大家好!今天我要为大家讲解的是一种具有创新性的材料——具有动态键重构的颗粒超材料。在材料科学领域,传统机械超材料存在局限,而具有动态键重构的颗粒超材料脱颖而出。它由独特的双材料结构颗粒组成,通过机械压缩和热刺激,能在不同状态间自由切换,其机械性能可调,还能实现集体运动,在众多领域展现出了无与伦比的潜力,接下来就让我们揭开它的神秘面纱。
*本文只做阅读笔记分享*
一、研究背景:探索新型材料的可重构性
在自然界中,许多生物材料和生物体具有非凡的能力,它们能够根据外界刺激动态地重新配置内部结构。例如,蛋白质的可重构组装以及细胞膜的融合与分裂等现象,就连水分子在结冰和融化过程中,通过氢键的形成与解离来改变状态,这些都极大地增强了它们在不同环境中的适应性和功能性。
而在合成材料领域,像动态共价聚合物和vitrimers这类具有动态键合相互作用的聚合物材料,凭借分子间键的动态形成与断裂,展现出了自修复和可回收等独特性质。
然而,传统的机械超材料却存在明显的局限性。它们具有固定的晶格结构,尽管在某些性能上表现出色,如泊松比、刚度、能量吸收能力、抗断裂性能和形状变换能力等方面常常超越其组成材料,但一旦制造完成,其结构就保持不变,无法像生物和聚合物材料那样进行动态键重构,这严重限制了它们在可重构性和适应性方面的发展。例如,虽然有像可变刚度的结构化齿轮等技术进步,可实现通过齿轮相对旋转来改变机械性能,拓扑结构的修改也能控制局部灵活性和全局稳定性,但这些机械超材料在制造后仍缺乏在外部刺激下拆卸并重新组装成其他拓扑结构的能力。
颗粒材料由离散颗粒组成,本身就具有诸如颗粒流和堵塞转变等复杂现象,这源于单个颗粒间的集体相互作用。颗粒的离散性和可聚集性为解决上述问题提供了可能,颗粒超材料应运而生。它通过设计离散的构建块,如采用复杂形状的颗粒、纠缠机制、拉胀行为、多稳定性和多样的接触相互作用等,实现了材料性能的定制。不过,现有颗粒材料组装成功能结构时,往往需要诸如张力绳、负压袋、颗粒间液桥或分子相互作用等额外的限制机制,这给组装后的重新编程带来了挑战,特别是在温度等环境刺激下进行结构重构时。而颗粒内的双稳定性则为解决这些问题提供了一种很有前景的方案。
二、颗粒超材料的设计与制备:创新结构与制备方法
1、结构设计
这种颗粒超材料的基本结构单元是双材料结构化颗粒,它由插入针(IPs)和接收夹(RCs)组成,二者交错排列。IPs由聚乳酸(PLA)制成,形状为带有椭圆形头部的支撑杆;RCs则由两个带有凹槽的三角形块组成,材质为弹性热塑性聚氨酯(TPU),并通过TPU韧带与IPs相连。这里定义n=8,表示每个颗粒包含八个IPs和八个RCs,当然也存在n=9和n=10等其他配置。

