华为L3自动驾驶笔记(3):
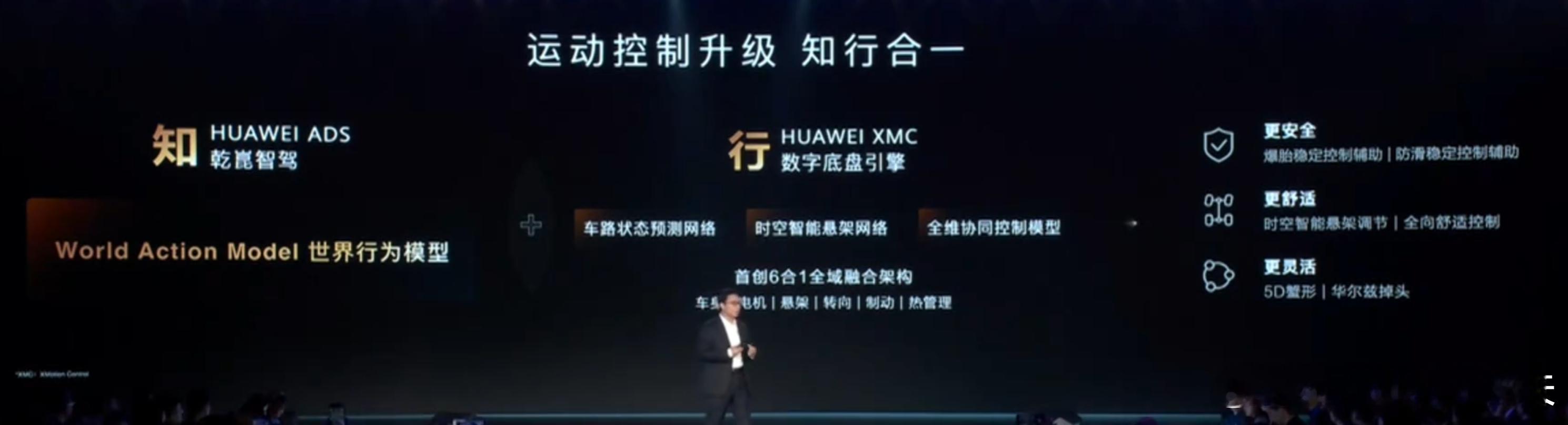
车端世界行为模型可以直接输出轨迹,直接控制车辆的行驶,基于6合一全域融合架构,车身-电机-悬架-转向-制动-热管理
ADS+XMC,可以感知路面信息,对交通进行时空推理(时间空间推理,之前还有猴子嘲讽这个命名,属实是逆天),对车身进行实时动态优化
华为L3自动驾驶笔记(3):
车端世界行为模型可以直接输出轨迹,直接控制车辆的行驶,基于6合一全域融合架构,车身-电机-悬架-转向-制动-热管理
ADS+XMC,可以感知路面信息,对交通进行时空推理(时间空间推理,之前还有猴子嘲讽这个命名,属实是逆天),对车身进行实时动态优化

作者最新文章
热门分类
汽车TOP
汽车最新文章