大家好!今天我们来了解一种光和电激活的水凝胶——《Autonomous hydrogel locomotion regulated by light and electric fields》发表于《SCIENCE ADVANCES》。在科技的广袤天地里,机器人技术不断发展,但传统机器人面临诸多局限。而生命现象中,生物能凭借自身特性在复杂环境中巧妙生存。本研究致力于开发一种光和电激活的水凝胶,它仿佛拥有生命的智慧。那么,这种水凝胶究竟如何在光场和电场的作用下,实现自主运动、捕获货物以及避开障碍呢?让我们开启这场探索之旅。
*本文只做阅读笔记分享*

一、研究背景与意义
软物质在机器人应用中具有潜力,但传统软机器人材料在执行复杂任务时存在局限,如需要分步控制或编程刺激,且难以在恒定刺激下持续工作。而许多生物行为能在恒定刺激下持续运作,受此启发,本研究旨在设计一种光和电激活的水凝胶,使其在简单恒定刺激下实现自主功能,如捕获和运送货物、避障及返回等。
二、螺吡喃功能化聚合物的电荷反转
(一)实验设计
本研究采用两种不同净电荷的螺吡喃分子,一种可从带正电的MCH+转变为中性SP,另一种含磺酸基团,从两性离子MCH+(SO3-)转变为带负电的SP(SO3-)。将这些螺吡喃分子通过可聚合的甲基丙烯酸酯基团合成螺吡喃-PNIPAM聚合物,然后将不同比例的螺吡喃分子掺入N-异丙基丙烯酰胺(NIPAAm)聚合物链中。例如,在制备过程中,将NIPAAm、交联剂MBAAm、螺吡喃分子等溶解在特定溶剂中,通过自由基聚合形成水凝胶前体,再经过浸泡等处理得到最终的水凝胶膜。

(二)实验结果
1、ζ-电位测量
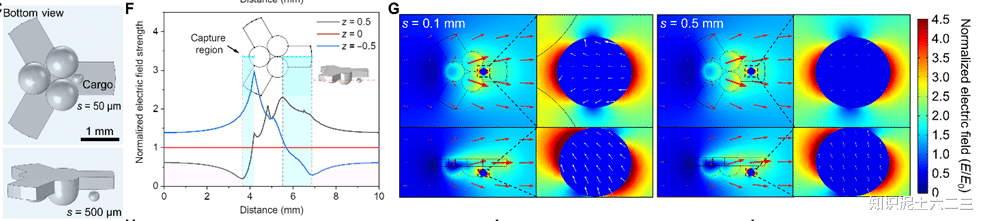
空白PNIPAM的ζ-电位在光照前后几乎为零。而螺吡喃-PNIPAM聚合物表现出光控ζ-电位和电荷反转行为。对于含有两种不同螺吡喃部分的SP/SP(SO3-)系统,随着SP(SO3-)含量增加,Δζ变小。这是因为带负电的磺酸基团增加了聚合物的水动力半径,降低了表面电荷密度。
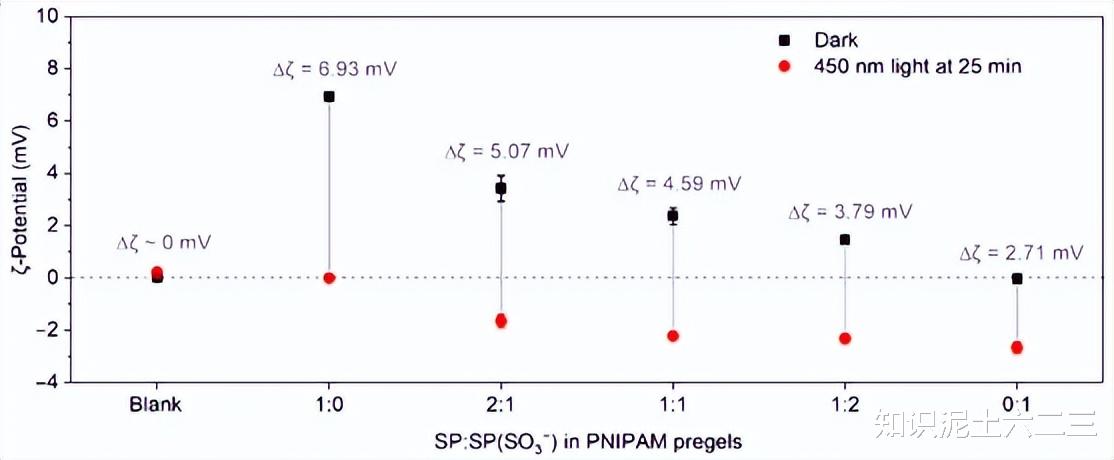
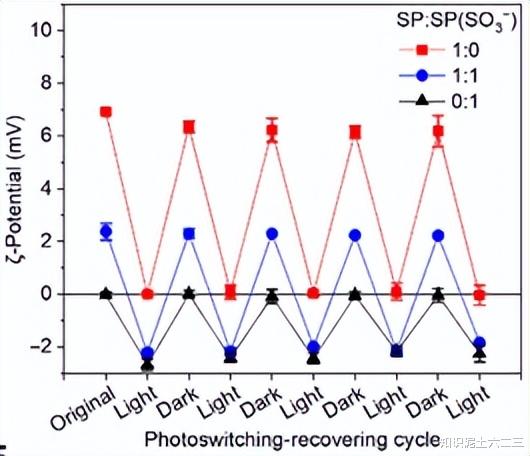
光开关完全可逆,在五个光-暗循环中,SP、SP(SO3-)和SP/SP(SO3-)功能化聚合物在黑暗中孵育2小时后可恢复初始电荷状态。
2、电荷反转时间调节
虽然ζ-电位值与表面电荷密度有关(取决于水动力半径),但对于不同螺吡喃比例的聚合物,其可切换电荷的密度在恒定摩尔浓度和切换速率下是相同的。通过计算不同光照时间和黑暗恢复时间后螺吡喃-PNIPAM聚合物的归一化ζ-电位ζ/Δζ来描述系统的电荷密度。

