报告出品方:长城证券
以下为报告原文节选
------
1. 执行器:人形机器人硬件系统关键部件
1.1 兼具精度和成本优势,电动执行器是首选动力方式
执行器(Actuator)是根据给定信号与阀门位置反馈量之间的偏差,通过微型控制电机运行,通过变速及执行机构输出位置,实现对阀门的自动调节。人形机器人关节执行器,也称为一体化关节,是机器人的关键部件,其技术水平直接影响人形机器人的发展。

根据动力来源的不同,执行器可分为液压、气动、电机等。由于电机驱动方式具有成本低、控制精度高、密闭性好等特点,人形机器人执行器一般采用该驱动方式。
气压驱动:常见于点到点的控制。随着气动肌肉和气压伺服技术的发展,气压驱动逐渐被应用到人形机器人中。但是空气的可压缩性和延迟特性使得气压驱动方式难以实现精准控制,此外还具有能量效率低、气压出力小等缺点,故目前使用较少。

液压驱动:不需要采用减速装置,驱动结构简单;同时还具备输出力大、功率重量比高的优点,故被用作早期阶段人形机器人的主要动力来源。美国波士顿动力公司发布的 Petman 和 Atlas 均采用液压驱动方式。但是液压驱动精度较低,制造和维修成本高,目前无法满足大规模商业化的需要,故逐步被电机驱动方式所替代。


电机驱动:具有控制精度高、成本低等优势,是服务机器人、人形机器人首选动力方式。但是电机驱动的功率密度不如液压驱动,在应用中往往需要搭配减速装置,增大了回程间隙等误差;同时也较难适应大负载、野外等场景。未来的发展方向主要是提高驱动系统的负载能力和柔性,使其能够适应多元应用场景需求。

1.2 刚性执行器是主流方案,准直驱执行器前景广阔
人形机器人电动执行器的研究和应用始于 20 世纪 70 年代,技术迭代主要围绕结构设计、减速器、控制方式等方面。结构设计上,执行器结构设计经历了从独立设计到和整机融合的发展,技术层面经历了从刚性到弹性,再到准直驱的发展,集成度逐步提升。减速器上,执行器用减速器经历了从大传动比到小传动比的演变,制造难度逐步降低。控制方式上,执行器控制方式经历了从位置控制到力位混合控制和阻抗控制的演变,控制精度逐步提升、能量损耗逐步降低。
刚性执行器(Traditional Stiffness Actuator):1983 年早稻田大学研究的 WL-10R机器人使用刚性执行器 TSA,自此人形机器人开始广泛应用刚性执行器为关节动力源。该方案控制精度高、技术成熟,目前也是人形机器人执行器的主流方案。
弹性执行器(Series Elastic Actuator):1995 年麻省理工学院的 Pratt 等人提出了弹性执行器 SEA 的概念,拉开了弹性驱动器研究的序幕。美国宇航局的机器人 Valkyrie和意大利技术研究院的机器人 Walk-Man 都使用了弹性驱动器。
准直驱执行器(Proprioceptive Actuator):2016 年 Wensing 等提出了准直驱执行器PA 的概念,并将其应用于四足机器人 Cheetah 和双足机器人 Hermes,准直驱执行器是最近几年研究的热点。

