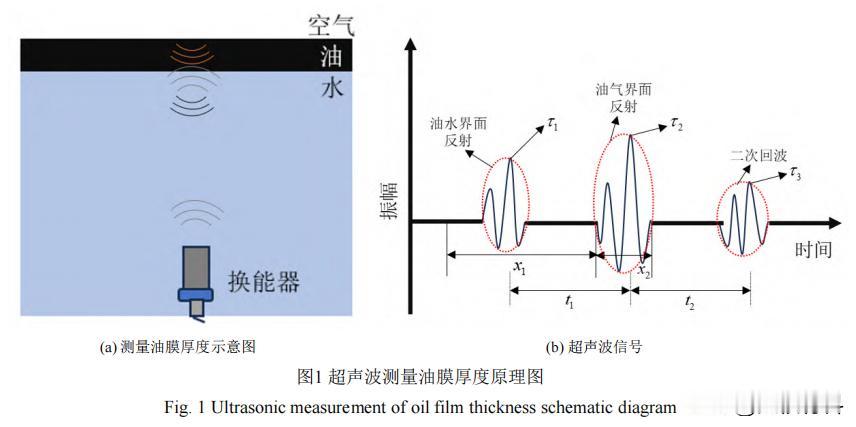
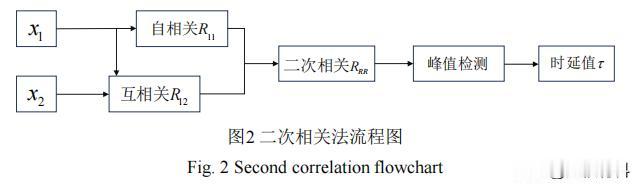
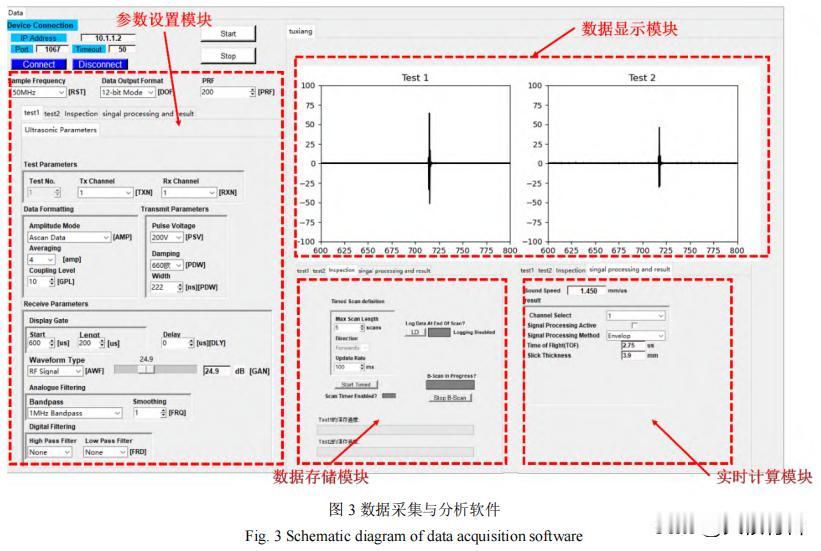
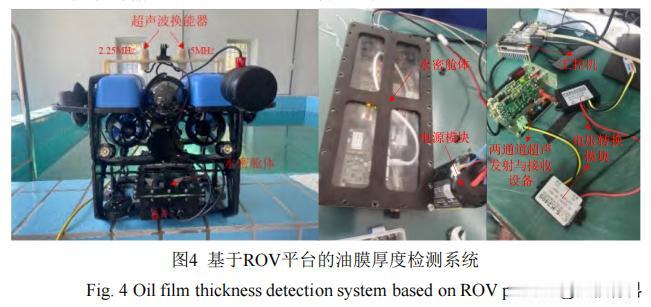
超声检测技术水下遥控机器人,用来测量油膜厚度,有望减少海上溢油事故的发生? 海上石油开采和运输过程中,溢油事故屡有发生,随着人类对海洋石油需求的增加,相关风险显著上升。由于石油密度比水小,泄漏的石油最终会漂浮到海面形成油膜,对鸟类、海洋哺乳动物、鱼类和其他生物造成严重影响,同时也给相关部门带来一定损失。 溢油量是衡量溢油规模的关键指标,是处理溢油事故的重要依据。油膜厚度是确定溢油量的基本前提,油膜厚度的准确测量可为溢油清理提供有效的指导,对海洋环境监测和修复具有重要意义。 2017年,某大学的研究团队提出一种,基于激光超声技术和激光多普勒测振仪的油膜厚度测量方法,但其测量能力可能受海面波浪和石油风化影响。 2019年,某海洋研究所采用无人机高光谱遥感方法,提出了归一化溢油指数模型、反比例模型和吸收基线模型三种油膜厚度估算模型,但其准确性可能会受到大气条件和光线条件的影响。 本篇文章针对现有检测技术对大气条件依赖性强、精度较低等问题,提出基于水下遥控机器人(ROV)平台的油膜厚度测量方法,采用二次相关法来精确计算超声波在油膜中传播时间(TOF),并通过对不同油膜厚度进行七次测量,验证了该方法的可行性和稳定性。 超声波测量油膜厚度的原理,是基于超声波在不同介质中存在界面反射的特性,因此可用于测量油膜厚度。 当超声波从一种介质传播到另一种介质时,部分能量将被反射,其反射强度与两种介质的声阻抗差异有关。超声波测量油膜厚度原理如下图1所示,由于油和空气之间的声阻抗差明显大于油和水之间的声阻抗差,因此通常油气界面反射要明显高于油水界面反射和二次回波。 二次相关法是通过计算信号之间的二次相关函数来求TOF,具体流程如下图2所示,与峰值法相比,二次相关法削弱了噪声对信号的影响,提高了抗噪性能,能获得更精确的时间估计。 为了比较峰值法、二次相关法的测量精度,在实验室搭建了一个油膜厚度测量装置,在超声探头的正上方放置了一个中心开孔为0.1m×0.1m的泡沫板,超声探头与水面的距离约为0.3m。 