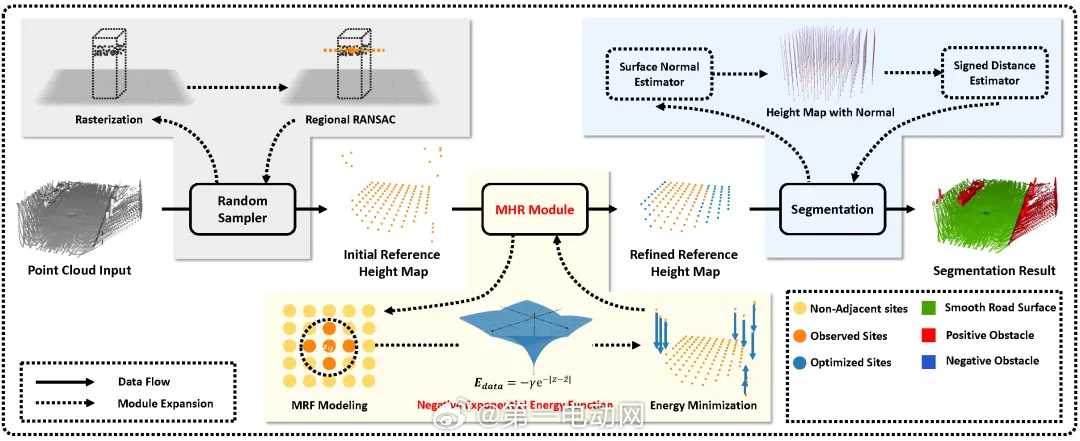
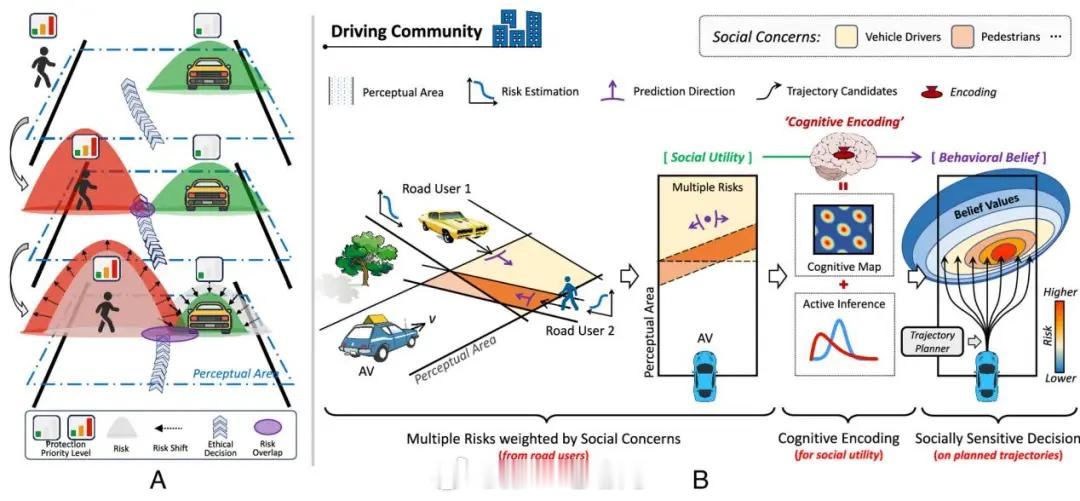
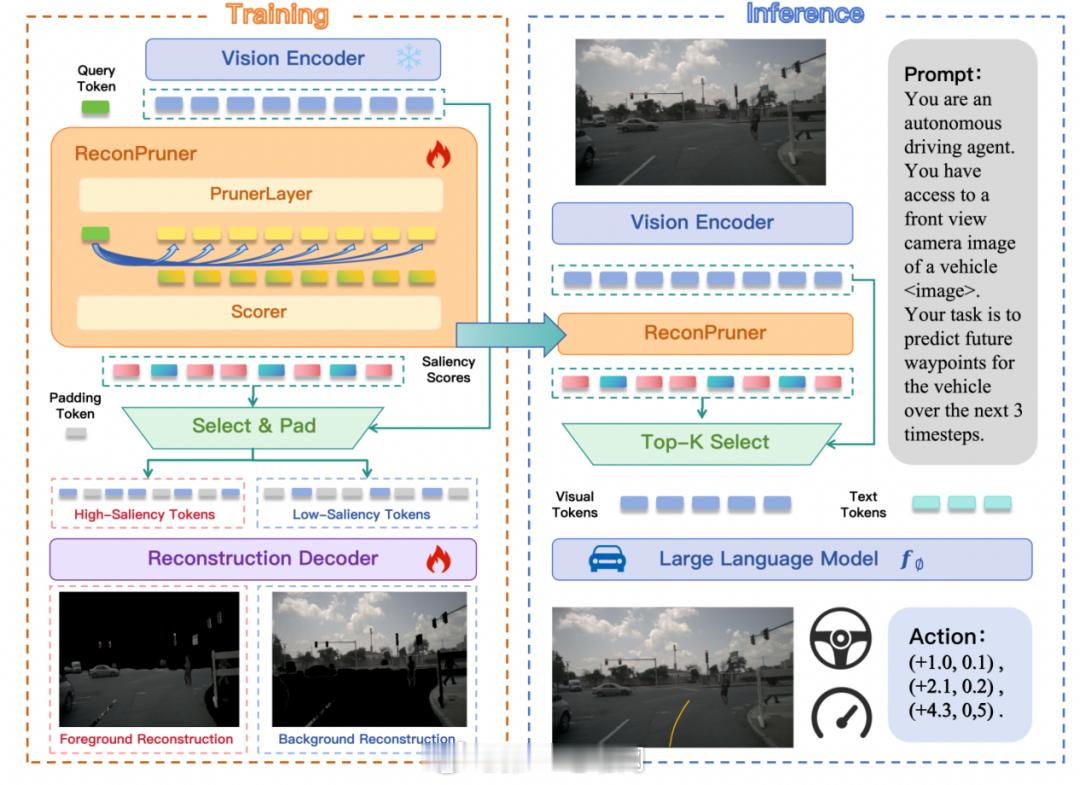
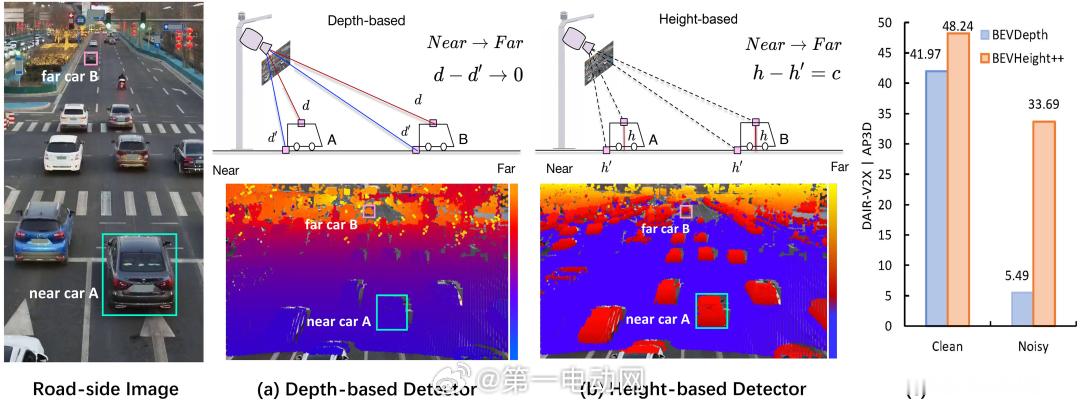
2025智驾天梯榜年度盛典2025中国智驾开发者50人 “茨威格说过,一个真正具有世界历史意义的时刻——一个人类群星闪耀的时刻出现以前,必然会有漫长的岁月无谓地流逝而去。类似的话,中国古人也说过:‘天不生仲尼,万古如长夜’。你知道的,仲尼来的时候,不是一个人,而是一票人,他们一起争奇斗艳,改写了其后的2500年。”具体的说,是2024年11月和2025年9月,中国智驾行业突然出现的两次拐点,在【智驾大赛】上表现为参赛成绩突然大幅提升。把这两次拐点串起来,你会看到一条清晰的攀登脉络:1️⃣ 车端模型进化:E2E模型从2024年Q4的“两段式”迭代为2025年Q4的“一段式”,在结构化城市场景的能力与体验上已逼近特斯拉FSD V13;2️⃣ 云端基座升级:从“BEV+OCC+Transformer”感知底座,演进为“VLA+WA+RL+Transformer”复合架构,融入理解与推理,打开跨域应用大门。2025年度,谁在推动智驾进步?为此我们将推出《2025中国智驾开发者50人》系列,首期推荐这11篇卓越论文的作者与团队👇1、 杨磊(清华大学2020级博士研究生):在“海拔高度”中寻找纯视觉感知的精确性合著团队:清华大学李骏院士团队《BEVHeight++: Toward Robust Visual Centric 3D Object Detection》(3D目标检测通用框架)——用“高度”替代“深度”,为纯视觉3D感知打下“物理骨骼”,让系统在坡道、颠簸路面上更稳定。