大家好!今天来了解一篇关于受鸟启发的反射变形如何实现无舵飞行的研究——《Bird-inspired reflexive morphing enables rudderless flight》发表于《SCIENCE ROBOTICS》。在航空领域,飞机通常依赖复杂的尾翼结构来控制飞行姿态,然而鸟类却能凭借翅膀和尾巴的变形实现无舵滑翔。这背后究竟隐藏着怎样的奥秘?研究人员通过开发PigeonBot II机器人,模拟鸟类飞行机制,历经一系列实验,试图解开这个谜题,其成果有望为航空技术带来全新的突破与变革。让我们一同深入了解这项精彩的研究。
*本文只做阅读笔记分享*
一、研究背景
在航空领域,鸟类的飞行方式一直给科学家们带来诸多启示。与飞机不同,鸟类在没有垂直尾翼的情况下,能够通过翅膀和尾巴的形态变化实现稳定的无舵滑翔。例如,滑翔鸟类在复杂的气流环境中,仅依靠自身的身体结构调整就能保持飞行的稳定,这与飞机依赖垂直尾翼等结构来控制飞行姿态形成鲜明对比。
飞机通常需要水平尾翼来维持纵向(俯仰)稳定性,通过机翼上反角和垂直(或V形)尾翼来实现横向-方向(滚转和偏航)稳定性,就像我们常见的飞机,飞行员通过操纵水平尾翼的升降舵控制俯仰,使用机翼副翼控制滚转,依靠垂直(或V形)尾翼的方向舵控制偏航。然而,鸟类却能以更加灵活多样的翅膀和尾翼形态,在没有这些复杂机械结构的情况下实现高效飞行。这种独特的飞行能力引发了研究人员的深入思考,他们希望揭开鸟类无舵飞行的奥秘,并将其应用于飞机设计中,以提升飞机的性能,如降低雷达反射面积、提高飞行效率等。

二、研究内容
(一)TailBot实验
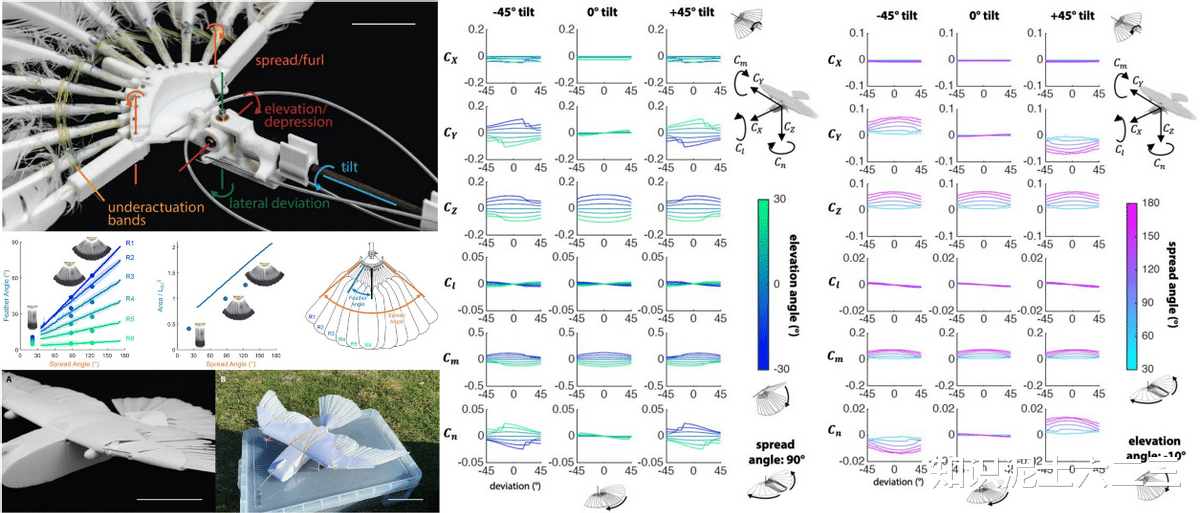
为了探究仅靠反射性尾翼变形是否能抑制飞行中的荷兰滚现象,研究人员开发了TailBot。TailBot的尾翼由12根弹性连接的鸽子羽毛组成,具备多种可控制的自由度,如羽毛的展开和收拢、升降、倾斜以及横向移动等。其中,尾翼倾斜能够产生偏航扭矩,这一特性在实验中得到了测量验证。
