坎坷的过渡:苏二七飞机火控雷达(六)
前几期主要介绍雷达的基本构成,本期开始是雷达的技战术性能及使用方法,来源主要是网传俄语飞机使用说明书及NIIP网站等资料。
雷达瞄准系统RLPK-27是苏二七火控系统最主要组成部分,也是中远距攻击唯一瞄准手段。雷达瞄准系统主要提供以下功能:全天候定位、截获各种类型空中目标,海拔高度从30米到27公里;计算导弹发射包线,向SUO-27飞控系统发出引导指令,以及向半主动雷达制导空空发出修正指令;形成视觉战术显示信号向平显和下显输出,帮助飞行员正确瞄准目标和形成战术决策。
其它的功能还有:中近距空战中作为主瞄准通道给光电瞄准系统提供敌机坐标;或作为从瞄准通道给OLS-27光电雷达及头盔瞄准系统提供测距功能;接收地面及空中数传系统指令,按指令要求瞄准目标;通过空中数传系统向分队、中队其他飞机提供敌机坐标;接收飞机操纵杆相应开关指令,转换雷达工作模式。因雷达缺乏低脉冲重复频率波形,所以苏二七飞机在改进前不具备空面瞄准方面的功能。
为实现上述功能,雷达设置有以下工作模式:目标搜索检测与定位,雷达对发现的目标进行坐标测量,获得的目标坐标存入计算机并作威胁排序,如新发现的目标与数据库里的所有目标均不匹配,则被标记为新的目标。STsV-1计算机最多建立十个目标的轨迹,并在下显上按数字顺序表示威胁程度大小,如果有第十一个目标出现且威胁值超过之前最低的那个,那么作为新的目标建立轨迹。
此模式对应西方雷达的边扫边跟模式,威胁排序使用速度乘距离的方法,比如目标距离四十千米,时速一千千米,那么它的威胁程度要小于距离五十千米、时速一千五百千米的另一个目标。对于七八十年代中距空战,这是一种简便有效的排序方法,因为高速接近的目标具有高的敌对意图,可能抢先发动中距攻击。威胁排序给飞行员提供了直观的态势感知,尤其是在遭遇大规模空中突击的情况下。