(图二、三)2、曹家俊(北京大学计算机学院多媒体信息处理全国重点实验室):在算力红线面前,让模型“少看一点”合著机构:小鹏汽车《FastDriveVLA:Efficient End-to-End Driving via Plug-and-Play Reconstruction-based Token Pruning》(基于重建的新型视觉token剪枝框架)——通过token剪枝框架,将VLA计算负载降低75%以上,让大模型在车端也能轻盈运行。(图四、五)3、鲁洪良(香港科技大学(广州)博士):为冰冷死板的机器注入“社会直觉”合著团队:东南大学、香港科技大学等团队《Empowering safer socially sensitive autonomous vehicles using human-plausible cognitive encoding》(利用类人认知编码赋能更安全、具有社会敏感性的自动驾驶汽车)————提出“拟人化认知编码”,让智驾系统具备“社会直觉”,在路口实现更拟人、更安全的交互。(图六、七)4、 明南(上海交通大学自动化与感知学院2023级硕士):看清脚下路面的“褶皱”合著团队:上海交通大学智能网联电动汽车创新中心团队《TA-TOS: Terrain-Aware Tiny Obstacle Segmentation Based on MRF Road Modeling Using 3-D LiDAR Scans》(基于马尔可夫随机场的地形自适应小型障碍物分割算法)——专注坑洼、碎石等小型障碍物检测,用LiDAR+MRF模型为智驾补上“非平整路面”这一关键拼图。(图八、九)5、郑宇鹏(中国科学院自动化研究所2024级博士):在无标注的荒原上,让机器学会自我进化合著机构:理想汽车《World4Drive: End-to-End Autonomous Driving via Intention-aware Physical Latent World Model》(融合多模态驾驶意图的物理潜世界模型端到端自动驾驶框架)——构建意图感知的物理潜世界模型,实现无标注自监督学习,碰撞率降低46.7%。