在实验中,TailBot安装在三自由度球轴承上,在风洞中进行虚拟飞行测试。当移除其备用垂直尾翼时,TailBot出现了荷兰滚不稳定现象,尽管反射性尾翼倾斜在一定程度上能够阻尼荷兰滚,但在大气飞行时,TailBot仍然由于尾翼滚转控制权限有限,出现了较大的滚转振荡,最终导致坠毁。

(二)PigeonBotII的设计与特性
1、结构设计
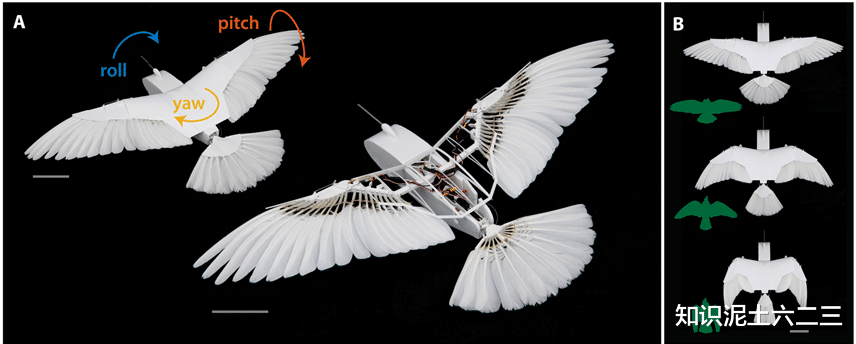
PigeonBotII结合了之前的变形机翼设计与TailBot的变形尾翼,其机翼和尾翼由52根鸽子飞行羽毛组成,这些羽毛在9个伺服电机的驱动下能够连续变形。机器人总质量约300g,与鸽子的质量相当,并且在手腕处安装了两个小型螺旋桨,用于实现不同飞行姿态下的上升、巡航、盘旋和下降等动作。

2、控制方案
研究人员为PigeonBotII选择了PID控制方案,以模拟鸽子的反射特性。具体来说,滚转控制通过结合机翼不对称、尾翼偏差(包括尾翼倾斜以增强鲁棒性)来实现,俯仰控制则由尾翼升降实现(为简化模型,暂不考虑机翼和尾翼展开)。由于鸽子反射记录显示尾翼倾斜对偏航角的响应接近零,因此偏航控制仅通过尾翼倾斜对偏航率的导数控制来实现,从而使PigeonBotII能够阻尼荷兰滚。

(三)控制策略确定实验
1、虚拟飞行测试
在风洞中的虚拟飞行测试中,PigeonBotII在开环(无主动控制)和仅使用飞机式偏航阻尼时,表现出不稳定的动力学特性,出现类似螺旋发散的情况。通过实施闭环反射变形控制,并针对不同的形态情况调整混合增益,PigeonBotII成功解决了荷兰滚问题,显著降低了滚转/偏航幅度翻倍的时间,并将荷兰滚的均方根(RMS)幅度减小到可控制的范围内。

