大家好!今天我们来了解 “用于软体机器人的高度集成多材料纤维” 这一研究——《Highly Integrated Multi‐Material Fibers for Soft Robotics》发表于《Advanced Science》。软体机器人在医疗等领域潜力巨大,但传统制造技术存在局限。本研究聚焦热拉伸工艺,通过选择如聚碳酸酯、SEBS 等多种材料,结合独特设计,制造出具有多种功能的纤维。这些纤维不仅能实现复杂运动,还具备感知环境、输送流体等能力,为软体机器人的发展带来新的突破。
*本文只做阅读笔记分享*
一、研究背景与目标
软体机器人在微创医疗等领域具有巨大潜力,但传统制造技术面临诸多挑战。热拉伸工艺虽常用于光纤制造,却未在软体机器人领域充分发挥其潜力。本研究旨在利用热拉伸工艺制造具有多种功能的软体机器人纤维,实现小尺寸、高长径比以及复杂设计与多功能集成。
二、材料、工艺及设计
(一)材料选择
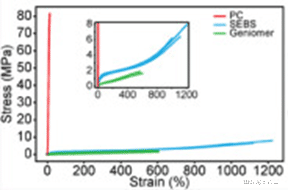
研究了聚碳酸酯(PC)、苯乙烯-(乙烯-共-丁烯)-苯乙烯嵌段共聚物(SEBS)和Geniomer三种聚合物。它们都具备适合热拉伸的流变学特性,但机械性能各异。例如,PC表现出线性应力-应变曲线,模量高、断裂伸长率低;SEBS和Geniomer则为非线性行为,更软且更易变形。综合考虑,SEBS因具有良好的流变行为、相对低的表面张力以及合适的机械性能,被选作主要材料。

(二)热拉伸工艺
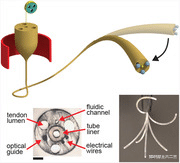
热拉伸工艺是将宏观材料预制件在热和张力作用下转化为纤维。在这个过程中,预制件的横截面设计得以保持并按比例缩小。预制件可通过压缩成型制造出复杂几何特征,如孔洞可在纤维中形成微通道。多种材料能在预制件组装时结合,并且通过进料机制还可集成一维元件,如光导或金属丝。

(三)纤维设计
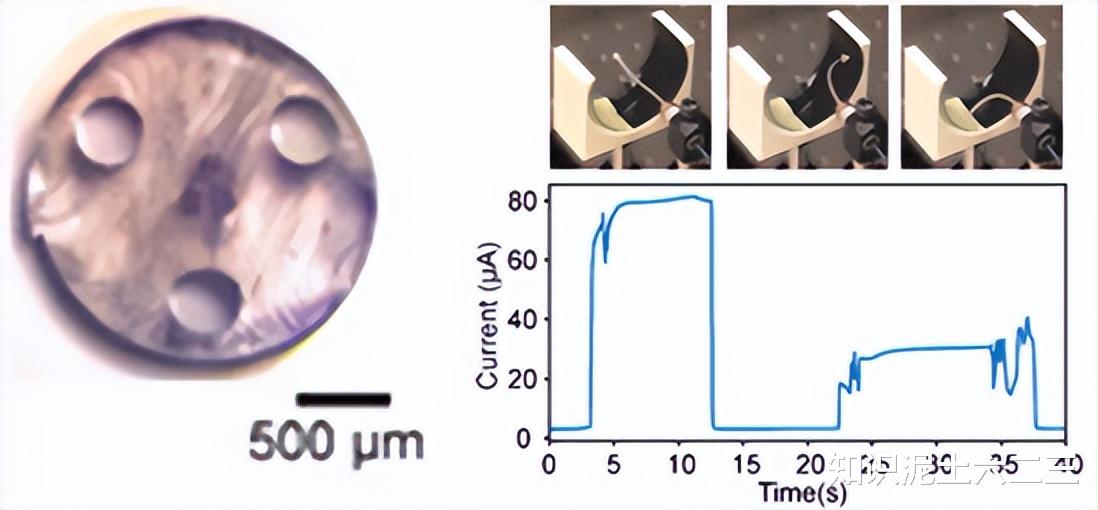
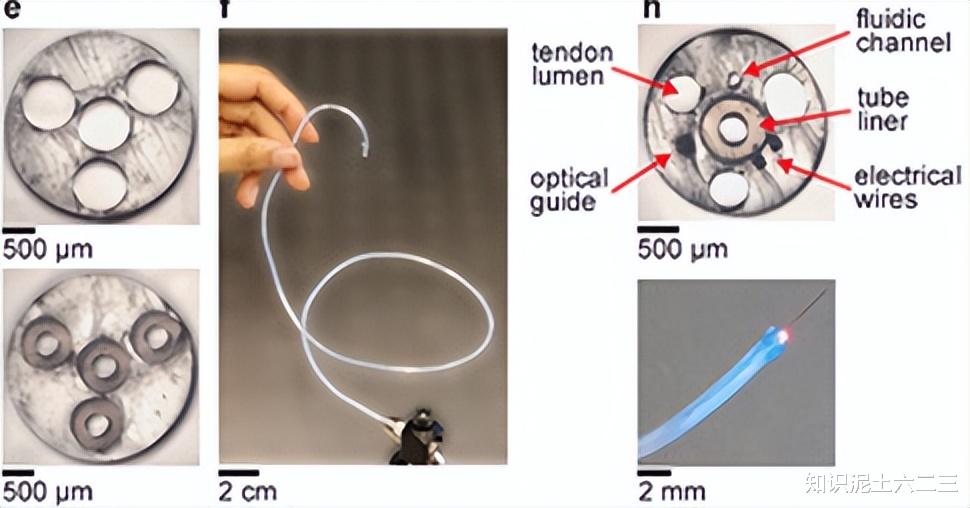
探索了多种纤维设计,包括不同的内部结构和功能元件集成。纤维直径可达700μm,长径比达103,内部可集成如肌腱、光导、电线和微流体通道等多种元件。所有纤维设计都集成了三个容纳肌腱的腔,肌腱由尼龙线或金属丝构成,直径为70-200μm。为确保肌腱在腔内自由移动且摩擦最小,引入了乙醇作为润滑剂。
三、性能测试与分析
(一)力学性能测试
通过拉伸测试分析材料的应力-应变曲线和机械性能。PC作为热塑性材料较硬,而SEBS和Geniomer这两种热塑性弹性体较软且更易变形。软材料在低激活力下可实现大弯曲角度,这在生物医学应用中具有优势,可降低对组织的损伤风险。
(二)驱动性能测试
使用集成肌腱驱动机制测试纤维弯曲时的阻塞力。PC纤维产生的阻塞力最大,可达66.3mN,SEBS和Geniomer纤维产生的力较小,分别为2.7mN和1.3mN。输出力受材料弹性模量和肌腱与支撑腔之间的摩擦影响,本研究通过在腔体内使用乙醇可降低摩擦。

