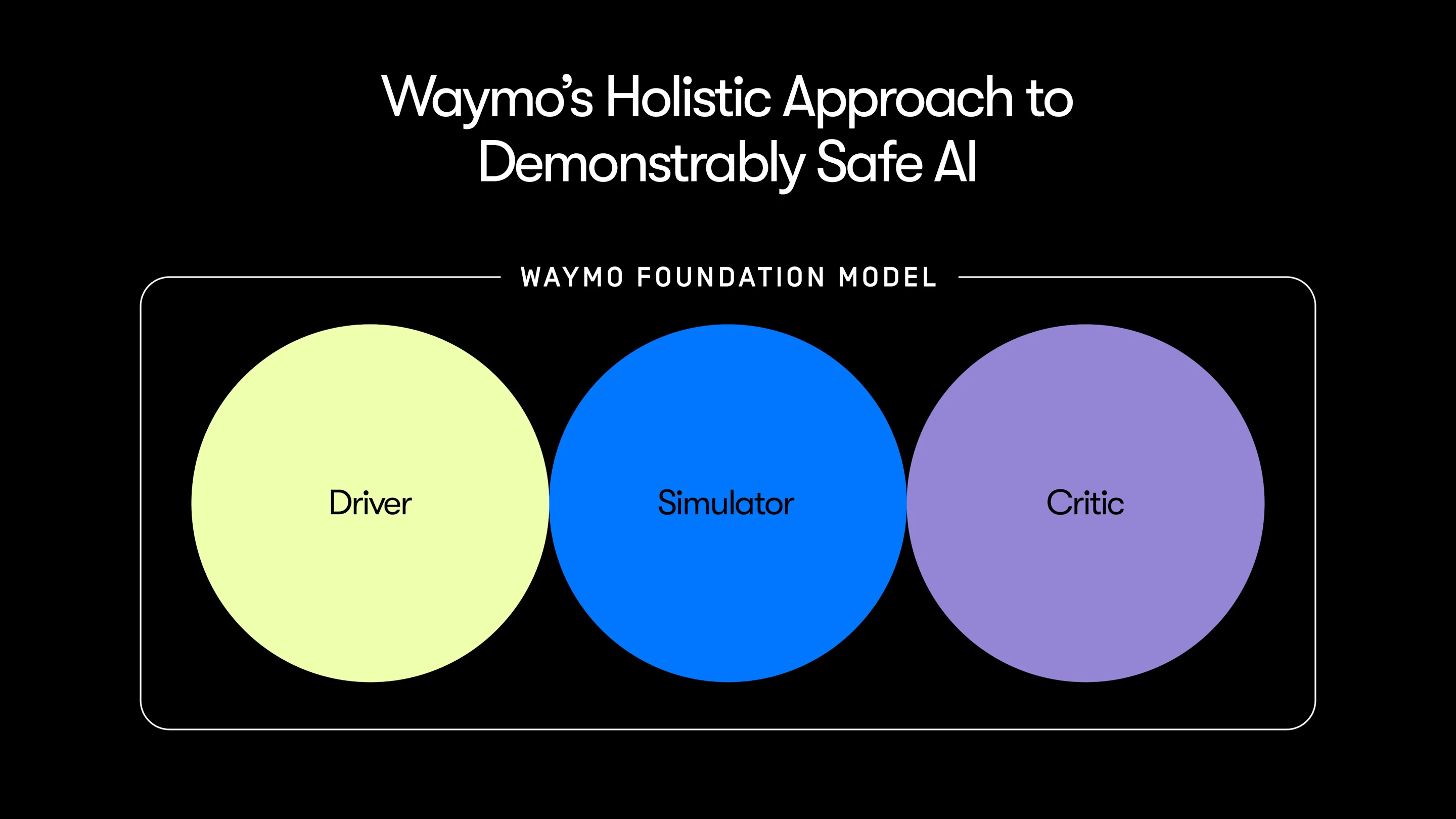
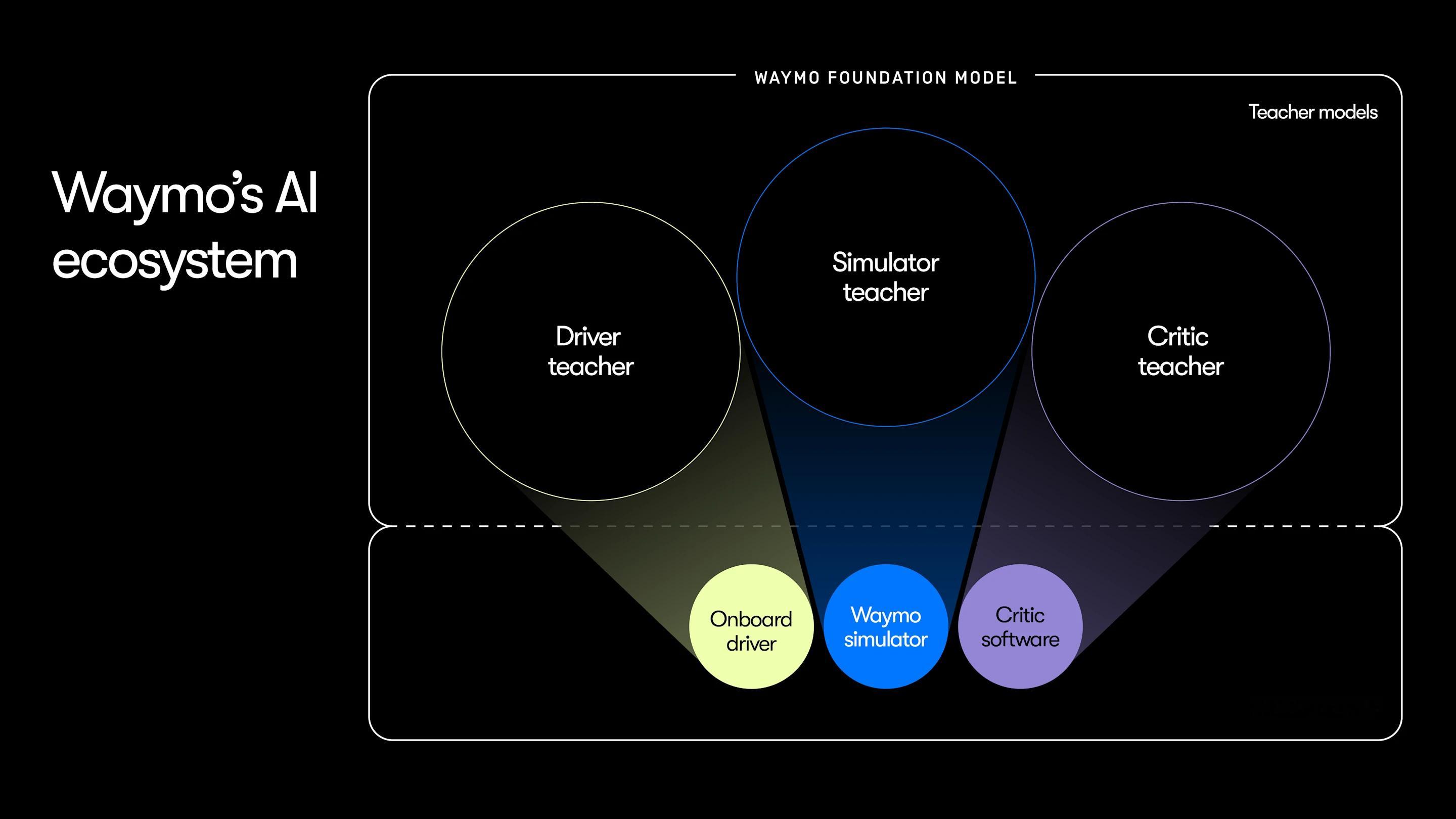
Waymo 终于出了一篇博客完整阐述其 AI 应用,作为沉淀了丰富规则的老牌、大佬级 Robotaxi 玩家,Waymo 系统的 AI 化也很有趣,符合预期。Waymo 对比同期的大部分 Robotaxi 玩家,属于在 AI 上走得非常快的,对比特斯拉 FSD,是一个保守派。Waymo 基于自己的基础模型 Waymo Foundation Model 开发了部署在车上的自动驾驶模型 Waymo Driver、让 Waymo Driver 跑在里面以进行训练的闭环的、逼真的仿真模型 Simulator,以及一个苛刻的评估模型 Critic。Waymo Foundation Model 是一个世界模型,但不是纯粹的端到端,当然也不会是过去的模块化系统。简单理解,这是一个分段式端到端,试图融合吸收端到端和模块化的优势。这个模型在训练过程中支持完整的端到端信号反向传播,说明模型内的模块和模块之间是通过向量传播的,可以全局训练优化。但 Waymo 要求模型输出对象、语义属性、道路属性等结构化信息,这是为什么?- 当 Driver 模型开错了,可以通过这些结构化信息准确判断模型错在哪了。方便安全验证。