1.2.1 刚性执行器:控制精度高,能量效率低
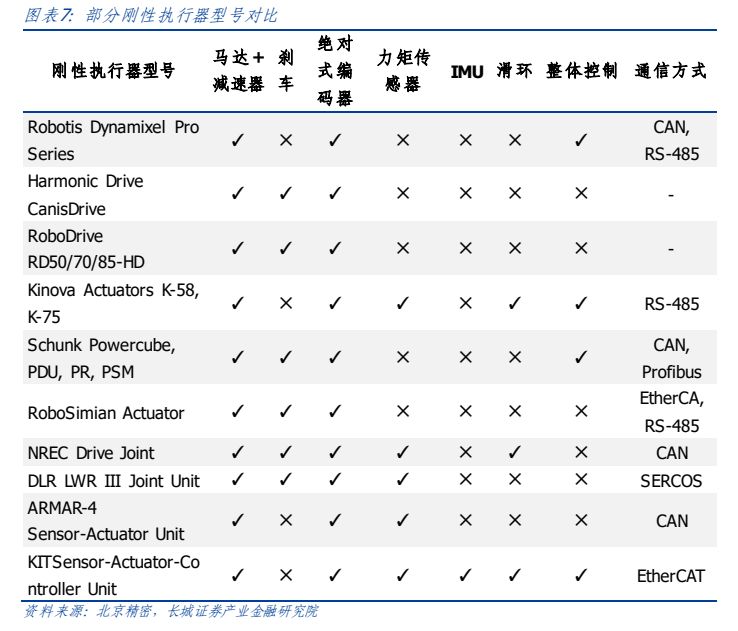
刚性执行器主要由电机、高传动比减速器、编码器、力矩传感器和控制板等组成,力矩传感器是可选器件。根据《双足机器人腿部及其驱动器的设计理论与关键技术研究》一文,Lola、SDR、Dynamixel Pro Series 等机器人的执行器采用该方案。它们在电机上,多选择无刷电机;在减速器上,绝大多数刚性执行器方案采用谐波减速器、少部分采用摆线针轮减速器;在编码器上,几乎都采用绝对式编码器。
目前刚性执行器结构设计基本定型,前瞻研究主要集中在电机和减速器等零部件的整体优化设计上。从实际应用来看,刚性执行器具备控制精度高、稳定性好等特点,成为主流方案。但是受限于元器件工艺和原理,传统刚性执行器的功率密度很难达到生物肌肉的水平 500 W/kg,同时也解决不了机器人受外部冲击时零部件强度问题,故很难适配大负载、高运动强度的关节部位。


1.2.2 弹性执行器:功率调制好,控制方式相对复杂
弹性执行器主要借鉴 Hill 肌肉三元素力学模型,通过模拟动物利用骨骼肌肉系统在运动过程中储存和释放能量的过程,使得执行器表现出柔顺、安全和高能量效率特性。从结构上看,弹性执行器在刚性执行器基础上增加了弹性元件。根据弹性元件原理和结构设计的不同,目前市面上主要有串联弹性执行器、并联弹性执行器、离合式弹性执行器和多模态弹性执行器几类产品。
串联弹性执行器 SEA(Series Elastic Actuator):是在刚性执行器的驱动元件和负载间增加弹性单元,从而具有缓冲机器人触地冲击和缓解外部碰撞冲击的作用,同时还可以储存能量。但是由于弹性元件引入,系统变为欠驱动系统,运动控制精度较低。
并联弹性执行器 PEA(Parallel Elastic Actuator):弹性元件的连接方式由串联改变为并联。相对传统刚性执行器,此方案可以显著提高输出功率,降低能量损耗。根据《双足机器人腿部及其驱动器的设计理论与关键技术研究》一文,在实现平滑轨迹跟踪,尤其是在稳定性和对冲击的鲁棒性(在受冲击时仍能保持正常工作的能力)方面,机器人手部引入此方案具有优势。
离合式弹性执行器 CEA(Clutched Elastic Actuator):是在弹性元件位置增加离合装置,控制弹性元件开合,从而能控制能量储存和释放,大幅提高了能量效率。
多模态弹性执行器 MEA(Multi-mode Elastic Actuator):是将多个执行器集成为一个系统,能够集合多方面优势。根据《双足机器人腿部及其驱动器的设计理论与关键技术研究》一文,Mathijssen 等使用多个带有锁紧环和锁板的不完全齿轮作为与电机并联的间歇结构。结构表明此装置可以降低电机扭矩要求,提高效率。目前由于此方案结构复杂,系统建模和控制也十分复杂,相关技术应用案例较少。