2、键重构原理
在压缩过程中,当两个颗粒靠近时,IPs开始与RCs接触。由于IPs的PLA材质相对较硬,RCs的TPU材质较软且具有弹性,在压力作用下,RCs会发生变形。随着压缩的持续,RCs会转变为第二种稳定的变形配置,此时RCs上的凹槽与IPs的椭圆形头部有效啮合,实现颗粒间的机械锁定,即键形成。
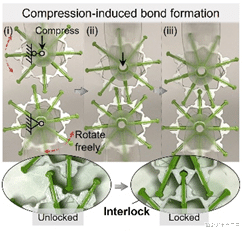
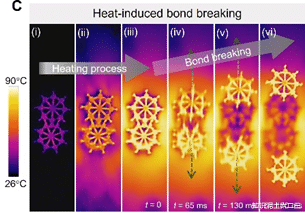
而在加热时,情况则相反。因为IPs的PLA在温度升高时会软化,对RCs的约束减小,RCs从双稳态转变为单稳态,从而恢复到初始的展开状态,颗粒间的键断裂,两个颗粒分离。
3、制备方法
颗粒通过多材料打印技术制备,采用熔融沉积建模工艺,使用UltimakerS3打印机,其喷嘴直径为0.4mm。打印时,初始层高度设为0.27mm,后续层高度为0.1mm,填充密度为100%。为防止RCs和IPs之间脱粘,RCs的韧带会延伸出额外的细长部分以增加与IPs的连接面积。在打印过程中,需要使PLA和TPU(或PETG和TPU)略微重叠,通过交替堆叠两种材料来实现牢固结合。
三、颗粒超材料的特性分析:组装、拆卸与机械性能
1、组装特性
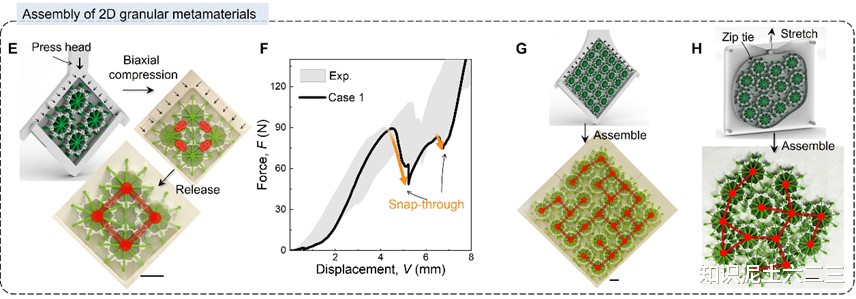
一维组装:通过实验和有限元分析研究发现,在一维组装中,例如将五个颗粒放入直线容器中压缩,颗粒会在压缩力的作用下自发调整位置,IPs和RCs逐渐对齐并锁定,形成类似固体的组装结构。在这个过程中,力-位移曲线会出现多个下降段,对应着颗粒位置的滑动调整和压缩引起的“snap-through”现象。当容器形状变为S形或U形时,颗粒会顺应容器形状进行组装,这充分展示了颗粒超材料的适应性和可重构性。

二维组装:利用定制的双轴加载装置对2×2颗粒阵列进行双向压缩组装。在压缩过程中,压头促使颗粒自主调整位置,IPs和RCs相互锁定,形成稳定的二维结构。实验中还发现,改变颗粒的初始相对位置并进行双轴压缩,会得到不同的键合模式,这体现了系统对初始条件的高度适应性和鲁棒性。此外,通过拉链带施加周向压缩,也能实现更多数量颗粒的组装,甚至可以对物体进行封装。
三维组装:通过修改颗粒上凹槽的角度,如使其倾斜20°,可以实现颗粒超材料向三维结构的组装。两个组装颗粒能够形成160°的倾斜键,进而组装成三维曲面结构,这为其在更复杂应用场景中的使用提供了可能。

2、拆卸特性
热致拆卸:以3×3颗粒超材料为例,当使用热风枪从右侧加热时,随着温度升高,颗粒间的键开始断裂,表现为颗粒向外弹出。通过局部加热的方式,从左至右依次对一维组装结构进行加热,颗粒会沿着容器轨道顺序喷射,喷射速度约为0.96m/s。

温度控制的顺序键断裂:将颗粒IPs中的PLA替换为聚对苯二甲酸乙二酯二醇(PETG),利用其较高的玻璃化转变温度(Tg≈80℃),可以实现温度控制的顺序键断裂。在实验中,将PLA基和PETG基组装颗粒同时放置在加热平台上,当平台温度升至70℃时,PLA基颗粒间的键断裂,而PETG基颗粒保持完整;当温度升高到100℃时,PETG基颗粒的键才开始断裂,从而实现了多步拆卸。