2、控制增益确定
为了确定最佳的控制增益,研究人员对PigeonBotII进行了一系列测试,评估其在10倍频率范围内对15°正弦(左右)滚转指令的跟踪性能。实验发现,仅控制机翼不对称无法实现跟踪,而混合尾翼倾斜和偏差与机翼不对称能够更有效地跟踪滚转。最终确定的控制增益为[Kasymm, Kdev, Ktilt] = [1,2,1/4],这使得反射性滚转跟踪性能在1Hz及以下频率表现良好,与测量到的荷兰滚频率重叠。在不同攻角(巡航、巡航+3°、巡航-3°)下,PigeonBotII在各种机翼和尾翼形态组合中均能较好地跟踪正弦滚转。

(四)湍流鲁棒性测试
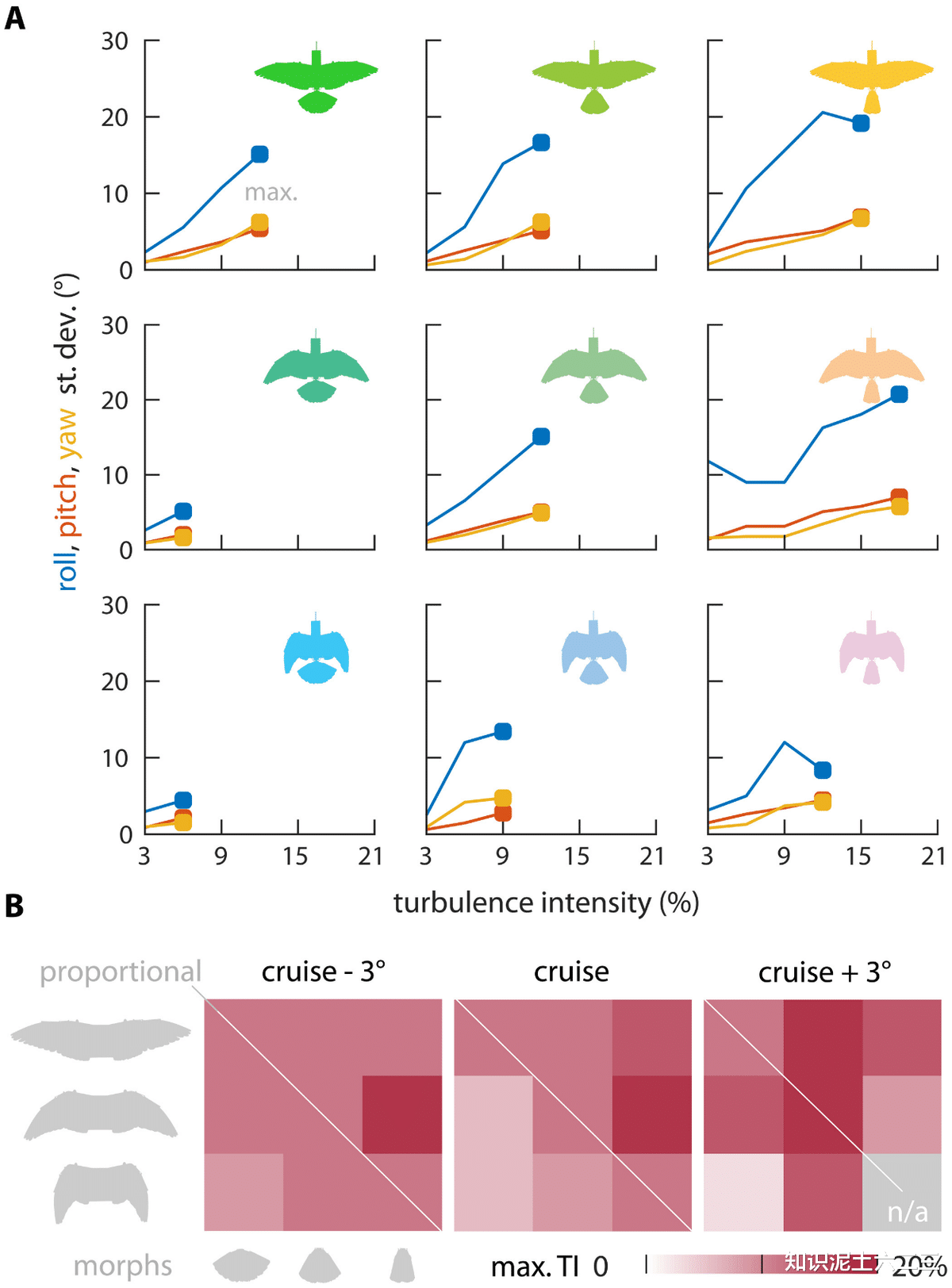
研究人员测试了PigeonBotII在湍流环境中的表现,发现其反射控制器在中等湍流强度(约12%)下对不同形态配置具有较好的鲁棒性。在实验中,鸽子般的比例变形机翼和尾翼配置表现较为稳定。然而,当尾翼体积过小时,如在某些特定的机翼-尾翼形态组合中,PigeonBotII在高攻角下的稳定性会受到影响,这也进一步说明了尾翼体积对飞行稳定性的重要性。
(五)自主无舵飞行测试
在大气飞行测试中,PigeonBotII展示了其自主反射控制器的有效性。它能够根据遥操作员设定的高级滚转和俯仰指令,在多种机翼和尾翼形态配置下实现自主起飞、巡航和着陆。

在自主盘旋测试中,除了中翼-尾翼收起形态(因俯仰控制权限不足导致下降过快)和全收起形态(盘旋时因类似原因俯冲坠毁)外,其他形态组合均能实现较为满意的自主盘旋。
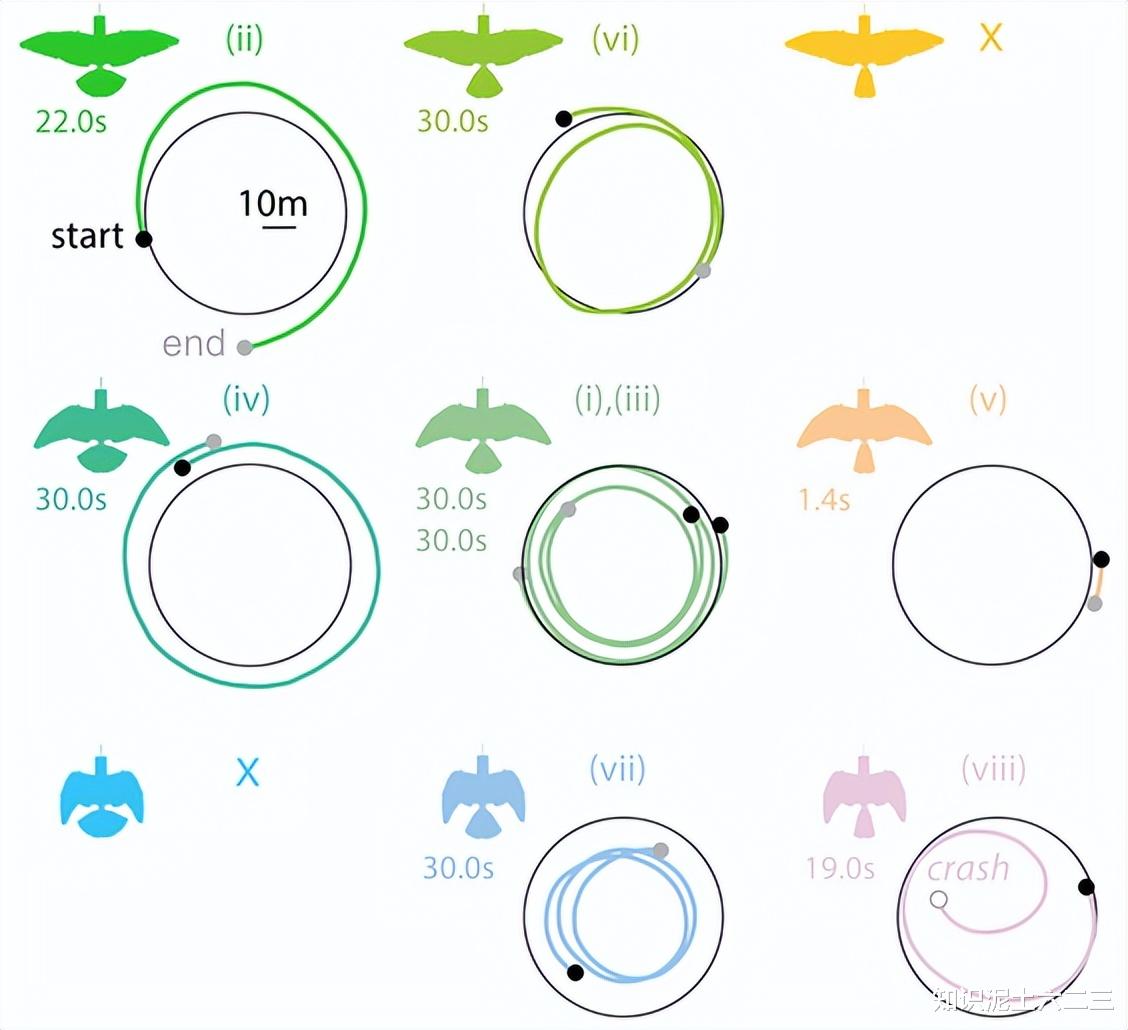
通过对比目标和实际实现的自主盘旋半径以及滚转角度,研究人员发现伺服电机的滚转控制限制了反射性变形飞行控制的可控性和准确性,但PigeonBotII的无舵飞行仍然证明了其自主反射变形控制回路的有效性。