1.2.3 准直驱执行器:控制方式简单,能量效率高
准直驱执行器依靠电机开环力控,不依赖于附加力或力矩传感器。其优点是功率密度高,力控带宽大,抗冲击能力强等。最理想的技术方案是电机直接驱动,但受限于工艺和技术,电机直驱的扭矩密度不能满足机器人应用需求,故实践中仍然采用电机加低传动比减速器的方案。同时此方案要求负载质量和转动惯量尽可能小,故多用于机器人的低负载关节。
从结构上看,准直驱执行器由高扭矩密度电机、低传动比减速器、编码器和控制板等组成。根据《双足机器人腿部及其驱动器的设计理论与关键技术研究》一文,部分设计方案在电机基座和内齿圈间增加了离合结构,用于抵挡外界冲击造成的能量损耗,保护减速器。在编码器的使用方面,目前单编码器方案还没有很好地解决断电后回零位的问题,故主流设计方案多采用双编码器或单个新型多圈绝对值编码器。

1.2.4 几种执行器的对比
对比几种执行器方案的控制精度、功率特性、能量效率、安全性和应用场景等,可以得知在控制精度方面,刚性、并联弹性、准直驱执行器控制相对简单且精度高。功率特性方面,几种弹性执行器功率调制较好。能量效率方面,离合式弹性、多模态、准直驱执行器效率高。安全性方面,准直驱执行器具有反驱特性,安全性好。

1.3 特斯拉人形机器人执行器技术框架
我们以特斯拉 Optimus 机器人设计方案为例来分析执行器技术框架。Optimus Gen1 执行器布置方案为 14 个直线执行器和 14 个旋转执行器,Optimus Gen2 在颈部增加了 2个旋转执行器,其余部位预计未做调整。30 个自由度分布在颈部(2 个旋转)、肩部(3个旋转)×2、大臂(1 个直线)×2、小臂(2 个直线+1 个旋转)×2、腰部(2 个旋转)、髋部(2 个旋转)×2、大腿(2 个直线)×2 和小腿(2 个直线)×2。

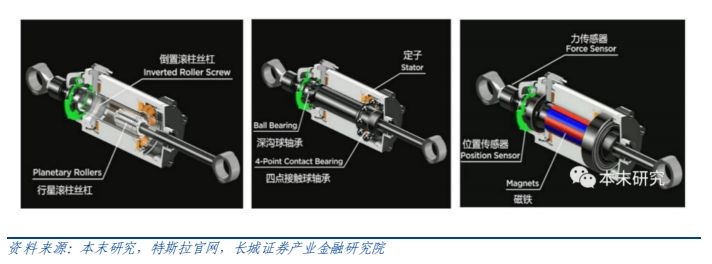
旋转执行器:伺服电机*1+减速器*1+力矩传感器*1+编码器*2+交叉滚子轴承*1+角接触球轴承*1。1)电机:采用无框力矩电机,预计为特斯拉自研方案。2)减速器:采用谐波减速器。3)力矩传感器:在手腕、脚腕部位可能会采用多维力传感器,其余部位用一维力传感器。4)编码器:采用输入位置和输出位置双编码器。

直线执行器:伺服电机*1+减速器*1+力矩传感器*1+编码器*2+丝杠*1+深沟球轴承*1+四点接触球轴承*1。1)电机:采用无框力矩电机,预计为特斯拉自研方案。2)减速器:可以使用行星减速器、RV 减速器。3)力传感器:预计采用一维力传感器。4)编码器:预计采用双编码器配置。5)丝杠:采用反向式行星滚柱丝杠,刚度高。

2. 电机:执行器系统的“血管”
电机(Motor)相当于执行器的“血管”,其作用是根据所接收的力矩、速度、位置等指令信号,带动机械部件实现特定运动。同时电机中的多种传感器,如编码器、力传感器等,还会将电机与机械部件的实时运作信息反馈给驱动器和控制器,从而完成精准运动控制。
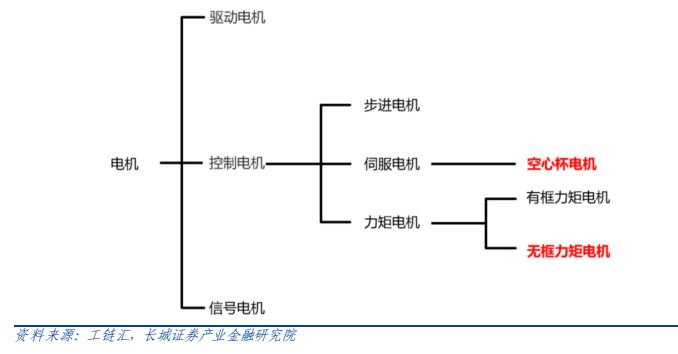
根据用途的不同,电机可以分为驱动类电机、控制类电机、信号类电机。机器人中的电机主要任务是完成对机械运动的精准控制,所以属于控制类电机。根据控制方式的不同,又可以分为步进电机、伺服电机和力矩电机,机器人对运动精准度要求,所以主要采用伺服电机或力矩电机。

