研究人员一直在寻找新方法来提高步行机器人的灵活性、性能和效率。大多数时候,这种关注点都集中在电机改进上。但苏黎世联邦理工学院和马克斯普朗克智能系统研究所(MPI-IS)的一个团队专注于另一种方法——受动物生物学和人体解剖学启发的人造静电驱动肌肉。

过去几年,得益于电机技术和人工智能设计方面的进步,两足和四足机器人都变得相当灵活。然而,对于许多机器人来说,能源需求和成本仍然是一个主要障碍,尤其是当涉及到需要解释大量环境传感器数据的人工智能系统时。
为了避免这些问题,马克斯·普朗克ETH学习系统中心(CLS)的合作者正尝试模拟肢体的伸肌和屈肌,而无需使用直流电机或高性能人工智能程序。新设计不使用电动部件,而是使用类似于日常冷冻包的注油塑料袋。正如9月9日发表在《自然通讯》上的一篇论文所详述的那样,该团队的新型液压放大、自修复静电致动器(HASEL)可让原型“腿”轻松跳过不平坦的地形,同时快速适应,而不会产生与传统电机驱动选项一样多的热量。
为了实现这一功能,需要将由四个独立的导电油袋组成的两块“肌肉”的两侧部分覆盖电极贴片。然后,通过人工肌腱将肌肉连接到轻质碳纤维骨架上,该骨架具有3D打印的膝盖和髋关节。然后,当开始跳跃时,团队开始电击。
9月9日,博士生、研究报告共同第一作者Thomas Buchner在苏黎世联邦理工学院的附带声明中表示:“只要我们对电极施加电压,它们就会因静电而相互吸引。”
Buchner将这种电荷比作当你用气球摩擦头部时,头发会粘在气球上的情况。随着电压的增加,电极会彼此收缩得更近,将袋子里的油推向一侧,并在此过程中缩短其整体形状。就像动物或人类的腿一样,一块肌肉会随着另一块肌肉的伸长而缩短。
肌肉大小和形状的这些精确、快速的变化对于成功穿越环境至关重要。为了确定处理下方地形所需的适当电压,机械腿依靠专门设计的计算机代码来解释两个输入信号——一个用于伸展关节,另一个用于弯曲关节。每次跳跃后,腿部的关节都会根据下方表面的硬度或可塑性调整到适当的角度。
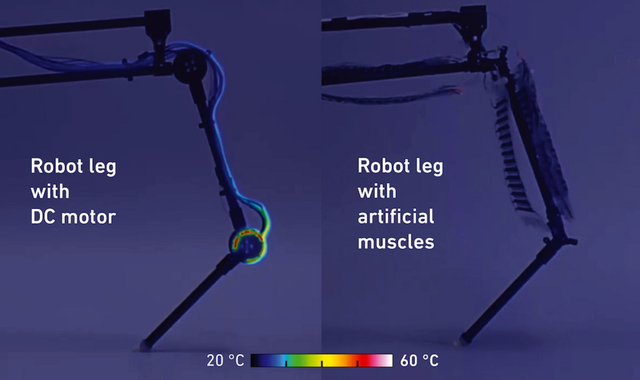
当机器人腿必须长时间保持某个姿势时,大量电流会流过驱动它们的直流电机(左)。随着时间的推移,能量会以热量的形式流失。相比之下,人造肌肉(右)采用静电原理工作,效率高,保持低温,因为在恒定负载下没有电流流过。
博士生兼共同第一作者福岛俊彦周一表示:“适应地形是一个关键方面。当一个人跳到空中落地时,他们不必提前考虑是否应该将膝盖弯曲90度或70度。”
相对简单的传感器和计算机编码的结合也意味着该团队的机器人腿比现有的电机驱动系统更节能。在产生不必要的热量方面尤其如此。使用热成像,直流电机驱动的腿的线路产生的温度接近100华氏度。与此同时,HASEL设计几乎不产生多余的热量。与使用直流电机的控制腿相比,HASEL驱动的肢体所需的能量也仅为电动电磁设计的1.2%。据福岛称,这意味着他们的系统不需要与电机驱动机器人相同的热量管理工具,例如散热器或风扇。
然而,目前,肌肉驱动的肢体需要固定在其小的圆形轨道上。尽管在团队测试不受束缚的版本之前,还需要做更多的工作和改进,但研究人员相信,这种节能和简化的设计有朝一日可能会被应用到四足和双足机器人上,与今天的机动机器相媲美,甚至超越它们。
