大家好!今天来了解一篇基于电阻抗断层扫描的柔软超薄可穿戴电子皮肤——《Extremely durable electrical impedance tomography–based soft and ultrathin wearable e-skin for three-dimensional tactile interfaces》发表于《Science Advances》。它能解决传统触觉传感器的好多问题,而且功能强大。不管是手写识别还是无人机控制,它都能轻松搞定。快来跟我一起了解一下吧!
*本文只做阅读笔记分享*
一、引言
在现代人类-机器界面(HMI)应用中,可穿戴电子皮肤(e-skin)至关重要,如在医疗、电子皮肤和机器人等领域。传统阵列结构的触觉传感器存在一些缺陷,而基于软材料和计算方法的触觉接口也有其局限性。本文介绍了一种基于电阻抗断层扫描(EIT)的柔软超薄可穿戴电子皮肤,用于三维触觉界面。

二、传统触觉传感器的问题
2.1 阵列结构的缺陷
分辨率与互连数量相关:空间分辨率的提高依赖于互连数量的增加,这会导致电气噪声增大、传感器细胞间的干扰增加以及串扰效应。
互连易受外力影响:互连暴露于外力下,容易发生机械变形,如压缩、弯曲或拉伸,导致信号噪声比降低,且单个互连的断裂可能导致整行或整列的故障。

2.2 软材料触觉接口的不足
功能有限:缺乏如多点触控能力等功能,或外部组件笨重,难以实现无缝集成。

三、EIT触觉界面的优势
互连无关的传感区域:EIT具有多点检测、损伤鲁棒性等优势,且其传感区域无需互连,减少了相关问题。
高时空分辨率:在有限的互连数量下,EIT在触觉接口中具有相对较高的时空分辨率。
稳定性:与传统系统不同,EIT基软触觉传感器在严重损坏、物理切割、极端温度或机械弯曲等情况下仍能正常运行。

四、用于HMI的软触觉映射电子皮肤
4.1 与人体皮肤的共形接触
材料组成:软触觉传感器主要由软有机材料组成,如PDMS和Ecoflex 0030混合形成的PECO(双面弹性层),以及MWCNT和PECO的纳米复合材料(活性传感区域)。
优势体现:PDMS具有良好的机械和化学强度,Ecoflex具有出色的机械柔软性,二者结合形成的PECO材料优化了性能,适用于可穿戴设备。活性传感区域具有坚韧和可拉伸的机械性能,能增强与人体的共形接触。

4.2 高时空分辨率的三维压力映射
原理:当外部压力施加在 PECO/MWCNT/PECO结构上时,近压力区域局部拉伸,MWCNTs间的互连转变为隧穿和断开,导致阻抗增加。传感器通过测量因施加压力而变化的电阻来确定力的存在和大小,通过周围电极连续测量电压信息并重建阻抗分布,进而进行信号处理,包括噪声降低、最大阻抗点检测和信号分类,最终将分类后的动态压力信息转换为HMI信息,用于手写识别和无人机控制。
五、软超薄电子皮肤的开发与分析
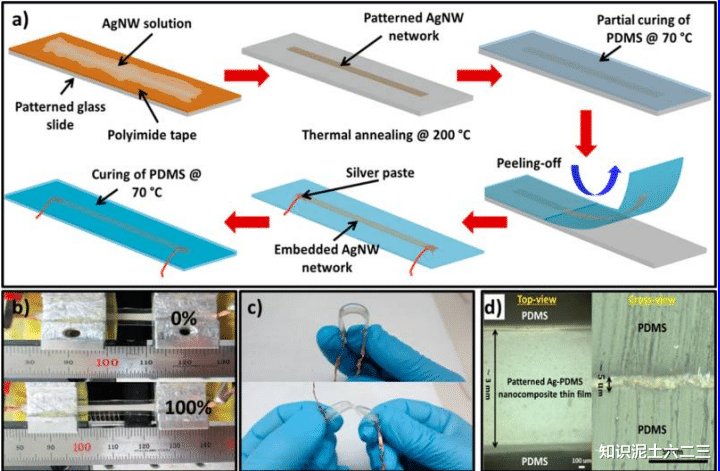
5.1 制造工艺
过程:采用微机电系统(MEMS)制造工艺,在软PECO基板上沉积SiO₂(作为临时钝化层和聚酰亚胺的粘附增强层),进行互连图案化、SU-8钝化、MWCNT微图案化(通过lift-off过程)和PECO旋涂(形成MWCNT/PECO矩阵和封装层)。

