一、引言
1.1 研究背景与意义在现代航空航天、军事国防以及民用交通等众多领域,精确导航技术的发展至关重要。飞行器要精准飞入目标,离不开导航系统的支持。全球定位系统(GPS)和惯性导航系统作为两种主要的导航技术,各自具有独特的优势和局限性。
GPS凭借其全球覆盖、高精度、实时定位等特性,在众多领域得到了广泛应用。无论是民用的汽车导航、航海导航,还是军事上的精确制导、作战指挥等,GPS都发挥着关键作用。然而,GPS信号易受外界环境干扰,如在高楼林立的城市峡谷、山区、茂密森林以及电磁干扰强烈的区域,信号可能会减弱、中断甚至被欺骗,从而导致定位精度下降甚至导航失效。
惯性导航系统则是一种完全自主的导航系统,它通过测量载体的加速度和角速度,利用牛顿力学原理进行积分运算,进而推算出载体的位置、速度和姿态信息。由于不依赖外部信号,惯性导航系统具有良好的隐蔽性、抗干扰性和自主性,能够在GPS信号受阻或不可用的情况下,为飞行器提供连续的导航信息。但惯性导航系统也存在固有的缺陷,其定位误差会随时间积累而逐渐增大,长期使用后精度难以保证。
将GPS和惯性导航系统相结合,形成组合导航系统,能够充分发挥两者的优势,弥补彼此的不足。这种组合导航系统在飞行器飞入目标的过程中,能够提供更可靠、更精确的导航信息,大大提高飞行任务的成功率和安全性。例如,在军事作战中,精确的导航可以确保战机准确无误地抵达目标区域,实施精确打击;在民用航空领域,能保障航班在复杂气象条件和各种环境下安全、准时地到达目的地。深入研究GPS和惯性导航系统飞入目标的相关技术,对于提升我国在航空航天、军事国防等领域的核心竞争力,具有重要的现实意义和深远的战略价值。
1.2 国外研究现状在国外,GPS与惯性导航系统的组合研究起步较早,成果丰硕。美国作为全球导航技术的引领者,在该领域投入了大量资源。美国军方在众多军事项目中广泛应用了GPS/惯性组合导航技术,显著提升了武器装备的导航精度和作战效能。例如,在战斧巡航导弹中,通过将高精度的GPS与惯性导航系统深度融合,导弹能够在复杂的战场环境中,穿越各种地形和干扰,精确命中目标,误差可控制在极小范围内。美国的一些科研机构和企业,如麻省理工学院、霍尼韦尔公司等,长期致力于惯性导航技术的研发,不断推动惯性传感器精度的提升。在激光陀螺、光纤陀螺等核心部件的研制上取得了重大突破,其产品在精度、稳定性和可靠性等方面处于世界领先水平。
欧洲在GPS与惯性导航系统的研究与应用方面也成果显著。欧盟的伽利略卫星导航系统为欧洲在全球导航领域赢得了一席之地。欧洲各国在组合导航技术的研究上注重系统性和综合性,不仅在军事领域取得了进展,还在民用航空、汽车自动驾驶等领域进行了广泛的探索和应用。在民用航空领域,空客公司的一些新型客机采用了先进的GPS/惯性组合导航系统,能够实现高精度的飞行导航,确保航班在复杂气象条件下的安全飞行,提高了飞行的准点率和乘客的舒适度。
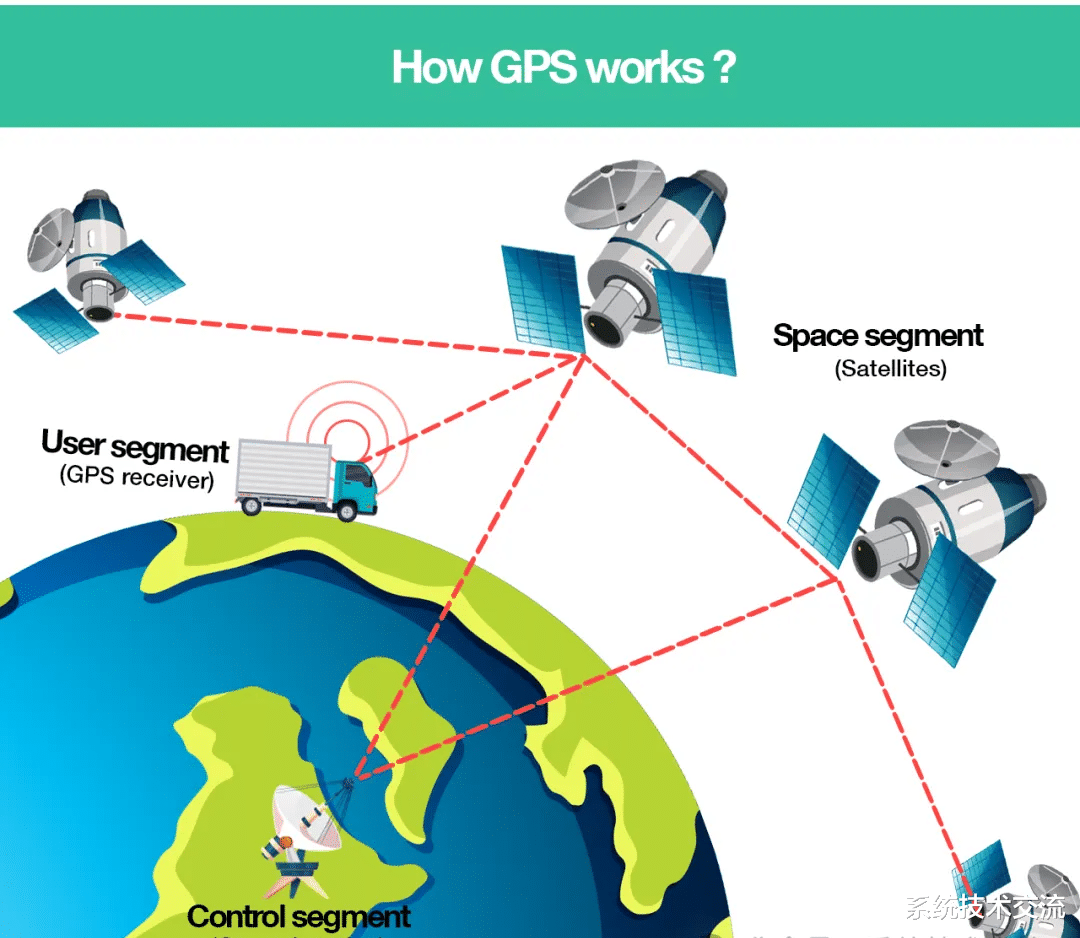
二、GPS与惯性导航系统原理剖析2.1 GPS系统工作原理2.1.1 卫星星座布局GPS系统的卫星星座由24颗卫星组成,其中21颗为工作卫星,3颗为备用卫星 。这些卫星均匀分布在6个轨道平面上,每个轨道平面上有4颗卫星。卫星轨道高度约为20,200公里,运行周期为11小时58分 。这种精心设计的布局,使得地球上任何地点、任何时刻都至少能接收到4颗卫星的信号,从而实现全球范围内的连续定位。
