2024年10月30日,MUNIK的高级合伙人&技术总监王建国先生,荣幸受邀出席AutoE/E2024智能汽车电子电气架构创新大会。此次大会受到了汽车产业的广泛重视,现场出席的代表有广汽研究院、上汽大众、东风日产、一汽大众、联合汽车电子、英飞凌、科世达、芯驰科技、东软睿驰等,在此次大会上,王建国先生结合汽车产业现状以及智能驾驶域控系统在功能安全方面的研究与实践,发表了题为《智驾域控系统ISO26262功能安全设计》的主旨演讲。


王建国先生的演讲主要围绕以下几个核心话题展开:1.自动驾驶现状及功能安全要求2.高阶智能驾驶系统安全开发面临的问题及挑战3.高阶智能驾驶系统安全开发流程融合实施实践
1自动驾驶现状及功能安全要求自动驾驶技术作为汽车产业转型升级的明珠,受到全球的广泛关注。以美国特斯拉在FSD上的探索为例,我国自动驾驶产业在人工智能时代具有重大实践意义,产业规模巨大。为此,我国出台了一系列政策支持,包括2017年7月8日国务院印发的《新一代人工智能发展规划》、工信部2018年发布的《促进新一代人工智能发展三年行动计划(2018-2020年)》等。《发展规划》提出,到2020年初步建立部分领域的人工智能伦理规范和政策法规,到2025年初步建立人工智能法律法规、伦理规范和政策体系,形成人工智能安全评估和管控能力。2018年12月25日,工信部专门就智能网联汽车发布《车联网(智能网联汽车)产业发展行动计划》。
根据中国新一代人工智能发展报告2020,辅助驾驶功能已大量集成在汽车的高级驾驶功能中。麦肯锡的研究报告指出,消费者对碰撞避免或碰撞预警系统、自适应巡航ACC、车道保持系统的支付意愿最高,愿意支付的平均金额分别为4100元、3100元、2700元。受访者反馈有意义的辅助驾驶功能占比达90%,显示具有高级驾驶功能的汽车已普遍受到消费者欢迎。
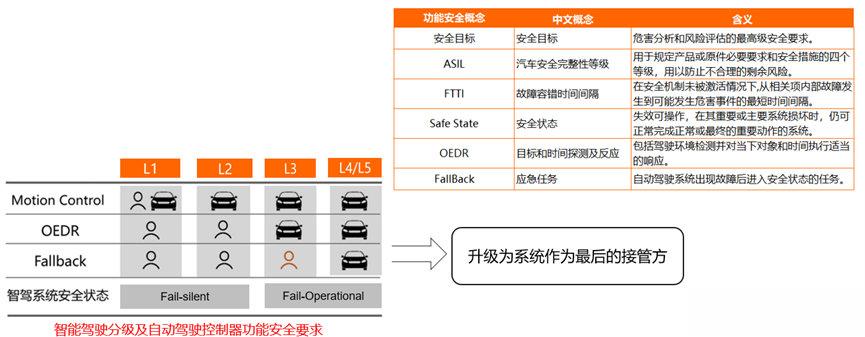
目前,各大主机厂的技术方案不断升级,由分布式向域集中式演化。大部分主机厂仍使用混合域的EEA架构,即部分功能域集中化,形成“分布式ECU+域控制器”的方案。这一过渡方案在消费者体验、技术发展、厂商成本三者之间寻求平衡。在工程方案成熟的同时,注重使用者安全的汽车功能安全研究已在理论方面做出大量探索。业界普遍将自动驾驶分为L1至L5级别,从运动控制、OEDR、Fallback、智驾系统安全状态等方面做了严格限制,规范了自动驾驶的成熟度要求。
