马斯克署名论文首次公开透露Neuralink脑机接口及N1脑部传感器芯片原理!马斯克竟是第一作者?!贡献多大?
传感器专家网https://www.sensorexpert.com.cn
专注于传感器技术领域,致力于对全球前沿市场动态、技术趋势与产品选型进行专业垂直的服务,是国内领先的传感器产品查询与媒体信息服务平台。基于传感器产品与技术,对广大电子制造从业者与传感器制造者提供精准的匹配与对接。
今天,大家想必又被马斯克刷屏了,马斯克在社交媒体平台X上宣布,在昨天(28日),人类首次接受脑机接口(Neuralink)芯片植入,植入者恢复良好。

这是人类首次在在人体身上实现脑机接口芯片的植入,消息受到全球媒体的关注,我国新华网等各大媒体均纷纷转载这条信息,可见马斯克又干了一件不得了的大事。

从马斯克公司脑机接口项目操作流程看,手术将由机器人“R1”操作植入物“N1”植入大脑区域。约15分钟植入完成后,“N1”内的芯片将用于记录大脑信号并将其无线传输到Neuralink的解码运动意图应用程序。应用程序解码大脑信号后,通过蓝牙连接来控制外部设备。患者则使用Neuralink应用程序并通过蓝牙连接来控制外部鼠标和键盘,从而去做自己想做的事。
N1是由Neuralink于2019年研发成功的脑部可植入式传感器芯片,该芯片可以将细胞膜表面电位记录下来,并通过滤波等处理将其转化为数字信号。

▲Neuralink脑机接口技术中植入脑内的N1传感器芯片,大约硬币大小
那么,Neuralink脑机接口以及N1传感器芯片的原理是怎样的呢?
此前,Neuralink在生物学预印论文网站biorxiv上发布了学术论文《An integrated brain-machine interface platform with thousands of channels》,首次公开透露了该技术的部分细节。有意思的是,论文的第一作者是Elon Musk,没错,就是马斯克!好奇马斯克对这项脑机接口技术的贡献有多大?(该论文可在文末点击【阅读原文】查看)

Neuralink脑机接口N1传感器芯片的超细聚合物探针
N1脑部传感器芯片高效实现的关键之一在于“线”,为了更可靠的在大脑中植入这些线,Neuralink还做了手术机器人R1。
所谓的“线”其实是采用多种具有生物相容性的薄膜材料制造的微小位移神经探针,尺寸小,灵活性强。探针使用的主基板和电介质是聚酰亚胺,这种材料封装着金质薄膜迹线。

研究团队创建了小而灵活的电极“线”阵列。每个薄膜阵列由具有电极触点和迹线的“线”区和“传感器”区组成,“传感器”区的定制芯片薄膜接口可以实现信号放大和采集。
晶圆级微加工工艺使得这些器件的高通量制造成为可能。每个晶圆上绘制了10个薄膜器件,而每个薄膜器件具有3072个电极触点。
每个阵列由48或96个线程,每个线程包含32个独立电极。采用倒装芯片键合工艺将集成芯片键合到薄膜传感器区域中的电极触点上。
这样一来就不用担心这些“线”会像切皮蛋那样对待大脑了,缩小“线”的横截面积会最小化大脑中组件的位移。研究团队在保持高数量的电极通道的同时,使用步进光刻和其他微加工技术以亚微米级的分辨率制作金属膜。
在阵列中,研究团队设计和制造了20多种不同的“线”和电极类型:

