我们最近收到了 F-4 战斗机的姿态指示器,该仪器 使用旋转的球来显示飞机的方向和方向。在普通飞机中,人工地平线显示两个轴(俯仰和滚动)的方向,但 F-4 指示器 使用旋转球显示三个轴的方向,并添加方位角 (偏转)。1 我并不清楚球是如何在三个轴上旋转的:它怎么能向各个方向旋转并且仍然保持 附着在乐器上?

姿态指示器。“W” 形成一架程式化的飞机。在这种情况下,它表示飞机正在轻微爬升。照片来自 CuriousMarc。
我们拆解了指示器,对其 1960 年代的电路进行了逆向工程,修复了一些问题,2 和 让它旋转起来。下面的视频剪辑显示了围绕三个轴旋转的指标。在这篇博文中,我讨论了该指标的机械和电气结构。(快速解释一下,球实际上是两个空心的半壳,连接到“两极”处的内部机构;壳体旋转,而“赤道”保持静止。
F-4 飞机该指示器用于 F-4 Phantom II3,因此飞行员可以在高速机动期间跟踪飞机的方向。F-4 是 1958 年至 1981 年制造的超音速战斗机。生产了 5000 多架,使其成为有史以来产量最高的美国超音速飞机。它是越南战争中美国的主要战斗机,在航空母舰上作战。F-4 在 1990 年代海湾战争期间仍在使用, 在“Wild Weasel”角色中压制防空系统。F-4 能够携带核弹。4

一架 F-4G 幻影 II 野鼬飞机。来自国家档案馆。
F-4 是一架双座飞机,由雷达拦截官控制雷达和武器 从飞行员后面的座位上。两个驾驶舱都有一个塞满仪器的面板,侧面有额外的仪器和控制装置。如下图所示,飞行员面板的三轴姿态指示器位于中央位置,就在微红色雷达瞄准镜的下方,反映了它的重要性。5(后座舱有一个更简单的两轴姿态指示器。