3、机械性能
压缩和剪切性能:对4×4颗粒超材料进行压缩和剪切测试,结果表明,在压缩过程中,由于泊松效应,组装状态下的水平键容易断裂,结构会逐渐分离成四个1×4的子结构;而未组装状态下,颗粒仅通过简单堆叠形成,缺乏内在的联锁,在压缩时外围颗粒会先坍塌,中心颗粒可能会形成一些键。在剪切测试中,组装状态下,随着剪切应变增加,内部键会断裂;未组装状态下,颗粒则主要表现为相对旋转。实验数据显示,组装状态的压缩刚度和初始抗剪切变形能力均显著高于未组装状态。
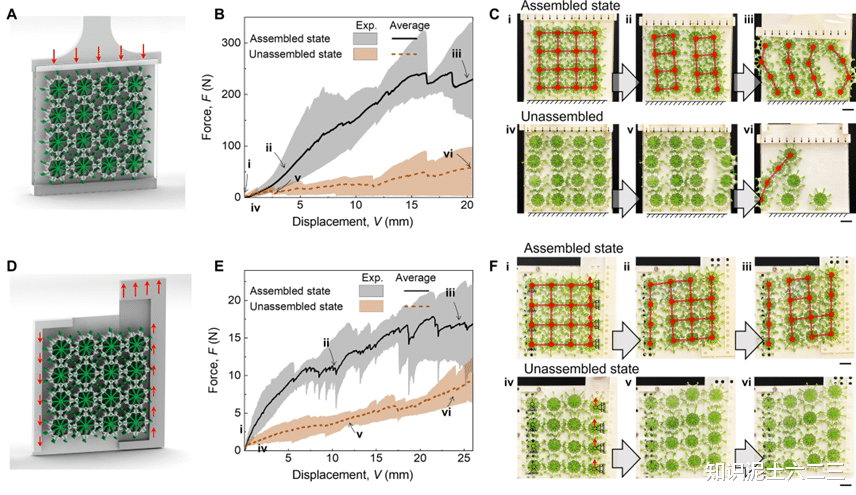
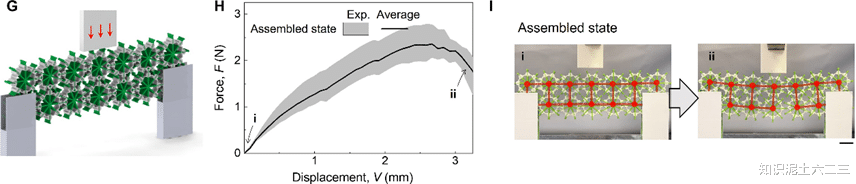
弯曲性能:对线形和弧形颗粒超材料进行三点弯曲测试,发现组装的弧形结构在弯曲过程中会经历顺序的键断裂,而未组装的松散堆叠结构由于缺乏完整性会立即坍塌。力-位移曲线表明,组装弧形结构的承载能力约为未组装堆叠结构的100倍。对于由7×2个颗粒组成的线形颗粒超材料,未组装状态下无法形成稳定结构,无法承受弯曲载荷,只有组装状态才能成功进行三点弯曲测试,不过其承载能力相对弧形结构较小,这主要受其结构稳定性和边界约束的影响。
四、颗粒超材料在可重构机器人中的应用:集体运动实现多功能任务
1、运动原理
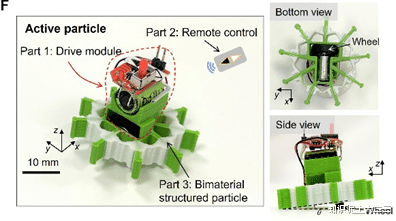
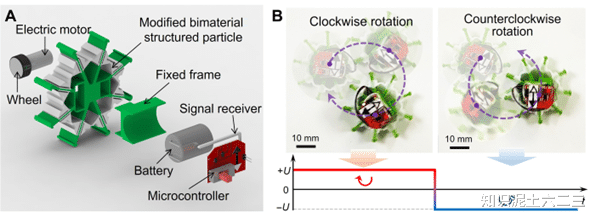
为使颗粒超材料实现集体定向运动,我们引入了一种集成驱动模块的活性颗粒。从其爆炸图可以看到,它基于修改后的双材料结构化颗粒,包含用于推进的电机连接轮子、提供动力的电池以及带有信号接收器的微控制器,用于获取和处理来自遥控器的信号。由于颗粒相对于地面倾斜,通过向电机施加正负电压,颗粒可以实现顺时针或逆时针旋转。
2、运动应用实例
圆周运动与定向运动:在一维组装结构中,当包含一个活性颗粒和五个被动颗粒时,活性颗粒的运动方向几乎垂直于结构方向,它能够驱动整个组件围绕中心点做圆周运动。而当结构中包含两个活性颗粒(AP1和AP2)时,通过特定的控制策略,如交替激活AP1和AP2,使结构先顺时针旋转180°并向右移动,然后逆时针旋转180°继续向右移动,从而实现定向运动。

跨越间隙与目标捕获运输:由三个活性颗粒和三个被动颗粒组成的一维颗粒超材料能够跨越间隙。其运动过程是先通过定向运动使一端的活性颗粒到达间隙边缘,然后在其余两个活性颗粒的推动下,成功跨越间隙,整个结构最终移动到间隙另一侧。