由于SP和SP(SO3-)的酚基pK值相似且环闭合动力学相同(由归一化ζ-电位曲线的衰减率表明),所以可以通过改变两种螺吡喃部分的比例来调节电荷反转时间,而不改变切换和恢复速率。

三、螺吡喃-PNIPAM水凝胶的光控电活性运动
(一)实验设计
以N,N’-亚甲基双丙烯酰胺(MBAAm)为交联剂制备螺吡喃-PNIPAM水凝胶。在直流电场下,利用螺吡喃-PNIPAM聚合物的电荷反转行为,通过光照使水凝胶网络中的质子化部花青异构化为螺吡喃,从而改变水凝胶的电荷状态,实现自主运动。例如,在实验装置中,将水凝胶置于电场中,从底部用特定波长和强度的光照射水凝胶,观察其运动情况。

(二)实验结果
1、运动速度变化
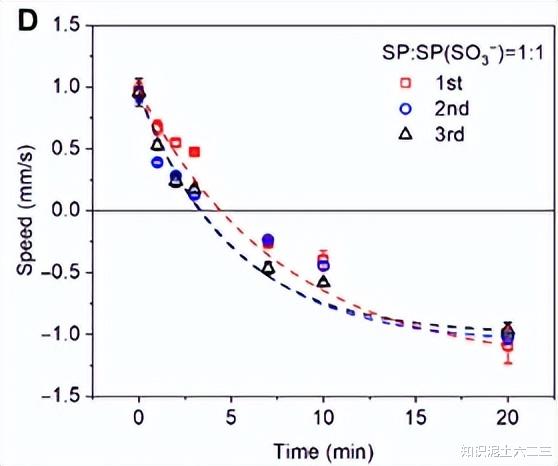
不同SP/SP(SO3-)比例的水凝胶在多个光照-黑暗周期中的运动速度变化不同。在前三轮光-暗周期(光照4分钟,黑暗9分钟)中,1:0和1:1 SP/SP(SO3-)水凝胶的运动速度下降,而水凝胶在光照和黑暗期间运动速度均增加,这表明存在光和pH驱动的MCH+和MCH+ (SO3-)去质子化的耦合。