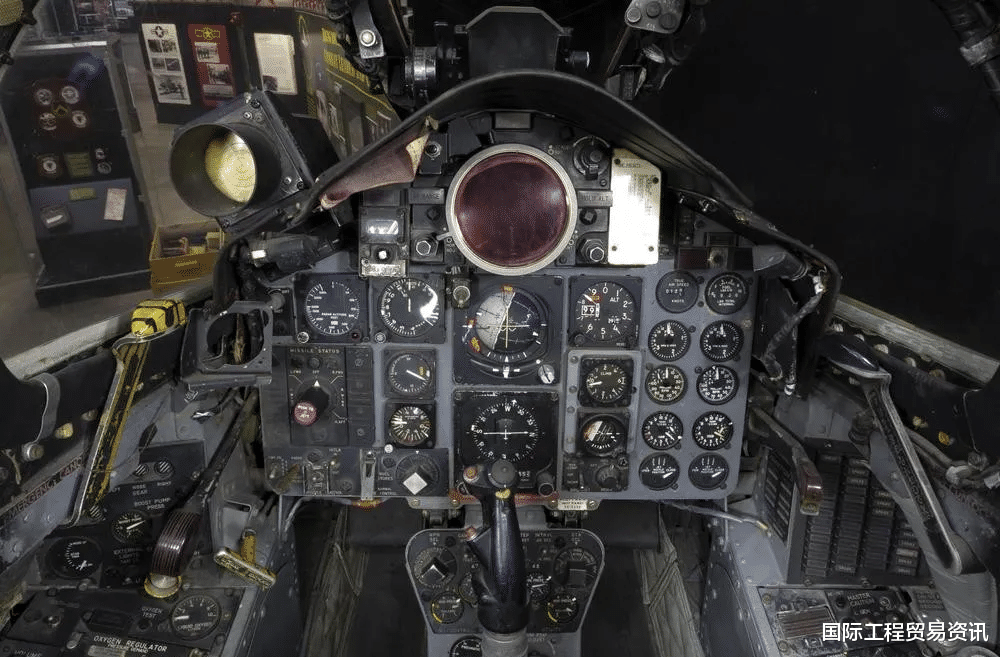
F-4C Phantom II 的驾驶舱,姿态指示器位于面板中央。点击此照片(或任何其他照片)查看大图。照片来自美国空军国家博物馆。
姿态指示器机构指示器内的球在三个轴上显示飞机的位置。如果飞机沿其飞行轴左右滚动,则滚转轴指示飞机的角度。俯仰轴指示飞机向上或向下倾斜的角度。最后,方位轴表示飞机的罗盘方向, 由飞机的左转或右转 (偏航) 改变。该指标还具有移动指针和状态标志,但在这篇文章中,我将重点放在 在旋转的球上。6
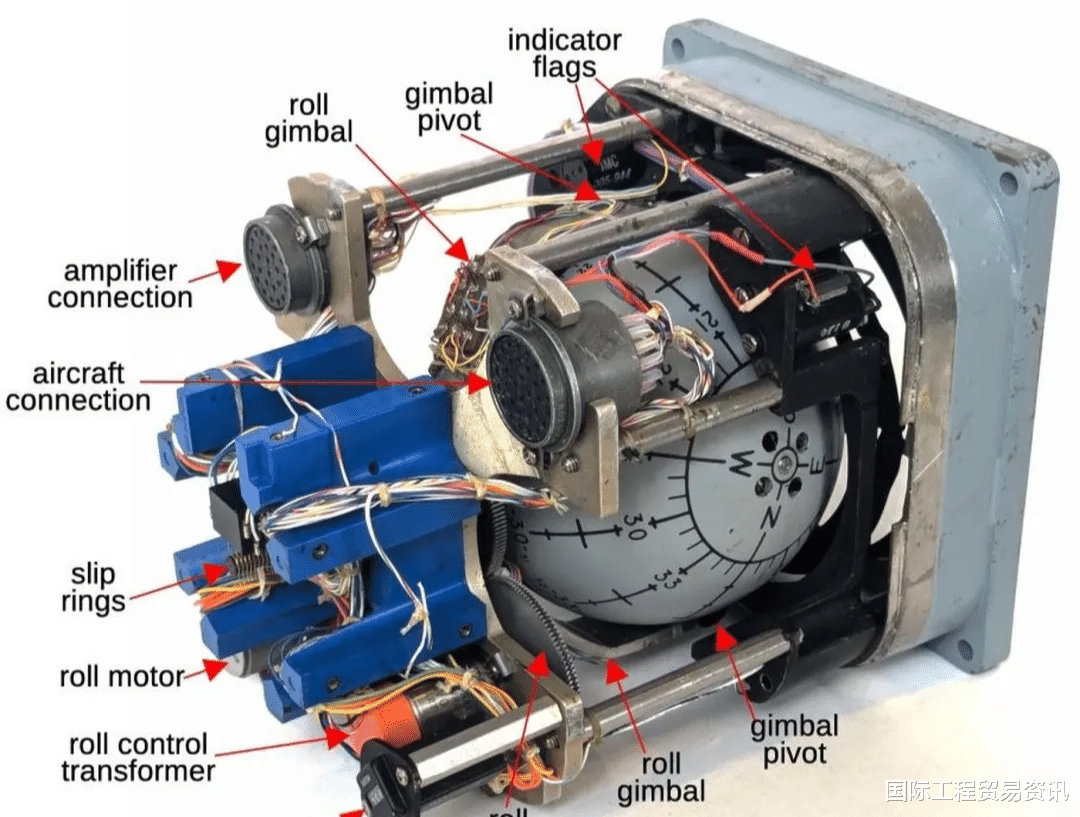
该指标使用三个电机来移动球。横滚电机(下图)连接到指示器的框架上,而俯仰和方位电机则 球内。滚珠由滚轮万向节固定到位,滚轮万向节连接到顶部的滚珠机构 和底部枢轴点。滚动电机转动滚动万向节,从而转动球,提供顺时针/逆时针 运动。滚动控制变压器提供位置反馈。请注意滚动万向节上的许多电线,这些电线连接到球内部的机构。
取下盖子的姿态指示器。
下图显示了移除半球形后球内部的机构 球的外壳。当横滚云台旋转时,该机构会随之旋转。变桨电机使整个机构围绕沿“赤道”连接的变桨轴(此处为水平)旋转。方位电机和控制变压器位于变桨组件后面,在这张照片中不可见。方位电机转动垂直轴。球的两个空心半球连接到杆身的顶部和底部。因此,方位电机绕方位轴旋转球壳,而机构本身 保持静止。