特点:可在单个基板上制造,具有良好的可扩展性和再现性,制成的超薄触觉传感器可从玻璃基板上释放并转移到软模具或人体皮肤上使用。
5.2 机械与电气特性
机械特性:应力应变测试表明,在40%应变下,施加的机械应力低于0.6 MPa;外部垂直压力测试显示,0.2 N的压力可导致高达5 mm的压缩深度,体现了设备的柔软性。通过有限元分析(FEA)研究了设备在压力条件下的响应,应力分布模拟表明了其触觉传感机制。

电气特性:MWCNT是设备的主要传感材料,具有高灵敏度,与各种弹性体混合后在应变或压力传感应用中具有良好的可用性。对设备进行电气特性测试,包括评Cu-MWCNT界面的电接触性能和通道变化,发现界面具有一致的欧姆接触和低变化。平均阻抗随压力增加呈指数增长,约为27.48%/mm,重复性测试显示具有稳定的功能。

六、EIT触觉映射接口
6.1 测量原理
通过注入交流电(i12)到相邻的两对设备中,并从周围16对相邻电极对测量电压,然后依次对所有16对电极进行同样的操作,根据电压测量响应内部阻抗的变化,从而利用 EIT 原理重建触觉信息。

6.2 映射性能
多点检测:单个细胞和周围电极可监测多个点,在不同压力水平的测试中,压力更大的区域电压变化更明显,展示了设备对同时局部压力的独立映射能力。

二维空间分辨率:能区分约1 mm间隔的压力点,分辨率约为1.7像素/mm。较大的压痕尖端可能会影响最大阻抗点的准确估计,从而影响映射分辨率。

垂直压力感知:当压力深度增加到5 mm(相当于159 kPa)时,最大重建阻抗和平均阻抗变化均上升,通过更复杂的重建过程可提高传感器的灵敏度和3D映射性能。

七、在各种恶劣环境下的映射能力
不可逆机械损伤:设备被剃须刀切割后,通过更新参考状态为损坏状态,可使压力映射恢复正常运行,展示了高可用性。

温度波动:从20℃加热到100℃时,平均阻抗逐渐降低约15%,冷却后恢复接近初始值。更新参考状态为高温状态后,可实现正常的压力检测。

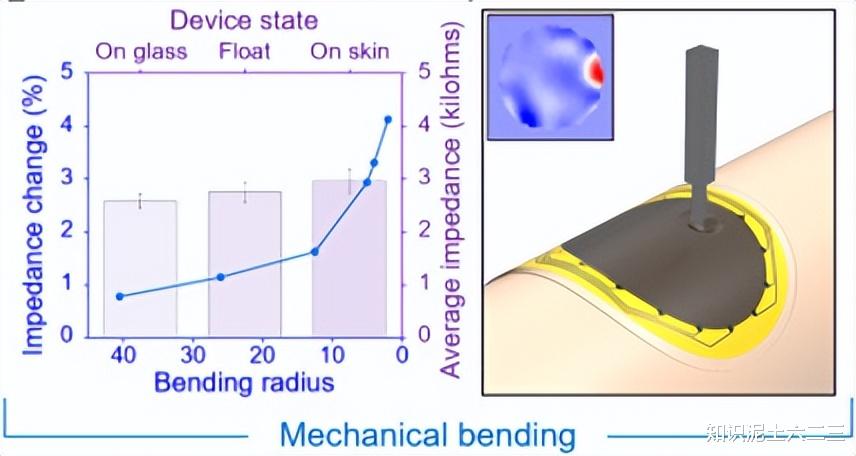
机械弯曲:当设备弯曲半径为2 mm 时,平均阻抗变化约4%,小于0.1 mm深度的垂直压力变化。在转移过程中,阻抗总体上升但电压规格稳定,弯曲后重置参考可确认压力点映射能力。
八、软触觉接口的可穿戴应用
软触觉接口能够在人体上实现共形接触和高功能性,例如在前臂上用于监测手指触摸书写。