2.1 伺服电机:无刷、直流方案是主要发展方向
伺服电机(Servomotor)是指在伺服系统中控制机械元件运动的发动机,它可把所收到的脉冲信号转换成电动机轴上的角位移或角速度输出。与步进电机相比,它多了一个与电动机相连的传感器,用于位置反馈,这意味着伺服电机每收到 1 个脉冲,就会发出对应数量的脉冲,与接收的脉冲形成呼应,或者叫闭环,如此一来,就能实现对角速度或线的位置,速度和加速度的精确控制。
就内部结构而言,伺服电机主要由定子和转子构成。定子上有两个绕组,励磁绕组和控制绕组。转子是永磁铁或感应线圈等导磁材料。转子在由励磁绕组产生的旋转磁场的作用下转动。同时伺服电机装配有编码器,工作时驱动器实时接受到编码器的反馈信号,再根据反馈值与目标值进行比较来调整转子转动的角度。

对比控制精度、变频特性、过载能力、响应速度等性能,可以看到伺服电机控制精度更高;低频时运转平稳、高频时能恒力矩输出;闭环控制使得过载保护能力更强;开机时响应速度更快。就产品特性而言,伺服电机更适配机器人高精度要求、多变环境的应用需求。


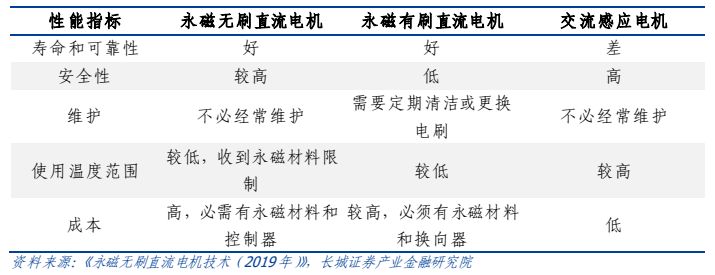
根据控制电源的不同,可以分为直流伺服电机和交流伺服电机。其中直流伺服电机根据是否具有电刷,又可以分为有刷直流伺服电机和无刷直流伺服电机。对比三种类型电机,可以看到直流伺服电机具有控制精准,转矩特性、线性调节特性较好,使用方便且价格便宜等优势。无刷直流伺服电机以电子转向器取代机械转向器,减少摩擦和噪音、延长寿命且安全性,但是一定程度增加了成本。根据《永磁无刷直流电机技术》一文,目前在航空航天和军事装备、工业自动化等领域,有刷直流伺服电机正在逐步被无刷直流伺服电机所取代。

我国伺服电机技术处于快速赶超阶段。目前技术水平大约落后西方 20 年左右,应用普及性相当于西方 40 年前的水平。具体看,我国伺服电机产品主要有以下几点缺陷:
外形普遍较长,外观粗糙,很难应用在一些高档机器人上面。尤其是在轻载 6kg 左右的桌面型机器人上,由于机器人手臂的安装空间非常狭小,对伺服电机的长度有严格要求。
信号接插件的可靠性需要改进,整体设计要与本体更好融合,时限小型化、高密度化,以便于安装、调试、更换。
高精度编码器的自研率较低,尤其机器人上用的多圈绝对值编码器,严重依赖进口,是制约我国高档机器人发展的很大瓶颈。编码器的小型化也是伺服电机小型化的重要驱动力。
伺服系统各部分产业协同联合不够,导致伺服电机和驱动系统整体性能难以做好。
磁性材料和制造工艺是生产重要环节。从产业链看,伺服电机上游主要是原材料和电子零部件等其他材料供应商。从工作原理可知,磁材是其制造过程中所必需的重要原材料,其寿命和性能直接影响伺服电机性能。中游包括电机、驱动器制造,数控系统研发等环节。下游应用领域包括医疗器械、机器人制造、汽车制造和工业装备制造等领域。
就参与企业而言,我国对磁材的开采、冶炼实行总量可控,由六大集团完成,代表性企业有中科三环、领益智造、安泰科技、银河磁体等。伺服电机制造生产企业则有汇川技术、星辰科技、江特电机等企业,其中汇川技术是国内伺服电机行业龙头。


