来自能源的革命的雪球专栏
 标题
标题具身智能机器人技术 (Embodied Intelligent Robotics)
作者及单位邵宏(SHAO Hong)和谢大雄(XIE Daxiong),中兴通讯股份有限公司,中国深圳 518057。
摘要与关键词摘要:文章提出了一种具身智能机器人技术,用于智能制造领域。这种机器人能够主动感知环境、自主学习、自主决策,执行拟人化任务。其核心是强化学习智能体,配合多模态感知能力,实现实时控制。在中兴通讯5G智能制造工厂中,这种机器人被用来替代人工插拔5G小站产品的RJ45插头和光模块,显示出在智能制造中的巨大潜力。
关键词:具身智能(Embodied AI)、强化学习(Reinforcement Learning)、机器人(Robotic)、多模态感知(Multimodal Perception)。
研究背景在生产制造领域,尽管自动化程度提高,但仍有操作无法由传统工业机器人完成,如线缆插拔、光模块安装等。这些操作需要实时变化受力情况和运动轨迹,因此需要具身智能机器人技术来打通全自动化生产线的“断点”。
 系统模型
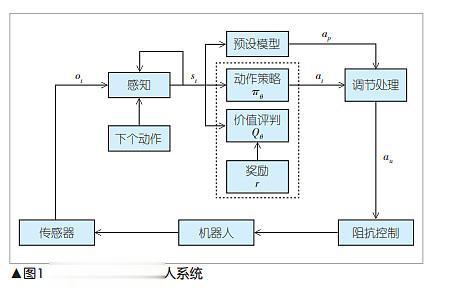
系统模型强化学习:具身智能机器人的“大脑”基于强化学习,通过与环境的交互实现主动感知与行动的反馈环。
部分可观测马尔可夫决策过程(POMDP):将机器人控制系统简化为POMDP,包含多模态感知状态空间、动作空间、观测状态转移概率、奖励函数和折扣系数。
马尔可夫决策过程(MDP):通过将POMDP转化为MDP,使用元组(S,A,p,r,γ)描述,寻找最佳决策以最大化累计折扣奖励。
 多模态感知神经网络结构
多模态感知神经网络结构双目视觉感知:使用双目视觉摄像头获取视觉信息。
末端六维力感知:通过装于机器人腕部的力反馈装置获取空间力感知数据。
本体状态感知:感知机器人本体状态数据。
神经网络设计:设计了多模态感知神经网络,包括本体状态信息自编码器、力反馈自编码器和图像编码器,以处理低维度和高维度的传感器数据。
控制器设计阻抗式PID控制器:设计了阻抗式PID控制器,将智能体输出的低带宽控制信号转换为高带宽的机器人控制指令。
控制力矩τu:通过雅可比矩阵和动力学模型,计算出末端期望位置,并输出控制力矩。
 系统仿真与真实环境测试
系统仿真与真实环境测试仿真模拟:在仿真环境中训练动作策略网络和价值评判网络,评估系统完成自动插拔任务的能力。
奖励设计:根据RJ45插头是否成功插入插口设置稀疏奖励,同时加入密集奖励部分。
真实生产环境测试:将训练后的模型应用于5G小站生产的器件插拔自动工位,由两台协作机器人组成,一台负责网线、光模块的插拔,另一台负责自动上下料。
 结束语
结束语具身智能机器人技术是数字世界融入现实世界的载体,将成为未来主流机器人技术之一。通过增加智能体大脑,传统机器人升级为能够在与环境互动中进行主动感知和学习的具身智能机器人。
作者介绍
邵宏:中兴通讯股份有限公司架构算法专家,从事具身智能机器人研究。
谢大雄:中兴通讯股份有限公司监事长,国家级领军人才,享受国务院特殊津贴。
这篇文章详细介绍了具身智能机器人技术的理论基础、系统模型、神经网络结构、控制器设计以及在实际生产环境中的应用和测试结果,展示了该技术在智能制造领域的应用潜力和前景。$中兴通讯(SZ000063)$ $赛力斯(SH601127)$ $中远海控(SH601919)$ #机器人# #万丰奥威# #拓斯达#
作者:能源的革命链接:https://xueqiu.com/7659667127/317997586来源:雪球著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。风险提示:本文所提到的观点仅代表个人的意见,所涉及标的不作推荐,据此买卖,风险自负。