四、功能验证
(一)运动控制
1、控制单元与模型
设计了包含伺服电机、微控制器和计算机的外围控制单元,基于运动学模型实现对纤维的控制。运动学模型将软体机器人的高维空间简化为三维配置空间或任务空间。

2、运动验证
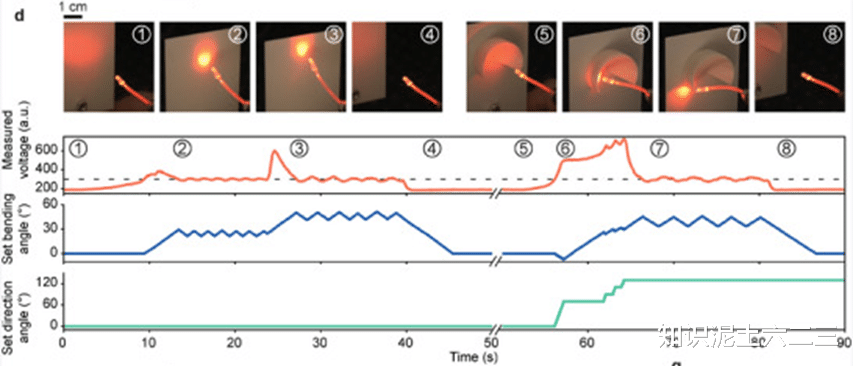
一维运动:在一维实验中验证了逆运动学,纤维能紧密跟随设定的弯曲角度斜坡,满足恒定曲率近似。

二维运动:通过改变弯曲方向和角度验证二维控制。例如,使用带有光导的纤维设计,成功实现将光投射到空间定义区域,并自动执行轨迹,追踪预定义字母形状。

增加自由度:介绍了两种增加自由度的策略。一种是改变横截面结构,增加腔的数量,使两组肌腱分布在结构中;另一种是在较大的纤维内引入较细的纤维,增加平移自由度。

(二)环境感知
1、光纤位移传感
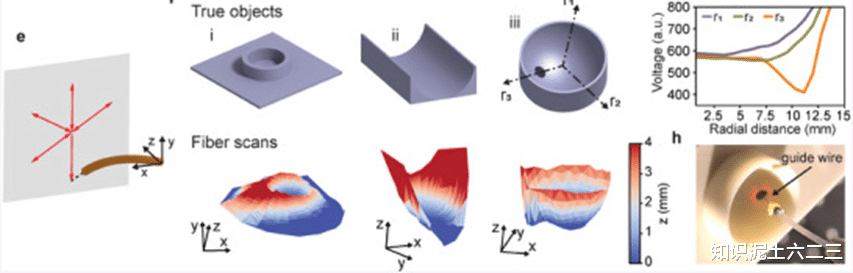
通过光纤位移传感实现对外界环境的感知。传感器配置包括连接光源和光探测器的光导,反射光强度随距离变化,在一定波长下可实现亚毫米分辨率的距离量化。