受益于需求扩张,我国伺服电机市场保持稳健增长。根据中商产业研究院数据,2022年我国伺服电机市场规模 181 亿元,同比增长 7.1%。我国伺服电机市场由外资主导,外资品牌占比 65%。国产品牌汇川技术市场份额占比排名第一,市占率 15.9%。安川、台达、松下及三菱,占比分别为 11.9%、8.9%、8.8%及 8.3%。

2.2 无框力矩电机:人形机器人普遍采用的电机类型
无框力矩电机是力矩电机的一种,以输出扭矩的的大小为性能指标,通常可以被看成极对数很多的无刷、永磁、直驱伺服电机。因为力矩电机直接连接转子,不需要任何传动件,因此力矩电机属于直驱电机。又因为力矩电机极对数多,因此可以在中低速运动时,提供很高的扭矩。目前是人形机器人执行器普遍采用的电机类型。
就内部结构而言,相较于传统伺服电机、有框力矩电机,无框力矩电机没有轴、轴承、外壳和端盖,只有转子和定子两个部件。转子通常是内部部件,由带永磁体的旋转钢圆环组件构成,直接安装在机器轴上。定子是外部部件,齿轮外部环绕钢片和铜绕组,以产生紧密攀附在机器壳体内的电磁力。

无框力矩电机的主要优势有:w 更高的精度:以科尔摩根的直驱电机为例,其相关的产品位置保持能力比传统电机/减速机好 60 倍。
更大的带宽:直驱电机可以实现更快的启动/停止操作,并显著缩短了整定时间。
高可靠性且免维护:齿轮、皮带和其他机械传动部件可能会折断。在磨损比较严重的启动/停止应用系统中,减速机需要定期进行润滑或更换。皮带需要定期拧紧。在直接驱动电机中没有会随着时间磨损的部件,因而不需要维护。
部件更少,成本更优:虽然直接驱动电机的价格可能略高于相同转矩的有框电机/减速机,但是考虑到它不需要使用机械传动伺服系统的很多部件,并节约了所有额外部件的工作量,因而总体上仍然减少了成本。
降低噪音。


人形机器人有望带动力矩电机市场规模快速增长。根据海外市场研究公司 Technavio 数据,2023 年全球力矩电机市场规模增长 6.95%至 6.57 亿美元,市场空间较小。未来随着人形机器人逐步放量,无框力矩电机市场规模有望快速增长。若以 2030 年人形机器人出货量达 100 万台,同时无框力矩电机产品单价下降一半到 500 元/台来估算,预计人形机器人领域无框力矩电机市场空间将达到 23.97 亿美元,叠加传统领域市场空间的平稳增长,总市场规模有望达到 33 亿美元。

3. 减速器:电机和传动装置之间的桥梁
减速器(Reducer)是电机和传动装置之间的桥梁,其作用是将伺服电机输出的高转速、低转矩的动力转换为低转速、高转矩的动力,从而驱动机器人关节运行。受限于电机工艺技术,目前在机器人执行器中,减速器和电机通常搭配使用。
工作原理上,减速器是通过输入轴上的齿数少的齿轮啮合输出轴上的大齿轮来达到减速的目的,大小齿轮的齿数之比就是传动比。分类上,根据工作原理的不同,机器人用减速器可以分为 RV 减速器、谐波减速器、精密行星减速器。这三种电机都是基于行星齿轮传动原理发展而来的精密减速器。
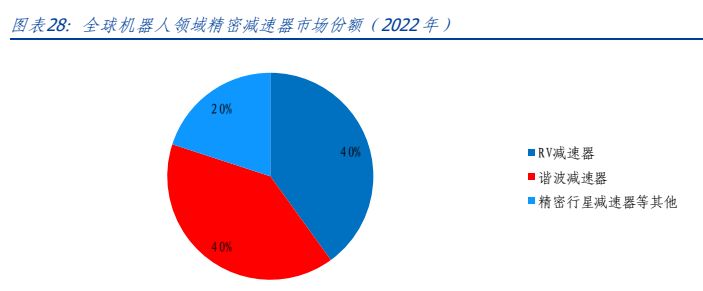
对比三种机器人常用精密减速器,可以看到谐波减速器优势在于体积小、价格相对便宜,非常适应用于机器人小关节;RV 减速器优势在于高负载、大传动比,更适用于重型机械或重负载机器人。从 2022 年全球销量来看,RV 减速器、谐波减速器的市场销售数量占比均为 40%左右,精密行星减速器、摆线针轮减速器、滤波减速器等共占 20%左右。