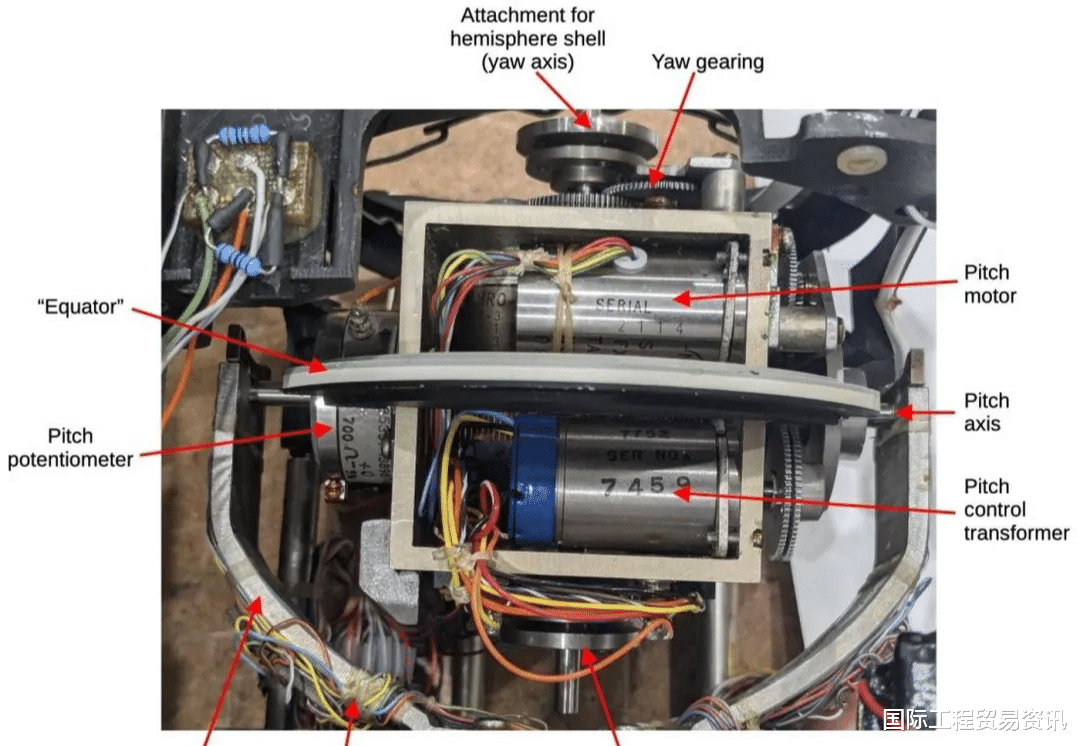
The components of the ball mechanism.
Why doesn't the wiring get tangled up as the ball rotates? The solution is two sets of slip rings to implement the electrical connections. The photo below shows the first slip ring assembly, which handles rotation around the roll axis. These slip rings connect the stationary part of the instrument to the rotating roll gimbal. The black base and the vertical wires are attached to the instrument, while the striped shaft in the middle rotates with the ball assembly housing. Inside the shaft, wires go from the circular metal contacts to the roll gimbal.