从覆盖范围来看,由于卫星在不同轨道平面上的分布,它们的信号能够覆盖地球的各个角落,包括高纬度地区和偏远海洋区域。在北极地区,虽然地理环境特殊,但通过不同轨道卫星信号的组合,依然可以实现较为准确的定位。这种全球覆盖的特性,使得GPS在航空、航海、陆地交通等领域都具有广泛的应用价值。例如,在远洋航行中,船只可以依靠GPS实时确定自己的位置,规划航线,确保航行安全。在航空领域,飞机在全球范围内飞行时,GPS能够为其提供准确的导航信息,保障航班的正常起降和飞行安全。
卫星星座的布局还考虑到了信号的冗余和可靠性。当某颗卫星出现故障或信号受到干扰时,备用卫星可以迅速接替其工作,确保定位服务的连续性。而且,由于至少有4颗卫星的信号可供接收,即使部分卫星信号受到一定程度的遮挡或干扰,系统仍然可以通过其他卫星信号进行定位计算,保证了定位的稳定性。
2.1.2 信号传输与定位算法GPS卫星通过发射L波段的无线电信号,向地面发送导航信息。这些信号包含了卫星的位置、时间等关键数据。卫星上搭载的高精度原子钟,为信号的时间标记提供了极其准确的基准。信号从卫星发射后,以光速传播到地面接收设备。
地面接收设备(如GPS接收机)接收到卫星信号后,首先通过相关技术捕获并跟踪卫星信号。接收机利用伪随机码(PRN)与卫星信号进行相关运算,实现对卫星信号的识别和锁定。一旦锁定信号,接收机便可以提取出信号中的时间信息和卫星轨道参数。
GPS的定位算法基于三角测量原理。通过测量至少四颗卫星信号到达接收机的时间差,结合光速,计算出接收机与每颗卫星之间的距离(伪距)。由于卫星的位置是已知的,根据这些伪距信息,利用空间几何关系,通过解算一组非线性方程组,就可以确定接收机在三维空间中的位置(经度、纬度、高度)。例如,假设有三颗卫星A、B、C,它们的位置已知,接收机接收到这三颗卫星的信号后,通过测量信号传输时间得到与卫星A、B、C的距离分别为d1、d2、d3。以这三颗卫星为球心,以d1、d2、d3为半径作三个球体,这三个球体的交点即为接收机的位置。在实际计算中,由于存在时钟误差等因素,需要引入第四颗卫星来消除这些误差,从而实现更精确的定位。
在实际应用中,为了提高定位精度,还会采用一些辅助技术和算法。差分GPS(DGPS)技术通过在已知精确位置的地面基准站上设置GPS接收机,测量基准站与卫星之间的距离误差,并将这些误差信息发送给附近的移动用户,移动用户根据这些误差信息对自身的定位结果进行修正,从而提高定位精度。载波相位测量技术则是通过测量卫星载波信号的相位变化,来获取更精确的距离信息,进一步提高定位精度,该技术在高精度测量和测绘等领域具有重要应用。
2.2 惯性导航系统工作原理2.2.1 惯性测量元件工作机制惯性导航系统的核心部件是加速度计和陀螺仪,它们如同系统的“感知器官”,精确测量载体的运动参数。
