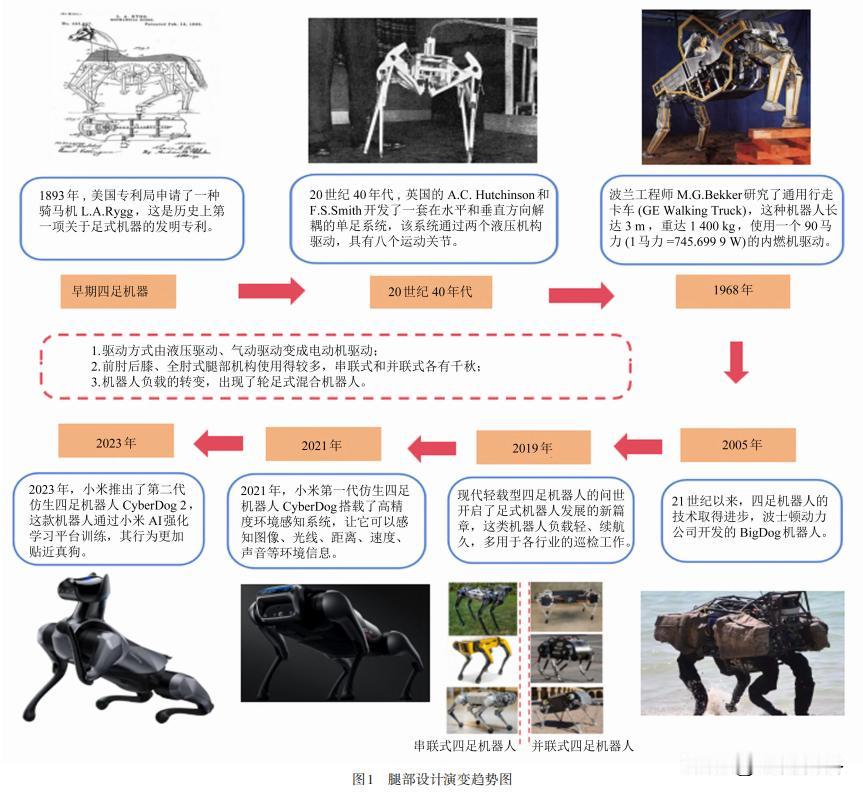
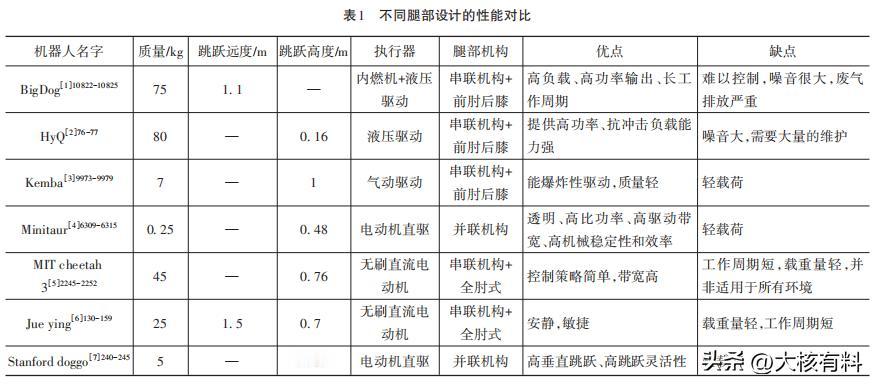
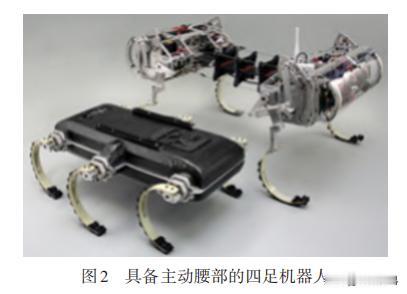
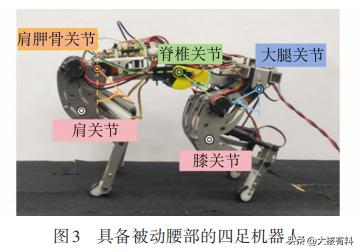
四足机器人具有高机动性,优化跳跃功能,能够提高它的适应性? 四足机器人具有在不平坦和复杂环境中高机动性和适应性的潜力,近年来逐渐成为机器人领域的研究热点之一。为了实现这样的能力,研究人员不断探索新的功能和技术,其中跳跃功能作为一种重要的运动能力备受关注。 2016年,研究团队通过给机器人增加主动尾翼的方法,来稳定机器人身体的俯仰,同时有效地改善了对腿部驱动器的约束,允许主动尾翼专门向系统添加能量。 2022年,技术专家在四足机器人RCQ上装配蛇形机器人尾巴,使其够执行动态运动,例如利用尾巴来实现四足运动的机动和稳定功能。 本篇文章综述了四足机器人跳跃功能的研究现状,重点关注跳跃功能的结构设计和控制模型设计,以期为构建具备高机动性和适应性的四足机器人,提供重要的实践指导。 四足机器人的腿部设计,在其跳跃功能中扮演着至关重要的角色,根据跳跃过程中的力学原理和动力学特性,并通过对机器人的驱动方式的选择、腿部关节设计以及腿部拓扑结构设计,可以最大限度地提高跳跃的推力和抗压能力,从而实现更高的跳跃高度和更远的跳跃距离。 为了更加清楚地了解各典型跳跃式机器人的腿部设计,下表1总结了各机器人的最大跳跃远度、最大跳跃高度、所选用的执行器以及腿部结构,对比分析了各种腿部设计的优、缺点,对各种腿部设计的发展过程及趋势的分析如下图1所示。 四足机器人身体设计主要是腰部结构的设计,腰部形式可分为主动腰部、被动腰部和刚性腰部3种。 主动腰部通常由多个关节组成,可以实现较大范围的运动和姿态调整。这种设计可以提高机器人的灵活性和适应性,使其能够在不同环境中执行各种任务。主动腰部需要配备相应的传感器和控制系统,以实现精确的运动控制,同时也会增加机器人自身的质量,如下图2所示。 被动腰部通常采用弹簧、气缸或其他类似的机械结构,用于支撑和缓冲机器人的运动,腰部弹性元件的收缩和舒张可以临时存储和释放能量,提升机器人的能量效率,但也会给机器人带来额外的扰动,增加机器人的控制难度,如下图3所示。 