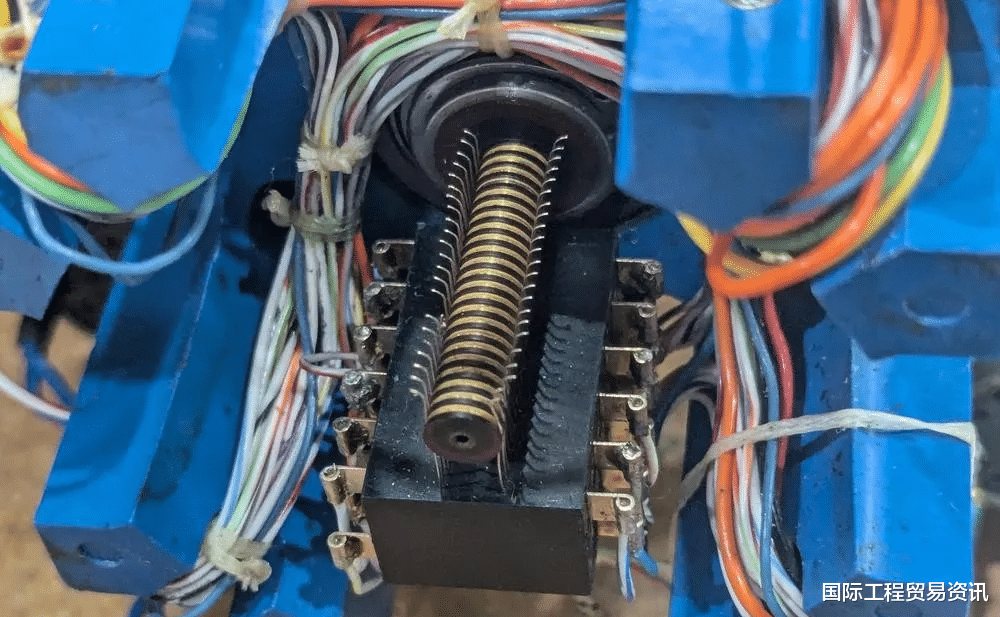
The first set of slip rings. Yes, there is damage on one of the slip ring contacts.
球内部有第二组滑环 提供 滚动万向节和滚珠机构上的接线。下图显示了这些滑环的连接,处理旋转 俯仰轴(本照片中为水平)。(滑环本身在里面,不可见。从组件中伸出的轴绕方位角 (yaw) 轴旋转。球半球连接到金属盘上。方位轴不需要滑环,因为只有球壳旋转;电子设备保持静止。

第二组滑环的连接。
伺服回路在本节中,我将解释伺服回路如何控制电机。姿态指示器由外部陀螺仪驱动,接收指示滚转、俯仰和方位角位置的电信号。与 1960 年代航空电子设备中的常见情况一样,信号是从同步器传输的,同步器使用三根线来指示角度。姿态指示器内部的电机旋转,直到指示器的三个轴角度与输入角度匹配。
每个电机都由一个伺服回路控制,如下所示。目标是将输出轴旋转到与输入角度完全匹配的角度。由三根同步线指定。关键是一个叫做控制变压器的装置,它采用三线输入角和物理轴旋转,并且 生成一个误差信号,指示所需角度和物理角度之间的差异。放大器沿适当的方向驱动电机,直到误差信号降至零。为了改善伺服回路的动态响应,转速计信号用作负反馈电压。这可确保电机在系统接近正确位置时减速,因此电机不会超过位置并振荡。(这有点像 PID 控制器。

此图显示了伺服回路的结构,其中反馈回路确保输出轴的旋转角度与输入角度相匹配。
更详细地说,外部陀螺仪单元包含同步发射器,这是一种转换轴角度位置的小型设备 转换为三根电线上的 AC 信号。下图显示了典型的同步器,输入轴位于顶部,有五根电线 在底部:2 个用于电源,3 个用于输出。

同步发射器。
在内部,同步器有一个称为转子的旋转绕组,由 400 Hz AC 驱动。三个固定定子绕组提供三个交流输出信号。当轴旋转时,的相位和电压 output 信号发生变化,指示角度。(Synchros 可能看起来很奇怪,但它们在 1950 年代和 1960 年代被广泛使用 在船舶和飞机中传输角度信息。
同步发射器或接收器的原理图符号。
姿态指示器使用控制变压器来处理这些输入信号。控制变压器在外观和结构上与同步变压器相似,但接线方式不同。三个定子绕组接收输入,转子绕组提供误差输出。如果同步发射器和控制变压器的转子角度相同,则信号会相互抵消,并且 无错误输出。但随着两个轴角之间的差异增大,转子绕组会产生误差信号。阶段 error 信号指示错误的方向。
下一个组件是电机/转速表,这是一种经常用于航空电子伺服回路的特殊电机。这种电机比普通电动机更复杂。电机由 115 伏交流电、400 赫兹供电,但这不足以让电机旋转。该电机还具有两个低压交流控制绕组。给控制绕组通电将导致 电机向一个方向或另一个方向旋转。
