引言:
自动驾驶,一个深远的概念,代表着未来交通领域的技术革命。早在20世纪20年代就有人提出,这一理念在80年代开始萌芽,如今正在向我们走来。当今时代,随着城市化进程的加快,道路交通拥堵和事故频发成为日益突出的问题。人们对道路上的“困境”感到越来越无奈。
自动驾驶技术或许是解决这一问题的钥匙。这一领域的研究正在全球范围内蓬勃发展,顶级研究机构如麻省理工大学的TOYOTA-CSAIL、斯坦福大学的SISL纷纷投身其中,国内外知名公司如Uber、Tesla、百度也不甘落后。自动驾驶物体3D检测、目标跟踪等各子任务的挑战榜单层出不穷,显示了此项技术的复杂性和挑战性。
智能车与传统车辆的最大不同在于其搭载了众多高科技感知设备,如激光雷达、摄像头、GPS、毫米波雷达等。这些设备使智能车能够实现对环境的感知、对物体的识别与跟踪、对自身的实时定位等复杂任务,进一步确保了驾驶的安全性。自动驾驶不仅是一项技术,更是一次对人类交通出行方式的彻底革新,它有潜力重塑我们的城市生活,使之更加便捷、高效和安全。
 一、自动驾驶硬件结构
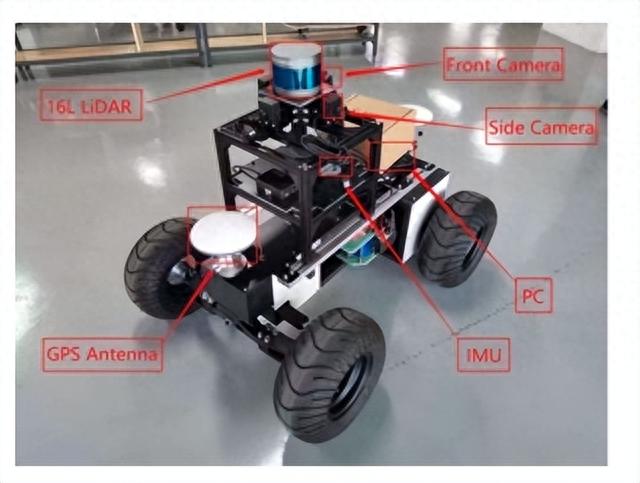
一、自动驾驶硬件结构自动驾驶系统的硬件结构既复杂又精密,主要由传感器与计算设备组成,每一部分都承载着无人驾驶汽车的关键功能。以下我们将深入探讨其组成部分。
感知子系统:
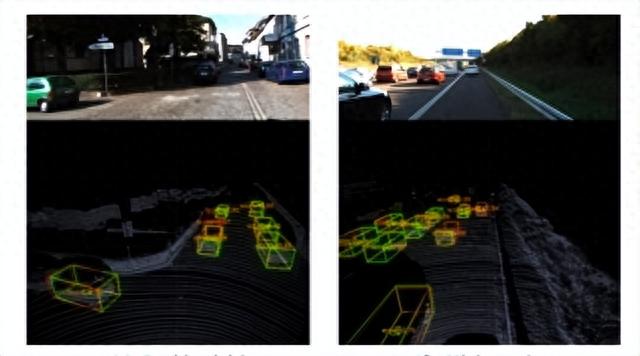
激光雷达: 通过激光的反射获取距离信息,构建物体的3D模型。虽然激光雷达可以提供高精度的距离信息,但其对环境信息的捕获相对稀疏,天气的变化也会明显影响其性能。
摄像头: 提供包括物体颜色、外形、材质等丰富的环境信息。2D计算机视觉在物体分类、信号灯检测等方面有着先进的算法。但摄像头获取的二维信息限制了距离感知的精度,并且对环境光照、天气较为敏感。
毫米波雷达: 可获取精准的距离信息,具有较强的穿透能力,能抵抗天气和环境变化的影响。但易受金属物品干扰。
定位子系统:
高精度GPS: 通过全球定位系统获取车辆的准确位置信息,通常定位精度为厘米级。
惯性测量单元 (IMU): 当GPS信号不可用时,IMU可以获取车辆在x、y、z三个方向的加速度信息,再结合感知子系统能够在无法获取GPS信号的情况下确保准确的定位。
计算设备:
高性能PC: 由于感知子系统会产生大量的观测数据,高性能PC的计算能力成为整个系统实时运行的关键。处理来自不同传感器的数据,分析环境,作出实时的驾驶决策。