当然这种方法也有局限性。高机动战斗机加速快、爬升迅猛,态势转换往往在半分钟就能完成,威胁排序不一定能准确反映实际情况。假如对方装备射程数十公里的中远程空空导弹,更加无法确认谁将抢先攻击,而速度最快的那个目标很可能是诱饵。因此威胁排序一般针对敌方大规模空袭比较有参考意义,飞的最快的攻击机代表f111之类的低空高速突防高威胁飞机,需要及时应对以免敌机突防成功。
边扫边跟模式由于天线扫描分配上的缺陷,更多的体现扫而不是体现在跟。因为天线大多数时间是在扫描过程中,对目标的扫掠时间只有短短的几十毫秒,然后间隔3秒左右再作一次扫掠,目标如果持续无规律机动,就容易脱离滤波器波门,导致跟踪失败。苏二七雷达瞄准系统多目标跟踪更多的体现在态势感知价值上,其跟踪精度、连续性不能满足主动制导空空导弹的中继制导需求。
美国空军率先装备AIM-120A主动雷达制导空空导弹,该导弹射程约改进型麻雀、R-27ER等空空导弹的1.5倍。与之配套的火控雷达为达成攻击隐蔽性,尽量推迟敌机对中距攻击的感知时间(从狂风ADV武器手册可知AIM-120A雷达位标器频段与机载雷达相近,非先进雷达告警接收机无法预警其攻击),增加重点目标态势感知、双目标跟踪、高速率边扫边跟等衍生模式。通过衍生模式对导弹进行中制导,显著提高中距攻击成功率。
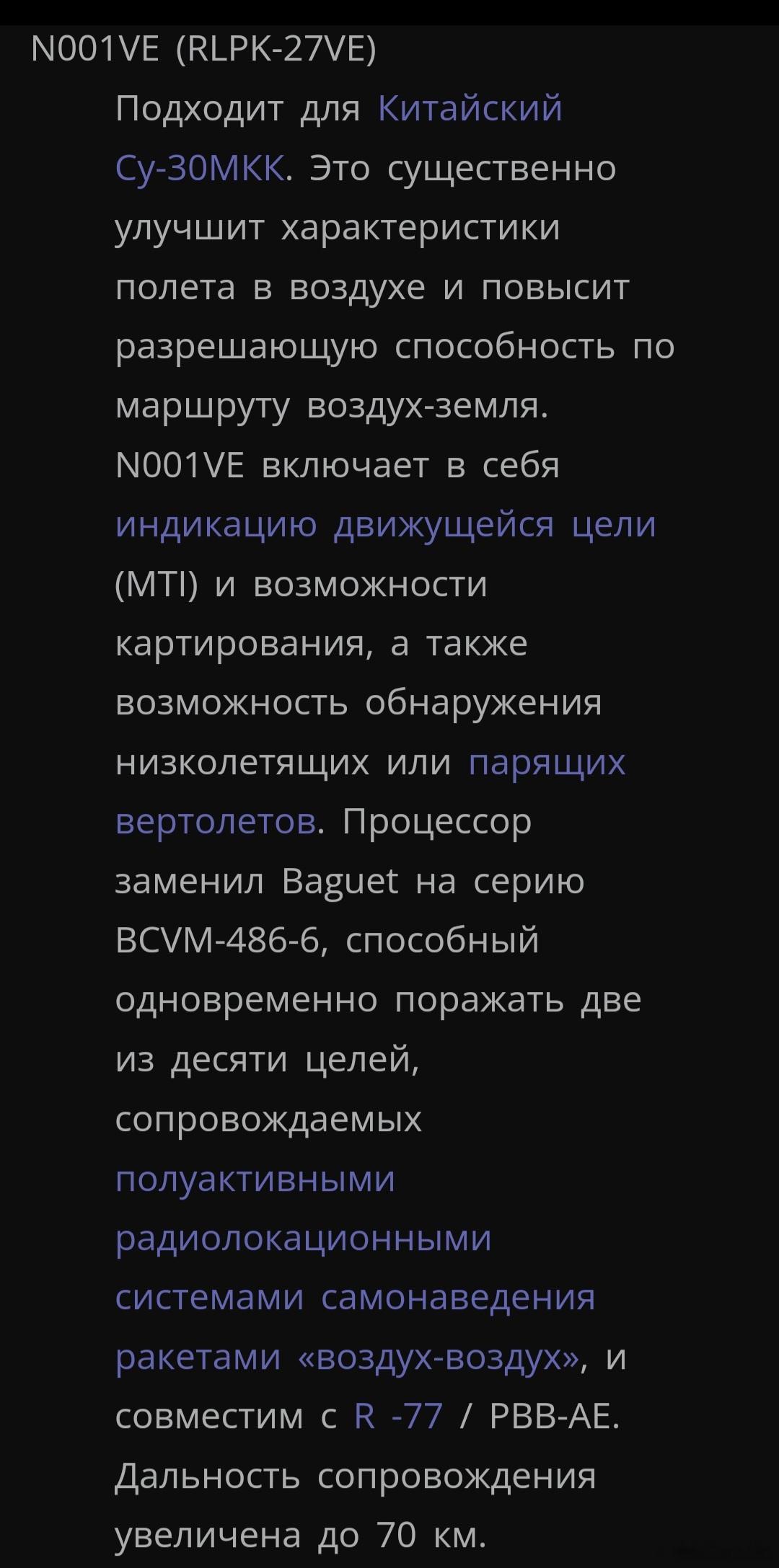
而原版苏二七雷达瞄准系统不具备上述特殊模式,故而无法适应九十年代后的空战要求。之后苏三零飞机改装R-77空空导弹,N001VE雷达亦换用基于X86架构的BTsVM-486数据处理机改善边扫边跟性能,理论上具备跟十打二的双目标攻击潜力。雷达在数据处理机尚未使用COTS高速处理架构的九十年代,机械扫描雷达跟几打几是项重要宣传指标,比如跟十打四、跟十打八等等,出于机械扫描的局限性,这些指标实战发挥机会不多,对机动目标的打四打八要到APG-77等先进电扫雷达装备后才能实现。
未完待续
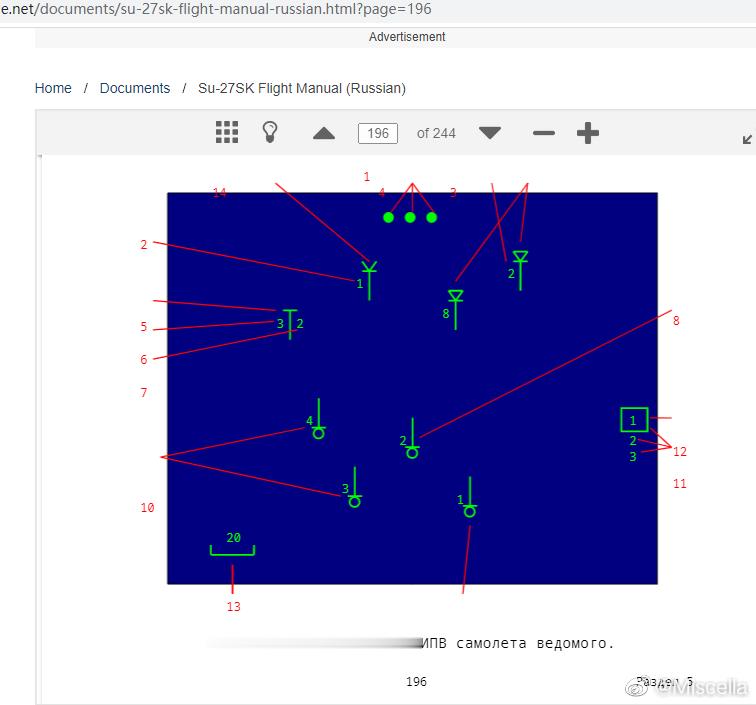
图四为IPV-1下显上的雷达B显定位图像,4个丁字形标志为敌机,丁字形左侧数字表示外敌机编号。图上判断1号目标最具威胁性,它应该是4个目标中速度矢量最高的。