▲我们的新型聚合物探针。A. “线性边缘”探头,有 32 个电极触点,间隔 50 μm。B.具有32个电极触点的“树”探头,间隔为75μm。C.增加了面板A中螺纹设计的单个电极的放大倍率,强调了它们的小几何表面积。D.两种表面处理的电极阻抗分布(在1 kHz下测量):PEDOT(n = 257)和IrOx(n = 588)。
线宽范围在5到50μm之间,包含几种几何形状的记录点。线的直径在4到6μm之间,包括最多三层绝缘层和两层导体。典型线长约为20mm。每条“线”都以 (16 × 50)平方微米的环作为尾巴,方便穿针。
由于金电极的几何表面积很小,研究团队采用表面改性来降低电生理学的阻抗,并增加界面的有效电荷承载能力。两种表面处理材料分别为聚苯乙烯磺酸盐(PEDOT)和金属铱氧化物(IrOx),后者虽然电阻更高,但是长时间使用的稳定性和生物相容性更好。
能够可靠植入N1脑部传感器芯片的穿线机器人
用薄膜聚合物做成的探针精细又灵活,问题是它们太软太灵活了,这增加了植入手术的难度。
Neuralink为此专门开发了一种用于植入柔性探针的神经外科机器人。这种机器人每分钟能植入6根探针,快速可靠,能避开血管并从分散的大脑区域进行记录。
机器人的植入头镶嵌在400mm × 400mm × 150mm的行程三轴平台上,并安装有一个小型、可快速插拨的针组。
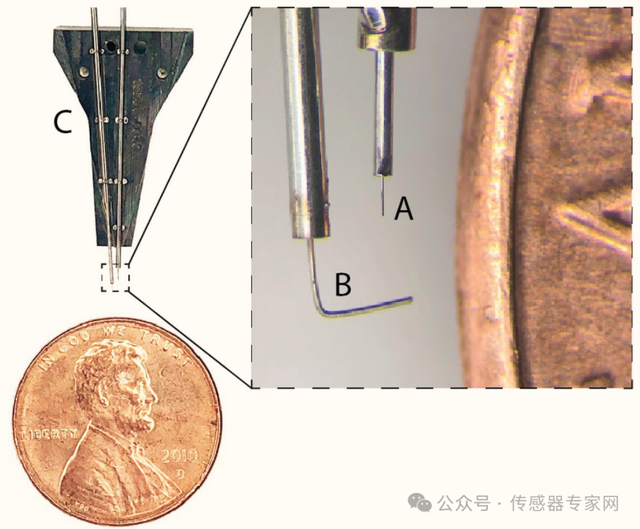
▲针钳墨盒 (NPC) 与一分钱的规模相比。A.针。B.平彻。C. 墨盒。
针由钨-铼线材电蚀刻而成,直径24μm。针尖被设计成钩环,用于输送和植“线”,并穿透脑膜和脑组织。针组由线性马达驱动,允许可变植入速度和快速回缩加速度(高达30,000 mm s-2),以帮助探针和针头分离。
夹钳是一根50μm的钨丝,在尖端处弯曲,并能轴向和旋转地驱动。它在输送过程中负责探针的支撑,并确保其沿针道植“线”。
下图显示了用这种机器人把电极插入琼脂“果冻”的过程。

▲1. 插入器用一根线接近大脑代理。i. 针头和套管。ii. 先前插入的螺纹。2. 插入器触地在大脑代理表面上。3. 针穿透组织代理,将线推进到所需的深度。iii. 插入螺纹。4. 插入器拉开,将线留在组织代理中。iv. 插入螺纹。
穿线机器人还包含成像组件(图中的E),用于将针引导到线环,插入目标,实时查看和验证。
此外,插入器头包含六个独立的光模块(图中的C),每个模块能够独立地以405 nm、525 nm和650 nm几种波长的光或者白光进行照射。
405nm照明用于激发聚酰亚胺的荧光,令光学组件和计算机视觉可靠地定位于16×50μm2的区域,执行亚微米视觉伺服以引导,再用650nm照射通过小孔。
立体摄像机基于软件计算的单眼扩展景深,用525nm光照射精确估计皮质表面的位置。

▲机器人电极插入器;插图中所示的插入器头的放大视图。A. 装载针钳墨盒。B.低力接触式脑位置传感器。C. 具有多个独立波长的光模块。D.针电机。E.四个摄像头中的一个在插入过程中聚焦在针头上。F.具有手术区域广角视图的摄像机。G. 立体相机。
这个机器人还会把植入位置记录到具有颅骨界标的公共坐标系中,当与深度跟踪相结合时,能够精确地瞄准解剖学定义的脑结构。
集成的定制软件套件允许预先选定所有植入位置,这样可以优化植入路径的规划,最大限度地减少“线”的缠结和绷紧。
规划机器人功能时,Neuralink强调了在植入过程中避免脉管系统的能力,这是机器人的关键优势之一。这一点是非常重要,因为血脑屏障的损伤被认为在大脑对异物的炎症反应中起关键作用。
这个机器人具有自动植入模式,整个植入过程可以自动化,但外科医生能够对其保持完全控制,如果需要,可以进行手动微调。
整个外科机器人是无菌的,能对针进行自动无菌超声波清洁。针组是插入器头部与脑组织直接接触的部分,属于消耗品,在手术中可在一分钟内更换。
该系统在19次手术中平均植入成功率为87.1±12.6%(平均值±s.d.)。每个手术平均插入时间为45分钟,插入速率约为每分钟29.6个电极。