-仿真模型 Simulator 在生成仿真环境信息的时候,可以高效、符合物理规律且大规模的闭环仿真。- 评估模型 Critic 和强化学习通过这些结构化信息,可以设计一个清晰的奖励信号,让模型学习目标非常明确,性能更快的收敛。Waymo Foundation Model 的输入有系统一和系统二两个部分,系统一对应快思考,输入多传感器融合的信息,系统二是一个 VLM 模型,Waymo 用了 Gemini 模型训练这个 VLM 模型,以理解现实世界中罕见、新鲜或包含复杂语义信息的场景。系统一和系统二的输出都会给到下游,下游的世界模型再输出预测、高精地图、本车轨迹等信息。最后,Waymo 也会用大模型蒸馏小模型,但这里的细节在于,Waymo 连云端的仿真模型 Simulator,也是蒸馏而来的,可见基础模型的参数量规模应该是非常庞大的。另外,由于传感器路线原因,Waymo 的仿真模型 Simulator 还可以生成非常逼真的 LiDAR 点云。最后,Waymo 的一句话非常微妙:庞大的全自动驾驶(指主驾无人)经验是无可替代的。任何仿真、手动驾驶数据采集或测试员操作都无法复制 Waymo Driver 在全自动驾驶时遇到的各种状况和反应。全自动驾驶经验是否如此的不可替代?我觉得也未必。Waymo 这句话是一次性扫射了特斯拉、所有高阶 ADAS 玩家及所有 Robotaxi 玩家,因为在全自动驾驶里程这个指标上,目前没有人比他们更高。