电机/转速计单元还包含一个转速计,用于测量其转速,用于反馈回路。转速计由另一个 115 伏交流绕组驱动,并产生与转速成正比的低压交流信号 的电机。
电机/转速计与姿态指示器中的电机/转速计相似(但不相同)。
上图显示了拆下转子的电机/转速计。由于该装置有多个绕组,因此有许多电线。转子有两个滚筒。左侧带有螺旋条纹的滚筒用于电机。这个滚筒是“鼠笼式转子”, 它由于感应电流而旋转。(转子没有电气连接;滚筒通过磁场与绕组相互作用。右侧的滚筒是转速计转子;它在输出绕组中感应出一个与涡流引起的速度成正比的信号。转速计信号与驱动信号一样为 400 Hz,同相或 180º 异相,具体取决于方向 的旋转。有关电动机/发电机如何工作的更多信息,请参阅我的拆解。
放大器电机由一个放大器组件提供动力,该组件包含三个独立的误差放大器 每个轴一个。我不得不对放大器组件进行逆向工程,以使指示器正常工作。该组件安装在姿态指示器的背面,并连接到其中一个 指示器的圆形连接器。请注意放大器组件左下角的切口,以 提供对指示器背面第二个连接器的访问。飞行器通过 第二个连接器和指示器将输入信号传递给放大器 如上所示的连接器。
放大器组件。
放大器组件包含三个放大器板(用于滚动、俯仰和方位角), 直流电源板、交流变压器、 和一个微调电位器。7 下图显示了安装在仪器背面的放大器组件。在左侧,交流变压器产生电机控制电压并为电源板供电。垂直安装在右侧。该组件有三个相同的放大器板;已卸下 Middle Board 以显示组件。放大器通过变压器下方的圆形连接器连接到仪器。左上角的圆形连接器位于仪器外壳上(不是放大器),并提供 飞机和仪器。8
安装在仪器背面的放大器组件。我们将测试信号馈送到左上角的连接器。
下图显示了三个放大器板中的一个。结构很不寻常,一些组件堆叠在上面 其他组件以节省空间。一些元件引线很长,并用透明塑料套管保护。该板通过一束点对点电线连接到放大器组件的其余部分,如左侧所示。中间的圆形脉冲变压器有五根五颜六色的电线从中伸出。右侧是驱动电机控制绕组的两个晶体管,它们之间有两个电容器。晶体管安装在散热器上,散热器拧到放大器组件的外壳上以进行冷却。电路板上覆盖有保形涂层,以保护其免受潮湿或污染物的影响。
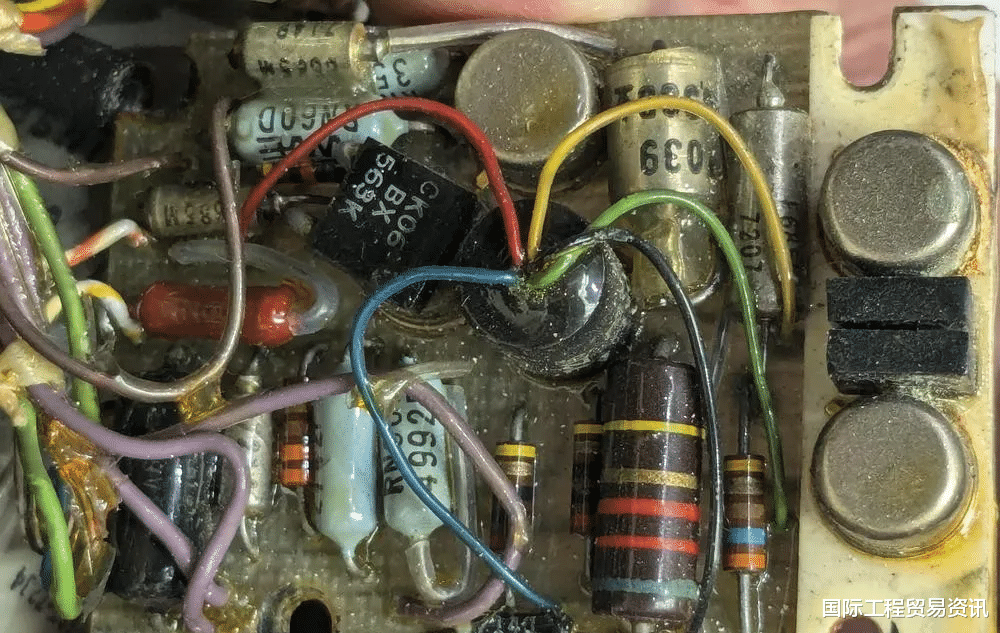
三个放大器板之一。
每个放大器板的功能是产生两个控制信号,使电机向适当的方向旋转 基于馈入放大器的误差信号。放大器还使用电机单元的转速计输出,在误差信号减小时减慢电机速度,从而防止 过头。放大器的输入是 400 赫兹交流信号,相位表示正或负误差。输出驱动电机的两个控制绕组,确定电机的旋转方向。