2、避障与空间重建
避障实验:将接近度作为外感受反馈引入控制回路,实现自动避障。在实验中,当障碍物接近时,纤维根据反射光强度调整自身配置,成功避免碰撞并在障碍物移除后恢复初始位置。
三维空间重建:利用接近信号和已知的纤维配置重建三维空间环境。通过对不同几何形状物体的扫描实验,验证了重建的准确性。
(三)多功能验证
1、电刺激与记录功能
纤维可集成金属丝实现电刺激和记录功能。通过连接在近端的静电计和暴露在远端的金属丝,可对接触的导电表面进行电特性探测。例如,对不同导电率的水凝胶进行测试,纤维能准确弯曲并与样品建立稳定的电接触,测量的电流与样品的导电率相符。
2、流体输送功能
集成微流体通道可实现流体输送或抽吸功能。通过连接在近端的泵,可控制纤维移动并准确地对空间分布的小瓶进行流体操作。

3、微创医疗应用示例
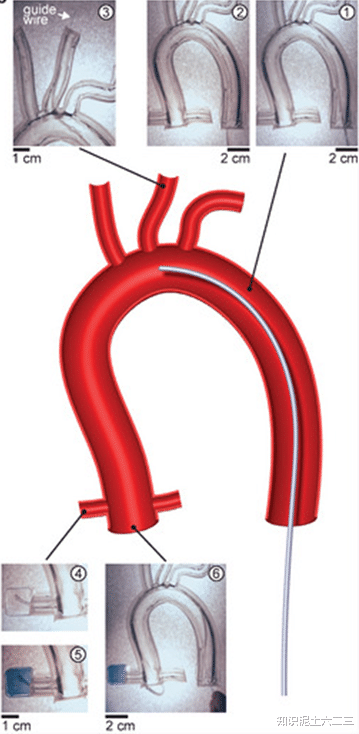
在微创医疗应用中,展示了纤维在模型主动脉弓中的导航、放置导丝和输送流体等能力。通过在热拉伸步骤中集成聚四氟乙烯(PTFE)衬里,制造出具有软尖端和硬主体的纤维。在实验中,纤维能在模型中手动推进,尖端可根据需要转向,完成放置导丝和向特定位置输送流体等任务。
五、制造过程
(一)预制件制造
热塑性弹性体(SEBS、Geniomer)的预制件通过在定制钢模具中压缩成型制造,在0.5bar、180°C下压缩12h。PC预制件则通过3D打印制造。
(二)热拉伸过程
使用定制拉伸塔在特定温度和速度下将预制件拉伸成纤维。对于SEBS,温度为200°C;对于Geniomer,温度为240°C;对于PC,温度为250°C。进料速度为1mm/min,收线速度在100-900mm/min之间,直径缩小比例为10-30。对于含功能元件的纤维,使用进料机制集成元件,在拉伸过程中,进料元件会被流动的包层材料捕获并连续展开。
(三)后处理
纤维切割成合适长度后,通过溶剂(如甲苯)或机械处理暴露肌腱和其他功能元件。一端通过打结或使用环氧树脂固定肌腱,另一端将肌腱和其他功能元件与控制单元连接。对于集成PTFE衬里的纤维,在远端通过机械方式去除部分衬里,形成软尖端和硬主体。最后在纤维尖端施加乙醇作为润滑剂,多余的乙醇用纸巾去除。
六、研究结论
本研究表明热拉伸制造的微结构纤维为软体机器人提供了高长径比和多种先进功能。展示了多种材料选择和不同的纤维设计,通过肌腱驱动机制实现复杂运动,嵌入多种元件实现多功能。纤维在微创医疗中具有感知、成像和自适应环境的能力,可探测电特性、输送流体和工具。
七、一起来做做题吧
1、软体机器人在以下哪个领域具有潜在应用优势?
A.重型工业制造
B.微创医疗手术
C.航空航天飞行控制
D.深海探测
2、在材料选择中,以下哪种材料因综合性能优势被选作主要的软体机器人纤维材料?
A.聚碳酸酯(PC)
B.苯乙烯-(乙烯-共-丁烯)-苯乙烯嵌段共聚物(SEBS)
C.Geniomer
D.以上都不是
3、在驱动性能测试中,哪种材料的纤维产生的阻塞力最大?
A.聚碳酸酯(PC)
B.苯乙烯-(乙烯-共-丁烯)-苯乙烯嵌段共聚物(SEBS)
C.Geniomer
D.无法确定
4、在运动控制中,为增加纤维的自由度,以下哪种不是文中提到的策略?
A.改变横截面结构增加腔的数量
B.提高纤维材料的弹性模量
C.在较大纤维内引入较细的纤维
D.以上都不是
5、热塑性弹性体(SEBS、Geniomer)的预制件是通过以下哪种方式制造的?
A.3D打印
B.在定制钢模具中压缩成型
C.热拉伸
D.注塑成型
参考文献:
Leber A, et al. Highly Integrated Multi-Material Fibers for Soft Robotics. Adv Sci (Weinh). 2023 Jan;10(2):e2204016.