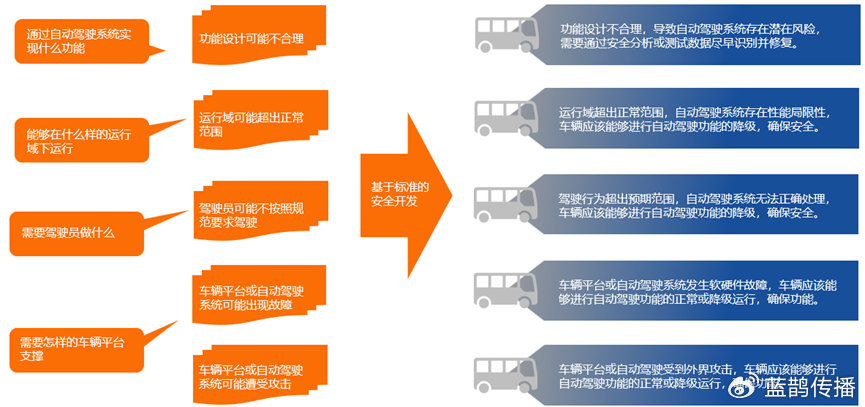
2高阶智能驾驶系统安全开发面临的问题和挑战在具体开发中,自动驾驶系统开发面临多方面的挑战,我们将其归纳为技术挑战和基于标准的安全开发挑战。技术挑战主要集中在算法、数据、硬件等支持,实现自动驾驶的基础能力。安全开发的挑战主要集中在功能安全、预期功能安全、网络安全等方面。下图列举了自动驾驶系统开发中可能发生的安全问题,包括自动驾驶设计不合理导致的潜在安全风险、外界攻击导致的功能失效或资产流失风险。
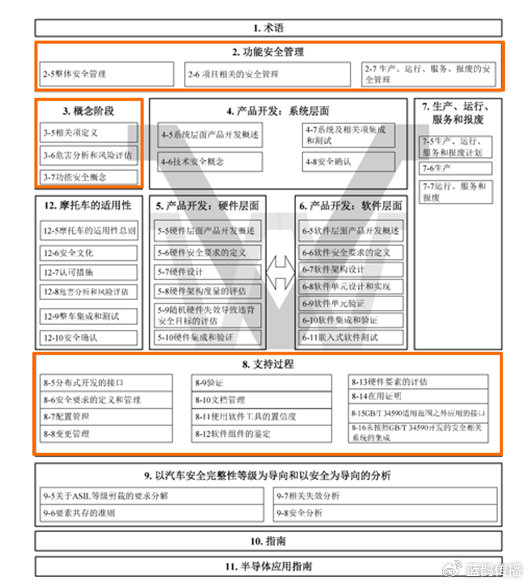
3高阶智能驾驶系统安全开发流程融合实施实践在高阶智能驾驶系统的研发中,仅遵从某一个标准的开发流程是不够的。对比ISO26262的开发流程,预期功能安全没有安全目标,没有针对不同安全等级的开发方法、没有指定的开发活动说明、缺乏现场监控。同样,对比ISO21434,没有特定的技术解决或解决方案、CAL仅用于独立性和测试、缺乏更具体的持续和后开发活动。
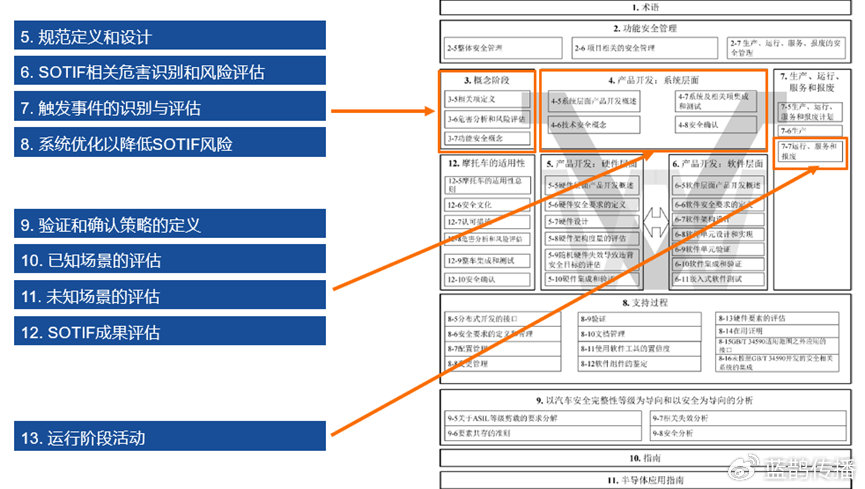
基于标准侧重的面不同,但在实际开发中需要相互使用的情况。MUNIK在标准体系的融合建立方面拥有丰富的咨询经验。例如,在功能安全和预期功能安全中,ISO26262的Part3可以与SOTIF的规范定义和设计、相关危害识别和风险评估、触发事件的识别与评估、系统优化以降低SOTIF风险相融合。在ISO26262和ISO21434中,组织层级和项目层级的功能安全和网络安全管理可以融合,概念阶段的功能安全分析和网络安全分析可以融合。
通过标准的融合,一方面建立企业完整的汽车零部件开发流程,应对业内外各方面的挑战;另一方面也节约了企业面临后续的重大风险,解决企业长期生存的安全问题。
上海秒尼科技术服务介绍:上海秒尼科技术(MUNIK)服务有限公司,成立于2019年,是一家专业化的技术服务公司,主要面向汽车产业及相关半导体行业提供基于ISO26262、IEC61508、ISO13849等功能安全标准、ASPICE汽车软件过程改进及能力评定、ISO21434汽车网络安全等的专业技术支持服务。公司拥有强有力的专业资深技术团队,并与TUV、Dekra等知名第三方认证公司的审核专家有广泛深入的合作,能够向客户提供从差距分析到标准咨询再到开发体系建设及产品认证的一揽子解决方案。