放大器板的原理图如下。左侧的两个晶体管放大误差和转速计信号,驱动脉冲变压器。脉冲变压器的输出将具有相反的相位,驱动输出晶体管的两半 400 Hz 周期。其中一个晶体管将处于正确的相位以打开并将电机控制交流电拉至地,而另一个晶体管将处于正确的相位 transistor 将处于错误的相位。因此,适当的控制绕组将被激活(半个周期),使电机沿所需方向旋转。
三个放大器板之一的原理图。(点击查看大图。
事实证明,有两个版本的姿态指示器使用不兼容的放大器。我认为较新指示器的电机只有一个控制绕组,而不是两个。幸运的是,连接器的键控方式不同,因此您不会连接错误的放大器。第二个放大器(下图)看起来稍微现代一些(1980 年代),带有双面电路板和更多组件代替 脉冲变压器。
第二种类型的放大器板。
俯仰调整电路姿态指示器在右下角有一个音高微调旋钮,尽管我们的旋钮不见。事实证明,音高微调相当复杂。在水平飞行中,飞机的机头可能会略微向上或向下倾斜,以达到所需的迎角。飞行员希望姿态指示器显示水平飞行,即使飞机略微倾斜,因此指示器可以 使用 Pitch Trim 旋钮进行调整。然而,问题在于,例如,战斗机可能会进行垂直 90º 爬升。在这种情况下,姿态指示器 应显示实际姿态,并忽略 Pitch Trim 调整。
我找到了一项 1957 年的专利,解释了这是如何实现的。解决方案是在飞机远离水平飞行时“淡出”配平调整。这是通过一个由俯仰角控制的特殊多区电位计实现的。
下面的原理图显示了如何从特殊的俯仰角电位计和 飞行员的俯仰配平调整。与姿态指示器中的大多数信号一样,俯仰配平是 400 Hz 交流信号,相位表示正或 阴性。暂时忽略俯仰角,进入变压器的驱动信号将为 AC。变压器的分离绕组将产生正相和负相信号。调整音高 配平电位器允许飞行员将配平信号从正到零再到负,将所需的校正应用于 指标。
俯仰配平电路。基于专利。
现在,看看复数俯仰角电位计。它具有交替的电阻段和导电段,AC 馈入相反的 双方。(请注意,+AC 和 -AC 指的是相位,而不是电压。由于电阻相等,交流信号将在顶部和底部相互抵消,在这些段上产生 0 伏特。如果飞机大致水平,电位计雨刷器将拾取正相 AC 并将其馈入 transformer,如前所述提供所需的微调调整。但是,如果飞机几乎垂直爬升,雨刮器将接收到 0 伏信号,因此不会有 音高微调。对于介于两者之间的角度范围,电位计的电阻将导致音高微调信号平滑地淡出。同样,如果飞机正在急剧俯冲,雨刮器将在底部接收 0 信号,从而取消俯仰配平。如果飞机倒置,雨刮器将拾取负交流相位,导致俯仰配平调整 以相反的方向应用。
结论姿态指示器是任何飞机的关键工具,在以下情况下尤其重要 在能见度低的情况下飞行。F-4 的姿态指示器超出了典型的人工水平指示器 飞机,添加第三个轴以显示飞机的航向。不过,支持第三个轴会使仪器变得更加复杂。查看指示器内部,可以发现球如何在保持静止的同时在三个轴上旋转 牢固地附着。
