最近,国内研究团队开发了一种创新性的类蚯蚓机器人导航系统,融合了IMU和零速更新技术,旨在深入研究并有效评估类蚯蚓机器人在不同地形下的精确导航能力。
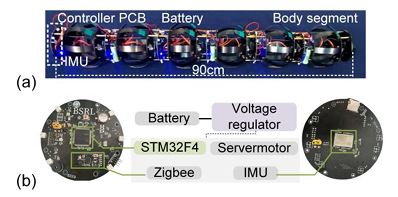
研究员将IMU传感器固定在类蚯蚓机器人身体上,用来监测并记录机器人在移动过程中的加速度和角速度变化情况。经实验结果验证,IMU传感器可以捕捉到机器人在不同地形上的运动轨迹,即使在复杂和变化的环境中IMU传感器也能保持较高的监测精度。


实验表明,地形对于IMU传感器的精度监测影响忽略不计,即使在复杂和变化的环境中。这说明IMU传感器在精确导航类蚯蚓机器人方面扮演着重要角色,,为研发更为精准有效的机器人控制方案提供支持。