用于处理传感器信号的专用ASIC芯片
用数千个电极位置的长期记录大脑信号,向电子设备和封装提出了极大的挑战。
高密度的记录通道要求信号放大和数模转换必须集成在阵列组件中。而且这个集成的组件必须能放大微弱的神经信号(< 10 μVRMS),同时抑制噪声。在最小的功耗和尺寸下,对放大的信号进行采样和数字化,并实时处理这些信号。
Neuralink的专用集成电路(ASIC)可以达到上面的要求。该集成电路由三个部分组成:256个独立可编程放大器(Neuralink把它叫做Analog Pixel)、片上模数转换器(ADC)、用于序列化数字化输出的外围控制电路。
 ▲封装的传感器设备。A.单个神经处理ASIC能够处理256个数据通道。这种特殊的封装设备包含 12 个这样的芯片,总共 3,072 个通道。B.聚对二甲苯-c基材上的聚合物线。C. 钛合金外壳(盖子取下)。D. 用于电源和数据的数字 USB-C 连接器。
▲封装的传感器设备。A.单个神经处理ASIC能够处理256个数据通道。这种特殊的封装设备包含 12 个这样的芯片,总共 3,072 个通道。B.聚对二甲苯-c基材上的聚合物线。C. 钛合金外壳(盖子取下)。D. 用于电源和数据的数字 USB-C 连接器。Analog Pixel具有高度可配置性:增益和滤波特性可以进行校准,以解决因工艺变化和电生理环境导致的信号质量变化。
1、片上模数转换器以19.3kHZ、10bit分辨率进行采样。
2、每个Analog Pixel消耗5.2μW,包括时钟驱动器在内,整个ASIC功耗6mW。
Neuralink专用集成电路的性能参数如下表:

ASIC构成了模块化记录平台的核心,便于研发人员更换组件。
在整个脑机接口系统中,ASIC和其他专用集成电路一起放在印刷电路板上。系统由一个FPGA、实时温度加速度与磁场传感器、全带宽数据传输USB-C连接器组成。
该系统封装在涂有聚二甲苯的钛金属外壳中,聚对二甲苯的作用是防止液体进入延长使用寿命。
Neuralink制造了两种不同配置的系统:一个包含1536通道(System A),一个包含3072通道(System B)。System A采用了新的ASIC,System B采用了功能相当但性能规格较差的早期版本。二者的差异如下:
 System B的优势是最大化信道密度,用于要求极高信道数的场景。System A的优势是制造起来更快更可靠,它的制造速度比System A快五倍,产量更高。
System B的优势是最大化信道密度,用于要求极高信道数的场景。System A的优势是制造起来更快更可靠,它的制造速度比System A快五倍,产量更高。连接以太网的基站将来自这些系统的数据流转换成多点传送10G以太网UDP数据包,允许下游用户以多种方式处理数据,比如实时可视化数据,或将数据写入磁盘。
每个基站最多可以同时连接三个植入物。这些设备还有软件生态系统的支持,允许零配置的即插即用性。当连接电缆时,系统可以自动传输神经数据。
如何记录脑电波
Neuralink使用换向电缆进行电生理记录,可以不受动物活动的限制。System A可以同时记录1536个通道中的1344个,在记录时可以任意指定通道配置的精度。系统B可以同时记录所有3072个通道。二者使用在线检测算法实时处理数字化宽带信号以识别动作电位(尖峰信号)。
但是实时脑机接口对尖峰检测的要求,与大多数传统神经生理学不同。电生理学家可以并花费大量时间离线处理数据,而实时检测的脑机接口必须最大化解码效率。
考虑到这些因素,Neuralink设置了>0.35 Hz的阈值来量化记录尖峰单元的电极数量。脑机接口解码器通常在没有尖峰分类的情况下运行,保证性能损失最小。

▲左图:宽带神经信号(未经过滤)同时从植入大鼠大脑皮层的单线程(32通道)获取。每个通道(行)对应螺纹上的一个电极位点(示意图在左边;位点间隔为50μm)。尖峰和局部场电位是显而易见的。右图:推定波形(未排序);数字表示线程上的通道位置。平均波形以黑色显示。
上图展示了System A的实验数据。在这个实验的1280个植入电极中,44个插入电极中有40个成功检测到信号,显示了局部场和尖峰活动图。右侧展示了尖峰信号的叠加图。
研究人员记录了所有1280个植入通道。在这个阵列种,尖峰的产生量是通道的53.4 %,许多尖峰出现在多个相邻的通道上,这和在其他高密度探针中观察到的结果一样。在19个脑机接口手术中观察到尖峰产生量为59.10±5.74%,最高值为85.5 %。
结语
Neuralink的脑机接口技术由脑部可植入传感器芯片和解码读取系统等构成,未来有望帮助癫痫、渐冻症、失明等病症患者恢复感觉、视觉、运动等能力在神经系统疾病的治疗当中也大有可为。但当前设备限制了这一技术在临床当中的应用。
Neuralink的成果推进了这一领域的落地应用,但从临床到更大范围的应用,不仅有赖于多学科领域的基础研究进展,在安全、伦理、价格等诸多方面也有许多值得进一步讨论的地方。
你觉得呢?
本文主要资料来自:
量子位《马斯克一作!Neuralink脑机接口细节公布,特殊材料防大脑损伤,专用芯片助技术落地》
biorxiv网站《An integrated brain-machine interface platform with thousands of channels》
