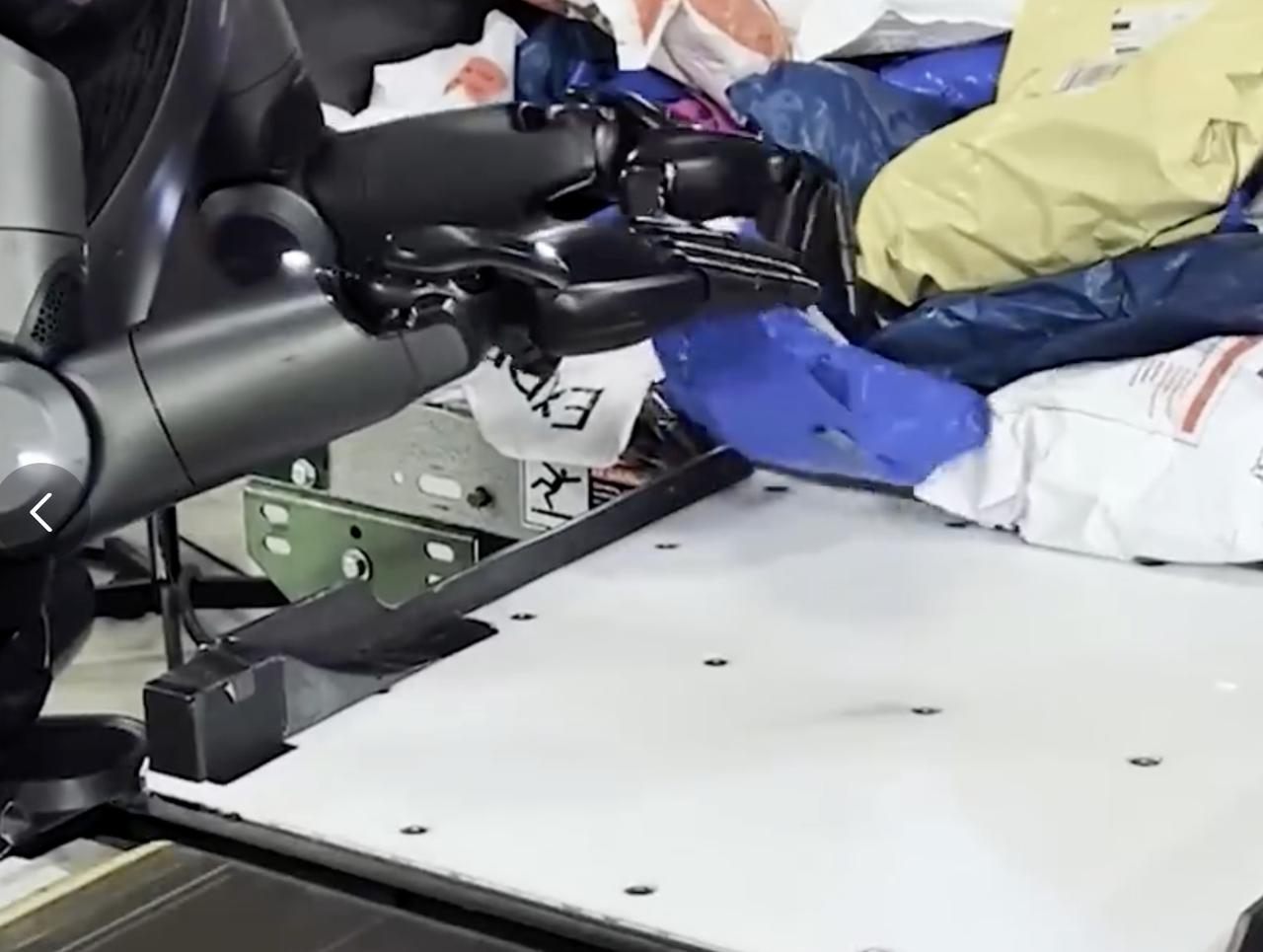
#机器人拣快递背后的技术细节##机器人快递分拣靠的是啥# Figure刚发布的人形机器人拣快递操作,核心问题就一个: 怎么让机器人像人一样“看、想、动”一气呵成? 这波提升,其实就是靠Helix系统的数据+模型架构两条线协同升级: 1. 记忆模块:让机器人“记得住” 传统机器人每次只能根据当前画面决定动作,而Helix现在加入了视觉记忆,能综合几秒内的连续图像,知道自己刚刚看过哪些面、抓过哪只包裹。 比如如果条码一开始没看清,它会“记得”曾在哪个角度瞄到过,主动旋转再确认,不再原地兜圈。 2. 动作历史:让操作更连贯 Helix不再是一步一处理,而是输入了一段最近的动作轨迹(手、躯干、头的位置等),在动作决策上形成连续性。 结果就是遇到包裹滑动、没抓稳,也能即时微调,不用重来,极大提高响应速度。 3. 力反馈:让“手感”更靠谱 Helix的输入状态里加入了力感知数据,当它手触到包裹、台面或被挤压时,神经网络会自动做出调整。 比如感到包裹压平了就不再下压,握住软包就轻点不挤破,这种“触感细节”对柔性物流特别关键。 4. 训练数据扩充:量变引发质变 实测发现,数据越多,模型越快越准:处理时间从6.84秒降到4.31秒,扫码正确率从88%涨到94%。 证明了这类机器人还在“低数据高收益区”,多喂数据很值。 5. Figure还做了个模块消融实验,发现: - 光靠视觉(不记忆、不反馈)会有很多误抓或重复操作; - 加上立体视觉后能看准深度,但还缺“时间感”; - 加上视觉记忆,能减少重复旋转,提升策略效率; - 最终加入状态历史和力反馈,才实现精准、高速、稳定。 也就是说,这不是“加点小功能”,而是多模块协作形成的新操作逻辑。 整体来看,这轮技术升级代表了一种趋势: 不靠预设规则、也不靠精细编程,而是通过端到端训练+神经模块增强,让机器人学会处理复杂现实场景。 这种思路未来也能迁移到其他场景,比如人–机协作、动态抓取、仓库搬运等任务。