通过测量无光照时水凝胶的运动速度,发现pH驱动的异构化在光照射期间不主导电荷极性和运动行为。例如,在最初的10-15分钟内,1:0和1:1 SP/SP(SO3-)水凝胶速度下降,0:1样品向阳极加速,表明正电荷损失或去质子化。转移到去离子水20分钟后,水凝胶运动速度恒定, 1:1 SP/SP(SO3-)样品未反转方向,仍带正电,这与之前报道的螺吡喃部分在水凝胶中的pH驱动异构化不完全的结果一致。

2、运动速度与电荷密度关系
水凝胶的运动速度与ζ-电位平方根成正比(由公式EQ=ρv2CDA推导),且随光照时间呈指数衰减,这与归一化ζ-电位随光照时间的指数衰减趋势相似。这表明聚合物的凝胶化和水凝胶与溶液之间的离子交换对光调节-电位的动力学影响可忽略不计,水凝胶的流体动力学和电活性运动遵循上述关系。

较高的施加电压和较大直径的水凝胶盘会导致更高的运动速度,但直径较大的水凝胶盘在光照下更容易弯曲,因为螺吡喃水凝胶存在光收缩或膨胀行为。直径为2mm的水凝胶盘能更好地保持几何形状,更适合研究运动速度。

3、电荷恢复与循环性能
水凝胶的电荷在5mMHCl中黑暗放置2小时后可完全恢复,且在三次光照-恢复循环后,运动性能没有下降的迹象。
四、货物的捕获和运送
(一)实验设计
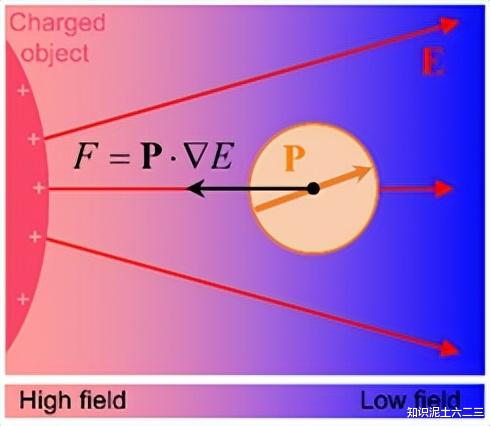
利用带电水凝胶在周围介质中产生局部不均匀电场,通过介电泳(DEP)力吸引高介电常数(高-k)材料,实现货物捕获和运送。设计了简单盘状和三臂状螺吡喃-PNIPAM水凝胶,制备了含BaTiO3纳米颗粒的PNIPAM水凝胶球作为高-货物,研究水凝胶对货物的捕获和运送能力。例如,在实验中,将高-货物放置在水凝胶的运动路径上或周围,观察水凝胶在电场和光照下对货物的作用。
(二)实验结果
1、盘状水凝胶捕获货物
盘状1:1 SP/SP(SO3-)水凝胶能够捕获放在其直线运动路径上的高-k货物(直径0.75mm的BaTiO3纳米颗粒嵌入PNIPAM水凝胶球),这是由于DEP力的作用,货物会附着在带电水凝胶上。
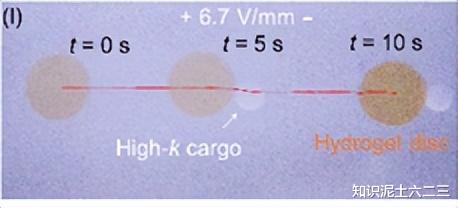
当高-k货物不在水凝胶的预期直线运动路径上时,强大的DEP力也能使水凝胶自主搜寻并捡起货物。
然而,如果高-k货物离带电水凝胶较远(如表面-表面距离s>0.3mm),则无法被捕获。

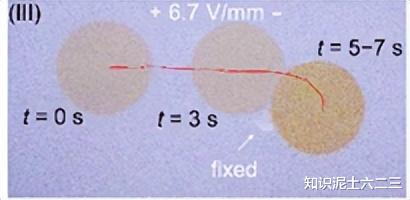
有限元模拟表明,由于带电水凝胶产生的电场与外加电场叠加,在水凝胶与同极性电极之间的区域平均电场强度较低。在近乎中性条件下,反离子浓度低,带电水凝胶表面电场增强,形成指向水凝胶的电场梯度(定义为“捕获区域”)。当高-k颗粒在捕获区域时,颗粒极化增强周围电场,电场梯度产生吸引力DEP力,但盘状水凝胶的捕获区域电场梯度随距离增加急剧减小,无法在远距离产生强大DEP力。

