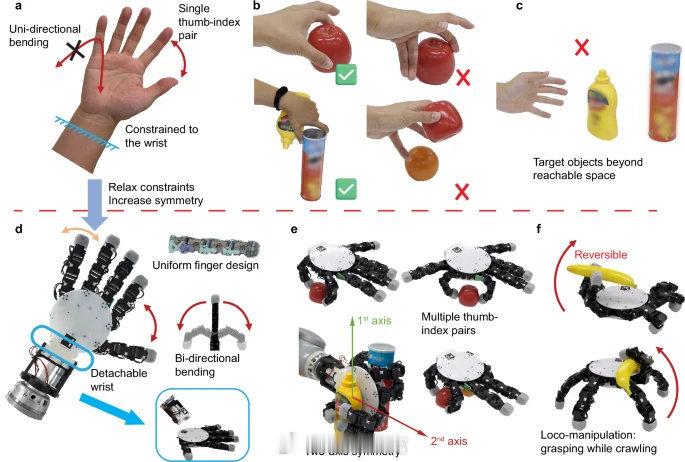
瑞士洛桑联邦理工学院研发出可脱离机械臂自主爬行的双面抓握机器人,能连续抓取多个物品,最大负载 2 公斤。对称设计使其能从正反两面抓取,有望用于工业自动化、仓储物流及灾难救援等场景。具身智能308_IO人形机器人
瑞士洛桑联邦理工学院研发出可脱离机械臂自主爬行的双面抓握机器人,能连续抓取多个物品,最大负载 2 公斤。对称设计使其能从正反两面抓取,有望用于工业自动化、仓储物流及灾难救援等场景。具身智能308_IO人形机器人
猜你喜欢

作者最新文章
热门分类
汽车TOP
汽车最新文章