现代战斗机避免使用复杂的机电仪器。相反,他们 提供一个“玻璃驾驶舱”,其中大部分数据在屏幕上以数字方式提供。例如,F-35 的控制台用宽大的全景触摸屏取代了所有仪表,显示 所需颜色信息。尽管如此,机械乐器尽管不实用,但具有特殊的魅力。
欲了解更多信息,请关注我 Mastodon 为 @kenshirriff@oldbytes.space 或 RSS。(我已经放弃了 Twitter。我与 CuriousMarc 和 Eric Schlapfer 一起参与了这个项目,因此期待一个 视频。感谢 John Pumpkinhead 和另一位收集者提供指标 和放大器。
注释和参考资料规格9
这种三轴姿态指示器在许多方面与阿波罗太空飞行中使用的 FDAI(飞行指引仪姿态指示器)相似,尽管 FDAI 有更多的指示器和指针。它比用于导航(拆卸)的 Soyus Globus 更复杂,后者在两个轴上旋转。也许有人会借给我们一个 FDAI 来检查......↩
我们的指示器已被用作零件来源,因为它内部有剪断的电线和 缺少音高微调旋钮、几个指针和内部 调节电位计。我们不得不更换电源中的两个故障电容器。在某处还有一个短 我们正在追踪;它一度导致晶体管内部的键合线熔化(!↩
这架飞机是“幻影 II”,因为最初的幻影是第二次世界大战 战斗机,麦克唐纳 FH 幻影。麦克唐纳道格拉斯 (McDonnell Douglas) 为 F-4 重复使用了幻影 (Phantom) 的名称。(McDonnell 在 1967 年与 Douglas Aircraft 合并后更名为 McDonnell Douglas。麦克唐纳道格拉斯于 1997 年并入波音公司。 许多人将波音目前的问题归咎于这次合并。↩
F-4 可以携带各种核弹,例如 B28EX、B61、B43 和 B57, 被称为“特殊武器”。下图显示了核储存同意开关,该开关为 释放。(不知何故,我期待着一个更复杂的核弹机制。开关标签位于阴影中,但显示 “REL/ARM”、“SAFE” 和 “REL”。F-4 武器交付手册讨论了 这个开关简短地。

核仓库同意开关,位于后驾驶舱武器系统官员的右侧。照片来自美国空军国家博物馆。
↩
下图是 F-4 驾驶舱姿态指示器的特写。请注意左上角的 Primary/Standby 切换开关。奇怪的是,这个开关只是拧在控制台上,电线裸露。根据其他来源,这似乎是标准安装。此开关是“参考系统选择器开关”,用于为指示器选择数据源。在主要设置中,陀螺稳定惯性导航系统 (INS) 提供信息。INS 通常从磁罗盘获取方位角信息,但可以使用 定向陀螺仪(如果地球磁场失真,例如在极地地区)。有关详细信息,请参阅 F-4E 飞行手册。

F-4 幻影 II 驾驶舱中的指示器特写。照片来自美国空军国家博物馆。
待机开关设置使用轰炸计算机(AN/AJB-7 姿态参考轰炸计算机组)作为信息源;它有两个独立的陀螺仪。如果主姿态指示器完全失效,备用是“紧急姿态参考系统”、一个独立的陀螺仪和 主姿态指示器下方和右侧的指示器;请参阅前面的驾驶舱照片。↩