2、三臂水凝胶捕获货物
三臂水凝胶设计(含半球形腿和悬臂臂,臂下有容纳货物的空腔)增强了捕获区域的电场梯度,使其更容易捕获高-k货物。
有限元模拟计算了不同位置(如悬臂臂下P1位置和半球形腿P2位置)的高-k颗粒所受DEP力与距离s和归一化BaTiO3-电位z的关系。

实验制备了三臂螺吡喃-PNIPAM水凝胶对象,结果显示1:1 SP/SP(SO3-)水凝胶在正常电场下能在臂端P1位置吸引并捕获货物,在P2位置的货物需电场达到10V/mm才能被捕获,这与有限元计算结果相符。

水凝胶在电荷反转后仍能吸引高-k货物,并在返回阳极时将其运送回去。这归因于悬臂臂下较大的捕获区域和增强的电场梯度,这是盘状水凝胶无法实现的。
3、货物释放
有限元计算表明,当水凝胶不带电时(z=0),周围电场梯度消失,实现自主货物释放。例如,1:1 SP/SP(SO3-)三臂水凝胶在光照约4分钟后停止运动,此时静电引力小于水凝胶与基底间的摩擦力,电荷密度接近零,货物释放。随着电荷变为负电,水凝胶开始返回,但初始电荷反转时负电荷量小,无法产生足够DEP力携带货物,货物留在阴极附近。对于在返回途中捕获的货物,由于水凝胶电荷反转后负电荷量持续增加,无法自主释放,可通过关闭电场实现释放。
五、自主避障
(一)实验设计
利用低介电常数(低-k)材料对相邻带电水凝胶产生排斥电泳力,通过有限元计算研究电场线分布,设计实验验证水凝胶对低-k和高-k(金属)障碍物的响应。例如,在实验中,将低-k或高-k障碍物固定在样品槽中,观察水凝胶在恒定电场和光照下的运动轨迹。