试验时通过针筒注射器每次向泡沫板内加入1mL油,厚度对应增加0.1mm,观察收集到的油水界面反射信号和油气界面反射信号,由完全重叠到逐渐分开的变化过程。 当加入的油体积超过10mL时,油层上下表面的超声反射信号完全分离,随后每次加入5mL油,直到总的体积达到40mL。每次加入油时,利用下图3所示的软件设置参数以及采集数据。 为验证采用ROV平台开展油膜厚度测量的可行性,搭建了如下图4所示的基于ROV平台的油膜厚度检测系统。2.25MHz和5MHz超声探头的频带宽度分别为1.53MHz和3.21MHz,两超声探头安装在ROV顶部以减少推进器对信号的干扰。 在实验室大水池中开展油膜厚度超声测量试验,为了抑制油扩散,在水池中围出了4m×3m的区域,如下图5所示,试验包括遥控模式和自主模式的油膜厚度超声测量试验。 遥控模式是指通过ROV传回来的实时画面,利用手柄对ROV进行远程控制。在试验过程中,先将ROV切换到遥控模式,然后使用手柄控制ROV在围油栏区域内来回运动。ROV的运动速度应保持在0.25m/s,同时设置数据采集时间间隔为0.1s,共采集600组数据。 自主模式是指ROV根据设定的路径进行运动和数据采集,先根据围油栏尺寸,设置如下图6所示的运动路径,设定ROV的巡航速度为0.25m/s,最后将ROV切换到巡航模式并启动。 ROV将从起点出发,按照规划路径运动进行数据采集,数据采集时间间隔为0.1s,当ROV运动到终点时,ROV停止运动和数据采集。 下图7为2.25MHz和5MHz超声探头采集的超声波信号,由图可得,2.25MHz最小可测量厚度约为1mm,5MHz最小可测量厚度约为0.5mm。 根据上述试验结果,选用二次相关法来计算油膜厚度,下图8为2.25MHz超声探头测量油膜厚度以及各点超声波信号。 下图9为根据ROV运动路径绘制的油膜厚度分布图,在加入相同油量下,2.25MHz超声探头和5MHz超声探头所测量厚度的变化趋势基本一致,表明该方法具有很高的稳定性。 本篇文章为提高海上油膜厚度测量的准确性和稳定性,提出基于ROV平台集成超声检测技术的油膜厚度检测方法,采用二次相关法来精确计算超声波在油膜中TOF以提高测量厚度的准确性。