以上各个部分的协同工作为自动驾驶汽车提供了周围环境的精确模型,并使其能够在复杂的道路条件下自主行驶。不过,这一系统的性能也受到一些限制。例如,激光雷达在雾霾、雨雪天气下性能下降明显;摄像头在穿过昏暗隧道时可能难以获得可靠的数据;毫米波雷达易受金属物品干扰。
总体来说,自动驾驶的硬件结构涉及了许多先进的技术和复杂的系统集成。从精确的环境感知到实时的位置定位,每一环节都需精密的计算和协调,以确保安全、高效的运行。未来的研究与发展还需解决现有技术的局限性,进一步优化系统的整体性能,使自动驾驶汽车能够在更多的环境和场景下自如驾驶。
 二、自动驾驶软件组成
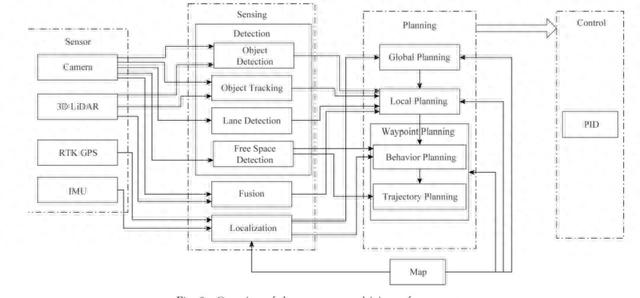
二、自动驾驶软件组成模块化的自动驾驶系统软件部分在无人驾驶领域扮演了关键角色。其由感知、决策规划、控制等子模块构成,合作确保自动驾驶车辆的安全、高效运作。以下是对这一软件结构的深入分析。
1.1 信息采集
视觉感知: 利用摄像头捕获路况、交通标志等信息,对路面物体进行识别和分类。
激光感知: 通过激光雷达获取距离信息,构建环境的3D模型。
GPS定位: 高精度GPS提供车辆在全球的精确位置信息。
1.2 信息融合
由于IMU的惯性导航精度会随着时间的增长下降,激光和视觉定位成为关键辅助工具。同时,离线地图可提供当前环境特征来进行更精确的定位。感知模块需将这些不同源的信息融合以产生更准确、稳定的感知结果。

2. 决策规划模块
2.1 导航子模块
全局路径规划: 通过车辆的当前定位信息,在静态地图上规划从起点到终点的全局路径。
局部路径规划: 根据车辆运动和周围环境的动态信息,在全局路径的基础上进一步进行局部规划,以避开环境中的动态障碍物。
决策规划模块负责将感知模块提供的环境信息转化为实际可行的驾驶路径,并持续调整以适应环境的变化。
3. 控制模块
控制模块是自动驾驶系统的执行层,负责将决策规划模块的指令转化为对车辆的物理控制,如油门、刹车、转向等。
3.1 实时控制
速度控制: 根据全局和局部路径的需求,精确控制车辆的速度。
方向控制: 根据路径规划的需求,实时调整车辆的方向。
控制模块需与感知和决策规划模块紧密协同工作,以确保车辆按计划的路径精确、平稳地行驶。
4. 持续挑战
自动驾驶系统的复杂性导致了一些持续的挑战。感知模块需要实时处理大量数据,如何高效、准确地处理这些感知数据是当前自动驾驶技术面临的关键问题之一。
结论
模块化的自动驾驶软件结构通过其精心设计的子模块,实现了对车辆的完整控制和导航。从感知环境、作出决策、执行控制,每一环节都需精确协同工作。未来的研究可能会集中在提高感知精度、增强系统的鲁棒性、降低计算复杂度等方面,以推动自动驾驶技术向更广阔的应用场景拓展。