我国减速器市场具备一定规模,市场竞争趋于激烈。根据中商产业研究院数据,2022年我国减速器市场规模 1321 亿元,同比增长 5.01%,2017-2022 年五年 CAGR 约为4.23%。产量方面,2022 年我国减速器产量 1380 万台,同比增长 14.71%,2017-2022年五年 CAGR 约为 15.51%。均价方面,2022 年我国减速器均价为 9572 元,同比下滑8.46%,近四年呈现连续下滑趋势。
我国减速器主要应用在起重运输、水泥建材、重型矿山、冶金、电力和航空船用等国民经济及国防工业领域。2020 年起重运输行业使用减速机产品的数量占比约为 25.02%,水泥建材行业使用减速机产品的数量占比约为 14.89%,重型矿山行业占比约为 9.76%。


精密减速器领域仍有短板,未来提升空间较大。与日、欧美等发达国家相比,中国对精密减速器的研究开始较晚。20 世纪 80 年的研究主要集中在传动原理和构造分析上,国内缺乏精密减速器的核心设计和制造技术,相关产品大量依赖进口。“863”计划的实施加大了对相关核心技术的投入,我国精密减速器技术水平不断提升。目前我国产品整体仍存在承载能力弱、传动精度不高,使用寿命短、可靠性较差等不足,但与国外的差距正不断缩小。例如某国产品牌减速器的回差可以做到 0.375’,低于某进口产品的 0.452’。