加速度计是一种能够测量物体加速度的装置,其工作原理基于牛顿第二定律。常见的加速度计利用质量块与支撑结构之间的弹性连接,当加速度计随载体一起运动时,质量块会由于惯性产生相对位移,这个位移与加速度成正比。通过测量质量块的位移,经过转换电路处理,就可以得到载体在相应方向上的加速度。例如,在一个简单的单轴加速度计中,质量块连接在一个弹簧上,当载体产生加速度时,质量块会在弹簧的作用下发生位移,传感器通过检测质量块的位移来计算加速度。现在的微机电系统(MEMS)加速度计,采用微加工技术将质量块、弹簧和检测电路集成在一个微小的芯片上,具有体积小、功耗低、成本低等优点,广泛应用于各类惯性导航系统中。
陀螺仪则用于测量物体的角速度。其工作原理主要基于角动量守恒定律。以传统的机械陀螺仪为例,它由一个高速旋转的转子和支撑结构组成。当陀螺仪绕某一轴发生旋转时,由于转子的角动量守恒,其旋转轴会保持在惯性空间中的方向不变。当载体相对于陀螺仪发生转动时,陀螺仪能够检测到这种相对转动,并输出相应的角速度信号。在现代惯性导航系统中,激光陀螺和光纤陀螺得到了广泛应用。激光陀螺利用激光在环形光路中传播时,由于载体旋转产生的萨格纳克效应,通过测量两束激光的光程差来计算角速度。光纤陀螺则是利用光纤中光的干涉原理,将光纤环绕成多匝,增加光程,提高测量灵敏度。与机械陀螺仪相比,激光陀螺和光纤陀螺具有更高的精度、可靠性和稳定性,并且没有机械转动部件,寿命更长。
2.2.2 基于运动参数的位置推算惯性导航系统利用加速度计和陀螺仪获取的数据,通过一系列复杂的数学运算,推算出载体的位置、速度和姿态信息。
在速度推算方面,对加速度计测量得到的加速度进行积分运算,就可以得到载体的速度。假设在某一时刻,载体的初始速度为(v_0),在时间(t)内,加速度计测量得到的加速度为(a(t)),那么在时刻(t)的速度(v(t))可以通过以下积分公式计算:(v(t)=v_0+\int_{0}^{t}a(\tau)d\tau)。在实际计算中,由于加速度计测量的加速度是在载体坐标系下的,而我们通常需要的是在导航坐标系下的速度,因此需要进行坐标转换。通过陀螺仪测量得到的载体姿态信息,可以确定载体坐标系与导航坐标系之间的转换关系,从而将加速度转换到导航坐标系下进行积分运算。
在位置推算方面,对速度进行二次积分,即可得到载体的位置。设初始位置为(r_0),在时间(t)内,速度为(v(t)),则在时刻(t)的位置(r(t))可以通过以下公式计算:(r(t)=r_0+\int_{0}^{t}v(\tau)d\tau)。同样,在实际应用中,需要考虑坐标转换和地球曲率等因素的影响。为了提高位置推算的精度,通常会采用一些补偿算法,对加速度计和陀螺仪的测量误差进行修正。例如,通过对加速度计的零偏漂移、标度因数误差等进行建模和补偿,减少误差对速度和位置推算的影响。
在姿态确定方面,陀螺仪测量的角速度可以用于计算载体的姿态角。常见的姿态表示方法有欧拉角(俯仰角、横滚角和偏航角)和四元数。以欧拉角为例,通过对角速度进行积分,可以得到姿态角的变化量,再结合初始姿态角,就可以确定载体在任意时刻的姿态。在实际计算中,由于陀螺仪的积分漂移误差,会导致姿态角的计算误差随时间积累。为了减小这种误差,通常会采用一些姿态融合算法,如卡尔曼滤波算法,将陀螺仪测量的角速度与其他传感器(如加速度计、磁力计等)测量的信息进行融合,以获得更准确、稳定的姿态信息。