三、研究意义
(一)证实鸟类飞行机制
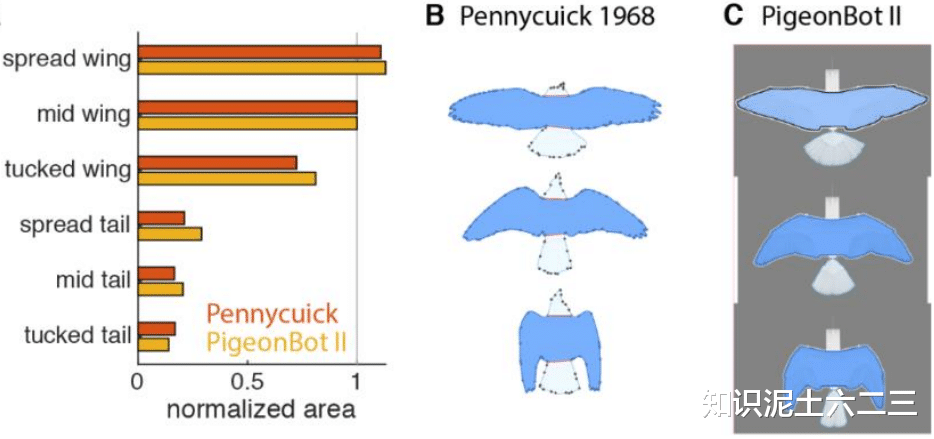
本研究通过实验证实了鸟类通过反射性变形实现无舵飞行的机制,支持了之前关于鸟类飞行稳定性和控制机制的假设,为进一步理解鸟类飞行提供了重要依据。例如,实验结果与对鸽子等非飞行鸟类反射研究的功能解释相吻合,验证了Groebbels提出的反射使鸟类实现自动控制飞行的假设,解释了鸽子在滑翔时倾向于采用比例变形的机翼和尾翼形态的行为偏好。
(二)为飞机设计提供新思路
鸟类启发的控制原理为无舵飞机设计带来了新的思路,有望提高飞机的性能。与传统无舵飞机相比,这种基于反射性控制的方法可应用于更广泛的变形机翼和尾翼平面形状,不仅能提高飞机的效率和机动性,还能降低雷达截面。例如,通过采用更大的尾翼控制面,可以减少实现被动稳定性所需的机翼后掠和扭转,甚至完全消除垂直尾翼的阻力以及基于阻力的偏航控制,如传统飞机垂直尾翼的阻力和飞翼式飞机中分裂襟翼等偏航控制手段。
(三)推动未来飞行控制技术发展
本研究中采用的基本PID控制方案结合增益调度和机翼-尾翼变形响应IMU反馈的方式,为未来无舵飞行车辆的控制技术发展提供了基础。未来,更先进的控制技术,如非线性模型-基于和最优控制,有望进一步提升飞行器的机动性和抗干扰性能;现代控制技术,如人工神经网络或脉冲神经网络,可实现更接近生物处理方式的无模型控制,并增加更多样化的传感方式,如模仿鸟类丝状羽的分布式气流传感器,以主动避免失速;同时,创新研发与鸟类肌肉性能相当的微执行器,将有助于实现更高效的无舵变形飞行控制。
四、总结
本研究通过开发PigeonBotII机器人,深入研究了鸟类无舵飞行的机制,并成功实现了基于反射性变形的无舵飞行。研究结果不仅证实了鸟类飞行的独特机制,还为无舵飞机设计和未来飞行控制技术发展提供了重要的参考和方向。这一研究成果有望在航空领域带来新的突破和创新,推动飞行器性能的进一步提升。