手写识别:通过跟踪压力最大点进行手写识别,使用微调的EMNIST算法,对大写字母的识别准确率较高,经过10,000次书写测试,仍能稳定运行(准确率> 80%)。

无人机控制:将测量的压力信息转换为无人机命令,实现起飞、降落、旋转、高度变化和移动等操作。

九、大面积软电子皮肤的进一步研究
挑战:大面积EIT辅助触觉传感器的关键挑战是导电域映射性能的变化,尤其是中心性能较低。

优势:本研究的制造方法能够有效评估传感器对多点和各种压痕形状的压力感知能力,展示了独特优势。

应用测试:将大面积触觉传感器放置在人体下背部进行测试,证明其在实时HMI应用中的良好性能,有望通过计算进步进一步发展为大面积可穿戴电子皮肤。

综上所述,本文报道的基于EIT的软超薄电子皮肤 在可穿戴触觉接口中具有高性能的映射能力、良好的机械和电气特性,以及在各种恶劣环境下的稳定性,在人机交互应用中具有广阔的前景。

一起做做题吧
1、传统阵列结构触觉传感器增加互连数量会导致什么问题?( )
A. 提高分辨率
B. 电气噪声增大
C. 降低成本
D. 增强稳定性
2、基于软材料的计算方法的触觉接口往往缺乏的功能是( )
A. 多点触控能力
B. 防水功能
C. 自清洁功能
D. 快速充电功能
3、软触觉传感器中 PDMS 和 Ecoflex 0030 混合形成的材料是( )
A. PECO
B. MWCNT
C. SU - 8
D. SiO₂
4、当外部压力施加在 PECO / MWCNT / PECO 结构上时,MWCNTs 间的互连会转变为( )
A. 短路
B. 隧穿和断开
C. 电阻不变
D. 电容增大
5、软超薄 e - skin 采用的制造工艺是( )
A. 微机电系统(MEMS)制造工艺
B. 3D 打印工艺
C. 传统机械加工工艺
D. 化学蚀刻工艺
6、验证软超薄 e - skin 柔软性的测试包括( )
A. 应力应变测试
B. 高温测试
C. 防水测试
D. 电磁兼容性测试
7、EIT 的基本原理是根据材料边界的电测量推断( )
A. 材料的颜色
B. 电导率和介电常数等电特性的分布
C. 材料的硬度
D. 材料的重量
8、EIT 触觉映射接口的特点不包括( )
A. 多点检测
B. 二维空间分辨率高
C. 只能检测单一压力点
D. 垂直压力感知能力强
9、EIT 触觉传感器在极端环境下的测试不包括( )
A. 不可逆机械损伤
B. 温度波动
C. 高湿度
D. 机械弯曲
10、在温度波动测试中,从 20℃加热到 100℃时,传感器的平均阻抗会( )
A. 逐渐降低
B. 逐渐增加
C. 保持不变
D. 先增加后降低
11、软触觉接口在可穿戴应用中的具体应用不包括( )
A. 手写识别
B. 无人机控制
C. 健康监测
D. 语音识别
12、在手写识别应用中,提高识别准确率的方法可能不包括( )
A. 使用微调的 EMNIST 算法
B. 增加训练数据
C. 更换传感器材料
D. 优化信号处理算法
13、大面积 EIT 辅助触觉传感器的关键挑战是( )
A. 导电域映射性能的变化,尤其是中心性能较低
B. 成本过高
C. 制造工艺复杂
D. 重量过大
14、文章中展示的大面积触觉传感器的测试场景是( )
A. 人体下背部
B. 手掌
C. 头部
D. 腿部
参考文献:
Kim K, et al. Extremely durable electrical impedance tomography-based soft and ultrathin wearable e-skin for three-dimensional tactile interfaces. Sci Adv. 2024 Sep 20;10(38):eadr1099.
