
文|大核有料
编辑|大核有料
火力发电占全国总发电量的70%左右,锅炉是火力发电中的核心装备,为了减少锅炉水冷壁炉管因壁厚减薄而产生的爆管停炉等事故,需要定期进行检测。
目前通常是人工手持测厚仪进行检测,存在劳动强度大、作业难度大、效率低、易出现漏检及危险性高等问题,开发一款炉管壁厚检测机器人是检测技术发展的需要。

由于水冷壁通常高达30米以上,过长的电缆不仅影响爬壁稳定性,且增加经济成本和人工成本,因此无缆化是壁厚检测机器人的发展方向之一。
高空作业,需要保障电池电量,防止因电量不足导致机器人停留在半空中或掉落等事故发生,对于壁厚检测机器人电池剩余电量研究具有重要意义。

相关研究人员采用物理和数据融合的方法基于一阶RC等效电路对锂电池进行荷电状态估计;采用扩展卡尔曼滤波算法通过构建一阶RC等效电路完成了电池剩余电量估算研究;通过一阶RC等效模型完成了对钛酸锂电池的荷电状态估计。
通过对比一阶RC模型和二阶RC模型表明在复杂工况下二阶RC模型有更高的精度。

但由于壁厚检测机器人复杂的工况条件,在工作时,该如何防止机器人出现因电量不足还继续运行的情况,从而提高机器人的安全性呢?
«——【·壁厚检测机器人电源·】——»
壁厚检测机器人的供电结构由控制部分和动力部分组成。控制器是控制电路的主要负载,电机模块和照明模块是动力电路的主要负载。
为了保证主控芯片持续安全稳定运行,采用双电源构架,不间断电源(uninterruptedpowersupply,UPS)直流供电方式,为控制器不间断供电,实现强电弱电分离。
供电系统框图如图1所示。

由于锂电池具有高能量密度和循环寿命,能满足机器人的续航能力和运行稳定要求,因此选择低成本和安全性高的磷酸铁锂电池作为主电源和UPS电源。
«——【·磷酸铁锂电池模型·】——»
电池等效电路模型:由于电池的一些参数如功率和容量等无法直接测量,因此需要建立电池模型,用抽象的数学公式模拟电池的真实特性。

锂电池发展至今,经典的模型分为3类:电化学机理模型、神经网络模型及等效电路模型。
由于等效电路模型对动力电池的不同工作状态有较好的适用性,并且相对于一阶RC等效模型,二阶RC等效模型能更加精准的模拟电池的电压变化。
因此选用二阶RC等效模型建模,如图2所示。

图中:R1、R2为极化电阻,C1、C2为极化电容。该电路模型满足基尔霍夫电压定律,电路方程如式(1):

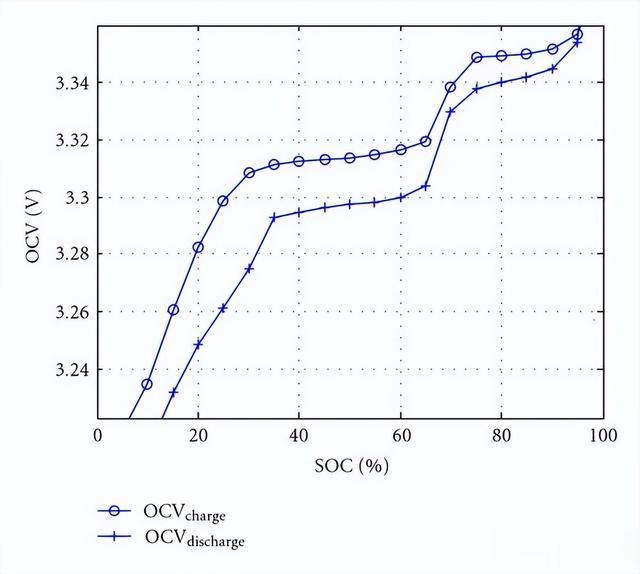
开路电压(opencircuitvoltage,OCV)分析:荷电状态(stateofcharge,SOC)是对电池容量的相对性描述,是判断电池性能的重要指标,SOC越高,电池使用寿命越长。
定义公式为:

电池放电易受到温度的影响,通过对不同温度电池电压测量得到电池放电曲线,如图3所示。

由图可知在相同放电倍率下,温度越低电压下降越快,最大放电容量减少。
文中采用美国马里兰大学LFP锂电池公开数据集作为实验基础数据,该数据集在不同温度下对电池进行充放电实验。
引入温度变量,以修正温度对OCV产生的影响,高阶函数拟合结果表现较好,但方程过于复杂,不利于后续计算仿真,应在满足较高阶数的前提下满足计算要求。
基于此原则,由于SOC与OCV之间非线性较强,采用5阶多项式拟合;温度与OCV非线性程度较小,采用3阶多项式拟合。
得到OCV与SOC和温度的函数关系如式(3)。