下图显示了该指标的功能。

姿态导向指示器 (ADI) 的功能。从 F-4E 飞行手册到 1F-4E-1。
俯仰转向杆用于仪表 (ILS) 着陆。倾斜方向盘杆提供来自导航系统的所需航线的转向信息。↩
例如,滚动、俯仰和方位角输入需要不同的阻力来处理 PITCH TRIM 输入。这些电阻器位于电源板上,而不是 放大器板。这使得三个 amplifier 板是相同的,而不是 amplifier 板略有不同 每个轴。↩
姿态指示器组件有一个圆形的军用规格连接器,外壳有一个直通连接器。也就是说,飞机接线插入外壳外部,指示器内部插入外壳内部 箱。外壳外部的引脚号与内部连接器上的引脚号不匹配,这非常 对系统进行逆向工程时很烦人。↩
在本脚注中,我将链接到一些相关的军事规范。
姿态指示器在军用规范 MIL-I-27619 中指定,该规范涵盖三个类似的指示器,称为 ARU-11/A、ARU-21/A 和 ARU-31/A。这三个指示器几乎相同,除了 ARU-21/A 有水平指针 alarm 标志和 ARU-31/A 在 指示器,以及左下角的 Bank Angle 命令指针调节旋钮。ARU-11/A 用于 F-111A。(ID-1144/AJB-7 指示器可能与 ARU-11/A 相同。ARU-21/A 用于 A-7D 海盗船。ARU-31/A 用于 F-4 的侦察版 RF-4C Phantom II。下图显示了 RF-4C 的驾驶舱;请注意,在 面板中心有两个旋钮。

RF-4C 的驾驶舱面板。照片来自美国空军国家博物馆。
指标是一部分 的 AN/ASN-55 姿态航向参考集,在 MIL-A-38329 中指定。我认为该指标最初是从 MD-1 陀螺仪接收信息的 (MIL-G-25597) 和 ML-1 磁通阀指南针,但我还没有找到所有的修订版和变体。
规范 MIL-I-23524 描述 一个与 ARU-21/A 几乎相同但带有白旗的指示器。该指示器也用于 AJB-3A 炸弹释放计算装置,这是 A-4 天鹰的一部分。该指示器与集成飞行信息系统 MIL-S-23535 一起使用,该系统包含飞行指引计算机 MIL-S-23367。
我的指示器没有识别标记,因此我无法确定其确切型号。此外,它缺少组件,因此很难匹配功能。由于我的指示器有白旗,因此可能是 ID-1329/A。

SS
还硏究鬼怪?全球也没多少架在飞了吧?😂
用户14xxx59
不明觉厉
用户12xxx29
好家伙,连F-4的后勤备件都开始来中国采购了?[得瑟][得瑟]土耳其还是伊朗?
秋天的回忆
现在一个显示器完事😂
qzuser
当时人的脑洞真是大开[点赞]
陈仙应
[赞][赞][赞][赞][赞][赞][赞][赞][赞][赞][赞][赞][赞]
煤球
这算是解密了?[呲牙笑]