刚性腰部通常采用单一结构或少量关节,使得机器人的腰部相对固定,只能进行有限的姿态调整,相较于另外两种形式,结构简单,控制难度低,成本低,如下图4所示。 自然界中,在尾巴的帮助下,动物可实现高度敏捷、非周期性和灵巧的运动,例如猎豹在狩猎过程中的复杂行为和袋鼠优越的逃跑机动能力。为了提高移动机器人的敏捷性和可控性,受动物的启发,开始在移动平台上安装机器人尾巴。 弹簧倒立摆(SLIP)模型主要利用弹簧摆的周期性运动,这个周期性运动类似于钟摆运动,当在垂直方向上拉动弹簧时,弹簧摆开始做垂直方向的来回振动,振幅逐渐减小,并同时左右摆动。 滑移可以用弹簧上的一个质点来表示,如下图5所示,SLIP模型中的步态由站立和腾飞两个阶段组成。有弹性的腿在腾飞阶段调整着地角度,摆动到想要的位置;在站立阶段,通过压缩和释放弹簧,向前移动。 单刚体动力学被广泛应用于有腿机器人的控制,下图6所示为单刚体模型(SRBM),该简化模型考虑了地面反作用力对机器人身体的影响,忽略了腿部动力学,可以实时计算,如利用模型预测控制(MPC),能够实现高动态运动。 然而在规划这些运动时,实时MPC通常需要有限的预测范围,虽然单刚体动力学模型适合在线执行,但在对模型精度要求较高的情况下,需要采用全身动力学模型。 机器人HyQ的腿部控制采用了虚拟模型,机器人虚拟模型控制(VMC)总体框架如下图7所示。虚拟力由虚拟模型计算,并分配到关节上以实现预期的运动。这种方法通过虚拟力的计算和分配,实现对关节运动的精准控制,展现了其在复杂环境中的应用潜力。 在多足机器人领域的应用研究中,中枢模式发生器(CPG)控制器展示了在复杂地形上的卓越性能。铁拳机器人的设计团队采用腿部负载反馈机构来代替前庭器官反馈,来进行姿态控制,如下图8所示。 CPG控制方法对机器人模型的精度要求相对较低,这使得其具有很高的实用性。通过简单的激励信号即可驱动机器人,实现多种步态规划和灵活切换。这些研究成果表明,CPG控制器不仅在平坦地面上表现良好,在复杂的环境中同样具有优异的适应能力和控制效果。 随着电动机技术的发展,高负载低重量的电动机,将使未来四足机器人的驱动方式进一步电动机化,未来四足机器人的控制算法不局限于单一控制,而是根据机器人应用场景的需要,灵活搭配现有的控制算法。