(图十、十一)6、陈小雪(清华大学智能产业研究院(AIR)赵昊课题组):0.4秒,让仿真训练进入“大批量自动化生成时代”合著结构:小米汽车《DGGT: Feedforward 4D Reconstruction of Dynamic Driving Scenes using Unposed Images》(自动驾驶仿真场景的无姿态图像4D前馈重建方案)——将4D仿真场景重建时间从数小时缩短至0.4秒,推动智驾仿真进入“工业流水线时代”。(图十二、十三)7、马楠(北京工业大学信息科学技术学院教授):让智能驾驶“活过来”合著团队:李德毅团队(中国工程院院士)《Embodied Interactive Intelligence Towards Autonomous Driving》(迈向自动驾驶的核心技术框架)————提出“具身交互智能”架构,让智驾从“感知-规划-控制”转向具备社会常识的交互生命体。(图十四、十五、十六)8、中科院自动化所:用世界模型解决“监督赤字”第一作者:Liyingyan(音译李英艳,图片资料暂时空缺);合著结构:引望智能《DriveVLA-W0:World Models Amplify Data Scaling Law in Autonomous Driving》(基于世界模型增强自动驾驶数据规模化效应的研究)——用世界模型提供稠密监督信号,破解VLA“监督赤字”,释放数据规模潜力。(图十七、十八)下一条继续。。。


![我会骂腾哈格买人垃圾,会骂阿莫林固执,但说他们没啥技战术[???],自媒体发消](http://image.uczzd.cn/348061925118446388.jpg?id=0)