式中:温度和SOC为自变量,OCV为因变量,pij为多项式拟合得到的参数,其值如表1所示。

使用Matlab工具得到函数关系曲面如图4所示。

«——【·模型仿真验证·】——»
参数辨识:Simscape是Matlab/Simulink中针对物理环境开发的仿真系统,包含机械、流体、热学、电学等多物理场实验。
基于二阶RC等效模型,利用Simscape仿真环境搭建壁厚检测机器人二阶等效电路仿真模型,如图5所示。

电路中各参数会受SOC值的影响,将SOC按0%~100%区间11等分,目标是获取SOC的参数值。
将当前的Simscape模型中欧姆电阻R0、极化电阻R1、R2和极化电容C1、C2设为定值,利用参数估计(parameterestimation,PES)工具,完成对设定参数的自动辨识。

设置损失函数为最小均方误差,通过不断比较仿真电压和真实电压之间的差异,在每次迭代中动态调整模型参数,使损失函数降至最低,获取局部最优解。
在不同的温度下重复以上步骤,得到关于SOC和温度的参数,将数据保存后,在二维LookupTable模块中调用。通过对Simscape的电路逻辑搭建和PES的参数辨识,磷酸铁锂电池模型构建完成。
表2为25℃时参数的辨识结果。

模拟工况验证:验证模型的有效性,需要用电池工况数据进行模型数据与实际数据对比分析。
由于壁厚检测机器人工作环境比较复杂,简单的恒流实验并不能模拟实时电流的工作状态,需要选择其他工况验证。

由于FUDS工况电流的跳变更加剧烈,能够很好的检测出模型的精度和鲁棒性,因此用FUDS工况对模型进行验证。
将FUDS工况的电流数据输入模型,将模型仿真得到的电压与实测电压进行对比,结果如图6所示,可以看出仿真端电压和实测端电压变化趋势近似,能较好的模拟电池放电情况。

«——【·SOC估算实验·】——»
扩展卡尔曼滤波算法:卡尔曼滤波算法(Kalmanfiltering,KF)主要解决线性系统问题,对于磷酸铁锂电池的非线性系统状态建模,需要对系统状态方程和输出方程通过一阶泰勒多项式展开进行线性化处理。
在原有的KF进行扩展得到扩展卡尔曼滤波算法(extendedKalmanfilter,EKF),其系统状态方程与输出方程如式(4),(5)。

式中:xk+1为k+1时刻的系统状态变量,xk为k时刻的系统状态变量,ur为系统当前输入变量,yk为输出变量,f(xk,uk)为非线性状态函数,e(xk,uk)为非线性测量函数,WK,Vk为系统误差,他们是互不相关的高斯白噪声。
将非线性状态函数和测量函数通过一阶泰勒多项式展开进行线性化处理得到系统状态矩阵如式(6),(7)。

由式(6),(7)和式(4),(5)的一阶泰勒展开式可得非线性系统状态空间方程如式(8),(9)。

得到非线性系统状态空间方程后,在使用EKF算法,过程如下:
系统当前状态:

当前状态误差协方差:

更新卡尔曼增益:

更新系统当前状态:

更新当前状态误差协方差:

在式(11)、(12)中:的Q,R为Wk,vk的协方差矩阵。
基于二阶等效电路模型在联合扩展卡尔曼滤波算法对FUDS工况进行SOC估算,结果如图7所示。

其中SOC1为真实SOC值,SOC2为基于EKF的SOC估算值。
通过图中两条曲线对比可知,模型精度较高,能够较好的估算SOC值。

如图8是制作的一台多通道壁厚检测机器人样机,通过本文电池剩余电量研究,对机器人供电电池剩余电量进行估计,并开发了手机APP,如图9所示。

通过比较剩余电量估计值与实测值发现,两者较为接近,说明模型和算法的精度较高,能够满足使用要求。
«——【·结语·】——»
通过建立二阶RC等效电路模型,引入温度变量分析电池的开路电压,基于Simscape进行参数识别搭建电池模型,通过仿真实验验证该模型的有效性,最后基于扩展卡尔曼滤波算法完成SOC估算实验。
完成了壁厚检测机器人电池剩余电量估算研究和实际应用。

通过对壁厚检测机器人电池剩余电量估算研究,能够较好估算机器人剩余电量,防止机器人出现因电量不足还继续运行的情况,能有效提高机器人的安全性。