五、一起来做做题吧
1、与飞机相比,鸟类实现无舵飞行的关键在于( )
A. 更轻盈的身体结构
B. 连续变化的翅膀和尾巴形状
C. 对气流更敏锐的感知
D. 更高的飞行速度适应性
2、TailBot 在大气飞行中出现问题的主要原因是( )
A. 羽毛材质不适合大气环境
B. 尾翼滚转控制权限有限
C. 缺乏有效的动力系统
D. 虚拟飞行测试与实际环境差异大
3、PigeonBot II 选择 PID 控制方案的依据是( )
A. 该方案在其他机器人中应用广泛
B. 为了模仿鸽子观察到的反射特性
C. 其计算简单且易于实现
D. 可有效避免湍流干扰
4、在确定 PigeonBot II 控制增益的实验中,发现哪种控制方式单独使用无法实现滚转跟踪( )
A. 尾翼倾斜
B. 机翼不对称
C. 尾翼偏差
D. 尾翼升降
5、PigeonBot II 在湍流环境中,哪种机翼和尾翼形态配置表现出较好的稳定性( )
A. 极端比例变形的形态
B. 随机组合的形态
C. 鸽子般比例变形的形态
D. 固定不变的形态
6、PigeonBot II 在大气飞行测试中,哪种形态组合在自主盘旋时出现了俯仰控制权限不足的问题( )
A. 中翼 - 展开尾翼
B. 全展开形态
C. 中翼 - 尾翼收起
D. 全收起形态
7、本研究对未来无舵飞机设计的主要影响在于( )
A. 可直接应用现有控制方案
B. 启发更广泛的变形机翼和尾翼设计思路
C. 证明传统飞机设计无需改进
D. 仅适用于小型无人机设计
参考文献:
Eric Chang et al. Bird-inspired reflexive morphing enables rudderless flight. Sci. Robot. 9, eado4535(2024).