(二)实验结果
1、低-k障碍物实验
有限元计算表明,低-k障碍物会排斥电场线,电场向量可引导带电水凝胶绕过障碍物。
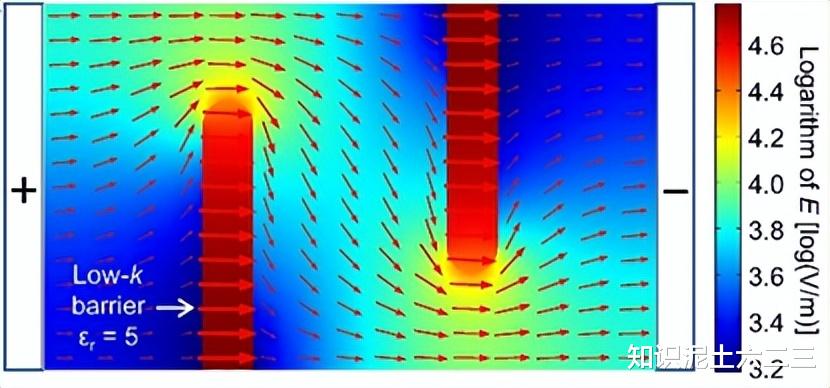
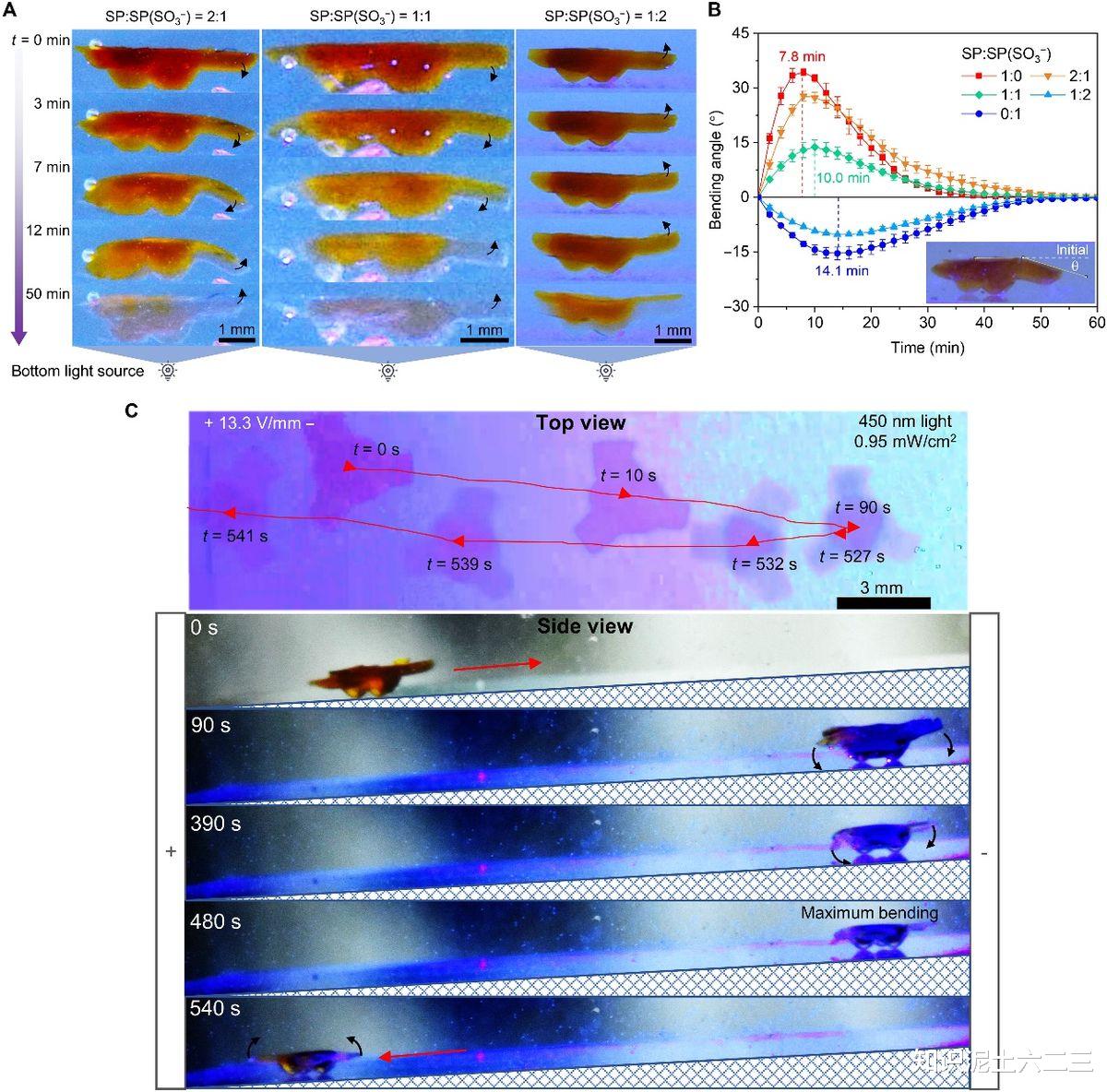
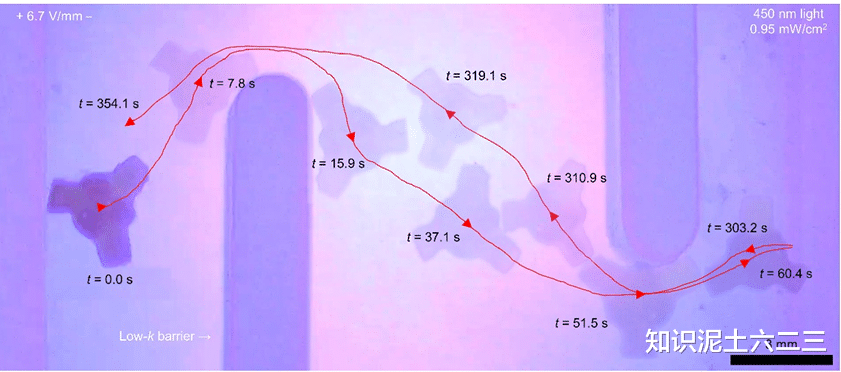
实验中,两个3D打印的低-k障碍物(相对介电常数约为5的甲基丙烯酸树脂)固定在玻璃基底上形成s形路径,SP/SP(SO3-)机器人状水凝胶对象在恒定电场和光照下可自主绕过障碍物并在电荷反转后返回,无需人工干预。
2、高-k障碍物实验
高-k障碍物(如金属,介电常数近乎无穷大)会吸引电场线,电场向量会将带电物体推向障碍物。

