
假设有一天,你下班回到家,发现无人机已经帮你把垃圾倒了,地板机器人已经把房间清扫得一尘不染,衣柜里的衣服也都整理得井然有序。
这听起来像是一幕科幻电影的场景,但如果李飞飞团队的最新研究成果得到广泛应用,这样的生活场景可能变得触手可及。
BRS:帮助机器人掌握多样化的家务任务
在李飞飞团队的研究中,BRS(BEHAVIOR Robot Suite)是一款最新研制的双臂移动机器人,正在尝试攻克通用家庭移动操作任务的难题。
这款机器人可以执行许多日常家务任务,例如倒垃圾、摆放衣物以及清洁马桶。
它能应对这些任务利用一个综合性框架来掌握机器人多样化的家庭任务中移动全身操作。

不论是在客厅捡垃圾、厨房摆放物品、还是浴室清洁马桶,这款机器人都能轻松应对。
实现家务机器人的关键技术:双臂协调与导航要想成为一个合格的家务机器人,这些机器人的关键在于它们的硬件设计和全身协调能力。

研究团队进行深入分析后,发现成功执行这些家庭任务的关键在于三项全身控制能力:双手协调操作、稳定精确的导航能力、以及广泛的末端执行器可达性。
简单来说,搬运大型重物,比如客厅的垃圾袋,需要机器人实现双手操作。
而在房屋中寻找并搬运物品,则依赖于其稳定的导航能力。

为了解决这些任务,机器人需要能够在不同的高度和位置进行有效动作,并且灵活调整自身。
这不仅仅是简单的机械运动,研究团队设计了配备双臂、移动底座和灵活躯干的机器人,使得这些复杂动作更加自然流畅。
虽然这么复杂的设计在数据采集和全身协调动作方面带来了重大挑战,但团队通过创新的方法,确保机器人能准确、有效地执行各种家务任务。

了解了BRS的核心任务能力后,我们再来看看团队推出的JoyLo系统。
这是一个构建经济实惠的全身远程操作界面的通用框架。

它能让机器人在高自由度移动机械臂的情况下流畅操作,并便于策略学习的后续数据收集。
研究团队在他们的R1机器人上实现了JoyLo,该系统的设计目标是实现高效的全身协调控制系统,确保复杂动作的流畅衔接。
此外,该系统提供丰富的用户反馈机制,使用户能够更直观地进行远程操作体验。

比如,你在办公室通过JoyLo远程操作家中机器人,让它在客厅捡垃圾、擦拭桌面、归置物品,仿佛你亲自动手一样。
最令人惊讶的是,JoyLo的成本不到500美元,这大幅提高了系统的可及性,使得不久的将来,可能每个家庭都能负担得起这样的智能设备。
WB-VIMA:模仿学习优化全身动作
除了硬件设计,对机器人的学习训练同样至关重要。
李飞飞团队开发的WB-VIMA是一种模仿学习算法,旨在通过利用机器人的运动学层次结构来建模全身动作。
这种算法的一个关键见解是机器人关节之间存在强烈的相互依赖关系。

上游链接的小幅移动可能会导致下游链接的大幅位移,确保所有关节之间的精确协调对于执行复杂任务至关重要。
例如,当机器人拿着杂货同时打开门,必须协调运用其全身动作。
WB-VIMA通过这种自注意力动态聚合多模态观察,使机器人能学习表现力强的策略,并减轻对本体感知输入的过拟合问题,提升了执行任务的效率和准确性。
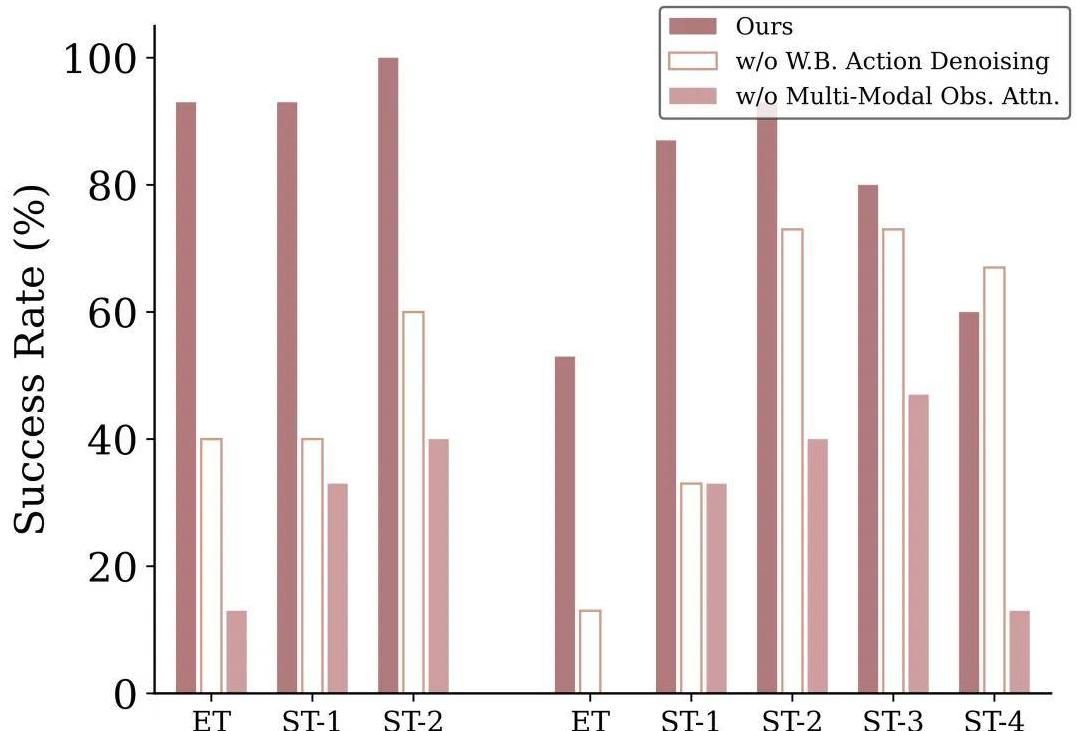
在团队的实验中,WB-VIMA在各种任务中全面超越了基线方法,使得端到端成功率显著提升。
看到这样的数据,普通家庭很可能不久就能迎来这些高效的家务机器人,带来全新的生活体验。
结尾:智能家务的未来
你可能会问:“那么,这些家务机器人真的靠谱吗?
”新技术总是带来许多困惑,但也正是这些困惑推动我们不断进步。
设想一下,有一天,你的家务不再是疲惫的一部分,而是科技带来的便捷。

当你下班回到家,迎接你的不再是一地的杂乱,而是机器人已经处理好的一切。
这不仅是效率的提升,更是让我们拥有更多时间去关心和照料家人,享受真正属于自己的时光。
李飞飞团队的研究不仅是技术上的突破,更是我们生活方式上的重大改变。

或许在不远的未来,家务机器人将成为我们家庭的标配,为我们带来更加智能、便捷的生活,让我们有更多时间去享受生活本身。
科技,正在让家庭生活变得更加美好。