三、自动驾驶中的感知与计算挑战
自动驾驶技术已成为交通运输领域的一项革命性创新。在探讨自动驾驶中的感知与计算挑战时,我们必须深入分析系统的各个层面。以下内容将以材料中提到的主要方面为基础,提供详细的分析。
一、感知子系统的挑战
1.1 大数据处理
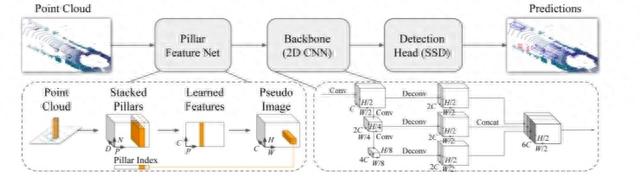
自动驾驶系统通过激光雷达、摄像头等进行大量数据采集。例如,64线激光雷达每秒产生的点云数据量高达3000KB。处理这些数据对硬件算力要求极高,同时也需求实时性和准确性的平衡。
1.2 实时性要求
如PointPillars在1080tiGPU上的执行频率达到60Hz,以及基于视觉的目标识别神经网络如YOLOv3和FastR-CNN的处理频率在10~60Hz之间。这些技术要求实时性的高效运行。
1.3 能源限制
实际车辆能为计算设备提供的能源非常有限,不能依靠强大的计算设备来满足运行要求,而需要合理分配任务和进行计算优化。
二、计算挑战
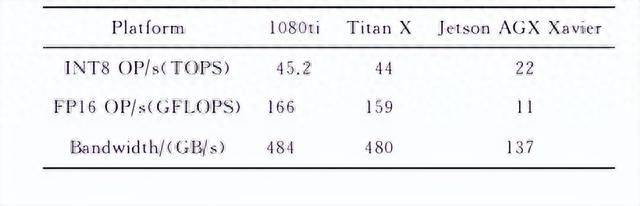
2.1 计算资源限制
车载计算设备如Jetson AGX Xavier与一般GPU如1080ti、TitanX相比,其INT8性能有所不足。在有限的计算资源下,保证实时性要求成为一大挑战。
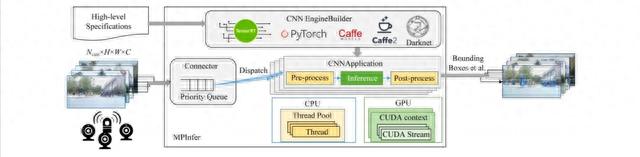
2.2 数据优化与调度
无优化、无调度情况下满足高频率处理的计算需求目前仍然是一个问题。因此,车载计算的优化是不可或缺的。
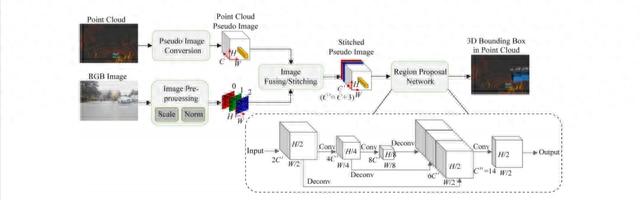
2.3 深度融合策略
为解决实时性的挑战,采用以深度融合(deep fusion)为主的框架在高层进行感知数据、模型和计算方法、调度方法的融合,以提高感知的计算时效。此外,还包括对不同感知模态的数据进行融合,以提高感知的精度。
结语:
自动驾驶中的感知与计算挑战涉及到多个领域,既包括硬件的性能限制,也包括软件算法的优化需求。感知子系统作为自动驾驶中对计算资源需求最大的部分,其挑战尤为严峻。解决这些挑战需要跨学科的协同努力,结合先进的算法、硬件设计、能源管理和数据融合策略,以实现自动驾驶的实时性、准确性和可靠性。未来的研究应更加关注这些方面的协同优化,以推动自动驾驶技术的实际应用和普及。
参考文献:
《无人驾驶技术与应用》
《无人驾驶汽车:原理、技术与法规》
《智能交通与无人驾驶》
《无人驾驶车辆设计与控制》