3.1 行星减速器:高精度系列可以用于人形机器人
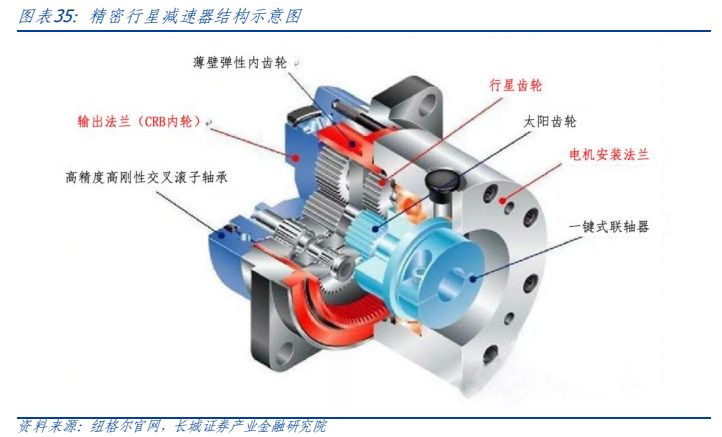
行星减速器由一个内齿圈固定,内齿圈中心有一个自外部动力所驱动的太阳齿轮,介于两者之间有三颗行星齿轮,该组行星齿轮通过滚针等分排布于行星架上。当入力侧动力驱动太阳齿轮时,可带动行星齿轮自转,并依附于内齿圈之轨迹沿着中心公转,行星齿轮公转之旋转带动行星架(出力轴)输出动力。普通行星减速器是一种通用减速器,不适用于机器人;精密行星减速器在驱动精度和级数上有明显提升,适用于机器人。
行星减速器技术首创于德国。19 世纪以来,受益于汽车和飞机工业的发展,行星齿轮技术和市场规模迎来快速发展。第二次世界大战后,全球工业化进程提速,减速器的应用拓展至舰船、发电机、压缩机等领域,也促进高速大功率、低速重载行星减速器的发展,行星减速器技术和应用走向通用化。
我国对行星齿轮传动技术的开发及应用,开始于 20 世纪 50 年代。改革开放以来,国内多家单位相继引进了国外先进的行星传动生产及设计技术,并在此基础上进行了消化吸收和创新开发,使得国内的行星齿轮传动技术取得了长足的发展。近 20 年来,通过对引进的磨齿机、插齿机、加工中心及热处理装置等的广泛应用,大大提升了制造水平,在硬件上也切实保证了产品的加工质量。总体而言,近年来我国在各类行星传动产品的开发与应用方面都取得了较大进展。
结构设计、材料选择和制造工艺是影响行星减速器机械效率的重要因素。机械效率的提高能够减少精密行星减速器的功耗、提高使用寿命和性能。根据《行星减速器机械效率影响因素分析》一文,目前主流精密行星减速器设计主要有以下特点:
传动比:传动比效率值随着传动比的变化而变化,通常传动比越大,机械效率越低。
在机器人等智能设备的应用中,通常采用多级行星减速器来满足小尺寸、大传动比的需求。对于多级传动比的计算,是将每一级的传动比相乘。因此,每一级减速器速比的分配对减速器很重要,是总体设计的主要内容。通常高速级的第一级传动选择较大的传动比,因为第一级的转矩最小,后面的传动比可以根据具体情况合理分配。
结构设计:行星轮和行星架通常被设计为对称布置来提高承载能力,普通行星轮采用 2-4 个不等,精密行星轮较多采用 3-4 个均匀分布。每增加一个行星轮,就增加了一对齿轮啮合,传动效率就会降低。因此,多级行星减速器为了结构紧凑,通常共用内齿轮。
材料:普通行星减速器的传动零件齿轮、轴、轴承等主要选用钢材承载能力强。精密行星传感器通常采用的材料有钢材、粉末冶金材料、工程塑料、铝合金等。内齿轮通常选用工程塑料,其强度大、耐热性好,可以自润滑。内齿圈通常选用工程塑料 PA66,其是一种熔点较高的聚酰胺(属于一种半晶体材料),且粘性低、流动性好,可以用来加工薄壁的元件。行星轮也可以选用工程塑料,如聚甲醛 POM、热塑性弹性、粉末冶金材料等。行星架可以选择铝合金材料。

我国行星减速器以中低端为主。据中商产业研究院数据,2022 年我国行星减速器市场规模 5 亿美元,约为35 亿元人民币,同比增长 6.16%,2018-2022 年四年CAGR 约为 14%。
我国市场主要参与者为外资厂商、合资厂商,高端精密行星减速器国产化率很低。日本新宝、科峰智能及纽氏达特是我国精密行星减速器市场的主要供应商,2022 年市场占有率分别为 20.4%、11.7%、9.4%。
--- 报告摘录结束 更多内容请阅读报告原文 ---
报告合集专题一览 X 由【报告派】定期整理更新
(特别说明:本文来源于公开资料,摘录内容仅供参考,不构成任何投资建议,如需使用请参阅报告原文。)
精选报告来源:报告派科技 / 电子 / 半导体 /
人工智能 | Ai产业 | Ai芯片 | 智能家居 | 智能音箱 | 智能语音 | 智能家电 | 智能照明 | 智能马桶 | 智能终端 | 智能门锁 | 智能手机 | 可穿戴设备 |半导体 | 芯片产业 | 第三代半导体 | 蓝牙 | 晶圆 | 功率半导体 | 5G | GA射频 | IGBT | SIC GA | SIC GAN | 分立器件 | 化合物 | 晶圆 | 封装封测 | 显示器 | LED | OLED | LED封装 | LED芯片 | LED照明 | 柔性折叠屏 | 电子元器件 | 光电子 | 消费电子 | 电子FPC | 电路板 | 集成电路 | 元宇宙 | 区块链 | NFT数字藏品 | 虚拟货币 | 比特币 | 数字货币 | 资产管理 | 保险行业 | 保险科技 | 财产保险 |