此外,颗粒超材料还能应用于多任务目标捕获和运输场景。例如,在捕获单个目标物体时,先将三个颗粒压缩组装成三角形结构,然后通过定向运动绕过障碍物捕获目标并运输到指定区域,最后返回初始位置并加热拆卸;在同时捕获多个目标物体时,使用由两个活性颗粒和三个被动颗粒在直线容器中压缩形成的一维结构,通过旋转运动捕获所有物体并运输到目标区域,之后返回并拆卸;还可以使用弧形结构将运输后的所有物体返回初始位置。

五、研究总结与展望:成果显著但仍有挑战
1、研究成果总结
综上所述,我们成功开发了一种动态可重构的颗粒超材料,它能够通过机械压缩和热刺激在未组装(类似液体)和组装(类似固体)状态之间可逆转变。凭借颗粒的离散特性,这种材料展示出了形状可重构性和对不同条件的高度适应性,在不同状态下其机械性能(如压缩、剪切和弯曲性能)具有显著差异,体现了可调的机械性能,能够满足特定功能需求。此外,颗粒超材料还表现出集体运动能力,如定向运动、物体捕获、运输和跨越间隙等,这些行为凸显了其对复杂条件的适应能力、高效的任务执行能力以及超越单个颗粒的功能,在机器人、智能结构和自适应系统等领域展现出了创新应用的巨大潜力。
2、研究局限与展望
尽管取得了这些成果,但目前的研究仍存在一些局限性。例如,颗粒超材料的组装目前依赖机械压缩,这种方式对于大规模或快速配置可能并非最优选择。而且,用于诱导键形成和断裂的刺激不同,这在一定程度上限制了系统的效率和实用性。未来的研究可以探索使用单一类型的刺激来控制键的形成和断裂,例如研究液晶弹性体或其他刺激响应材料,它们可能具备这样的控制能力。
同时,集成主动控制机制,如伺服驱动的致动或磁场控制,有望进一步实现机械性能的动态调整。通过使用具有不同变形阈值的材料,有可能仅通过一种刺激类型实现键的重构,从而简化过程并提高超材料的多功能性。此外,先进的制造技术,如多材料数字光处理和双光子聚合,为这些结构的微型化提供了有前景的途径,这将有可能扩展其在微机器人和其他对精度要求较高领域的应用。解决这些局限性对于推动动态可重构颗粒超材料的实际应用至关重要,将为各种先进领域带来更高效、更灵敏的系统。
六、一起来做做题吧
1、以下哪项不属于生物材料或聚合物材料的动态键重构带来的特性?( )
A. 细胞融合和分裂
B. 蛋白质可重构组装
C. 固定的晶格结构
D. 自修复和可回收性
2、颗粒超材料中的双材料结构化颗粒,其接收夹(RCs)的材质是什么?( )
A. 聚乳酸(PLA)
B. 热塑性聚氨酯(TPU)
C. 聚乙烯 terephthalate 二醇(PETG)
D. 以上都不是
3、在颗粒超材料的一维组装实验中,当容器形状改变时,颗粒超材料会呈现出怎样的特性?( )
A. 无法完成组装
B. 只能按照直线方式组装
C. 能根据容器形状自适应组装
D. 颗粒间键会自动断裂
4、在颗粒超材料的压缩测试中,未组装状态与组装状态相比,其压缩刚度和抗剪切变形能力如何?( )
A. 压缩刚度和抗剪切变形能力均更高
B. 压缩刚度更高,抗剪切变形能力更低
C. 压缩刚度更低,抗剪切变形能力更高
D. 压缩刚度和抗剪切变形能力均更低
5、在颗粒超材料实现定向运动的应用中,至少需要几个活性颗粒?( )
A. 一个
B. 两个
C. 三个
D. 四个
6、目前颗粒超材料研究的局限性不包括以下哪一项?( )
A. 组装依赖机械压缩,不利于大规模或快速配置
B. 诱导键形成和断裂的刺激不同,影响效率和实用性
C. 无法实现物体的捕获和运输
D. 可进一步探索使用单一刺激控制键的形成和断裂
参考文献:
Zhiqiang Meng et al. Granular metamaterials with dynamic bond reconfiguration. Sci. Adv.10, eadq7933(2024).