当用铜箔包裹低-k障碍物制备高-金属障碍物时,施加电场后,水凝胶会被障碍物吸引并粘附在相邻金属表面,这与计算的电场向量结果一致。
六、研究总结与展望
本研究设计的光和电激活水凝胶能够在简单恒定外部刺激下实现货物捕获和运送以及避障等自主功能。通过在水凝胶中掺入不同比例的两种螺吡喃部分,实现了光调节的电荷反转和电活性运动。利用DEP效应实现了高-k货物的自主捕获和运送,利用电场对低-材料的响应实现了自主避障。与之前的软机器人系统相比,本水凝胶的运动不依赖特殊基底表面特征,光强较低、功耗小,且电场具有环境敏感性,为软机器人提供了避障能力。未来,这种基于环境敏感静电相互作用和光驱动协同作用的自主功能开发,有望在人类监测和干预不安全或不实际的场景中得到应用,如在纳米或微机器人用于细胞操作等领域发挥重要作用。
七、一起来做做题吧
1、以下关于螺吡喃 - PNIPAM 聚合物的ζ- 电位变化说法正确的是( )
A. 空白 PNIPAM 在光照后ζ-电位显著增加
B. 含较高SP(SO3-)含量的螺吡喃 - PNIPAM 聚合物Δζ较大
C. 螺吡喃 - PNIPAM 聚合物的光开关不可逆
D. 不同螺吡喃比例的聚合物可切换电荷密度在恒定条件下相同
2、电荷反转时间可通过什么方式调节( )
A. 改变光照强度
B. 改变溶液 pH 值
C. 改变螺吡喃分子的pK值
D. 改变两种螺吡喃部分的比例
3、在螺吡喃 - PNIPAM 水凝胶的光控电活性运动实验中,1:1 SP/SP(SO3-)水凝胶在第三个光-暗周期中的运动情况是( )
A. 运动速度持续增加
B. 运动速度持续下降
C. 先运动后停止
D. 保持静止
4、水凝胶运动速度与以下哪个因素成正比( )
A. ζ-电位
B. ζ-电位的平方根
C. 电场强度的平方
D. 水凝胶的直径
5、盘状1:1 SP/SP(SO3-)水凝胶对高-k货物的捕获情况,以下说法正确的是( )
A. 能捕获任意距离的高-k货物
B. 对不在直线运动路径上的高-k货物无法捕获
C. 捕获区域电场梯度随距离增加变化不大
D. 当高-k货物离水凝胶较远(s > 0.3mm)时无法捕获
6、三臂水凝胶相比盘状水凝胶在捕获高 - 货物方面的优势在于( )
A. 能产生更强的 DEP 力
B. 捕获区域电场梯度不随距离变化
C. 悬臂臂下的设计增强了捕获区域电场梯度
D. 对所有货物都能更快速地捕获
7、低-k障碍物对带电水凝胶的作用是( )
A. 吸引水凝胶靠近
B. 对水凝胶运动无影响
C. 排斥电场线,引导水凝胶绕过
D. 使水凝胶停止运动
8、当遇到高-k金属障碍物时,水凝胶会( )
A. 自主避开
B. 被吸引并粘附
C. 改变运动方向但不靠近
D. 不受影响继续运动
参考文献:
Yang Yang et al. ,Autonomous hydrogel locomotion regulated by light and electric fields. Sci. Adv.9,eadi4566(2023).
