央视近日报道了一款由上海交通大学研制的“六足机器人”,并提及其“可能登月”,这条消息迅速在航空航天领域掀起讨论。
毕竟,在我国探月工程的发展历程中,六足机器人并非陌生概念,而其“可能登月”的暗示,更是让人不禁联想到即将执行嫦娥七号任务的“飞跃探测器”。
那么,这款六足机器人究竟是我国探月工程的新突破,还是一项独立的科研成果?它的技术优势又意味着什么?

回顾我国探月工程的发展,自嫦娥一号任务以来,我国的探月工程已经走过二十余年,并成功实施了四次登月任务,取得了四战四捷的优异成绩。
从嫦娥三号、嫦娥四号的“玉兔”系列月球车,到嫦娥五号、六号的采样返回,我国已经建立了一整套较为成熟的探月体系。
如果说此前的探月任务主要集中在技术验证和工程能力建设上,那么从嫦娥七号任务开始,我国探月工程将进入科学探测的深度探索阶段。
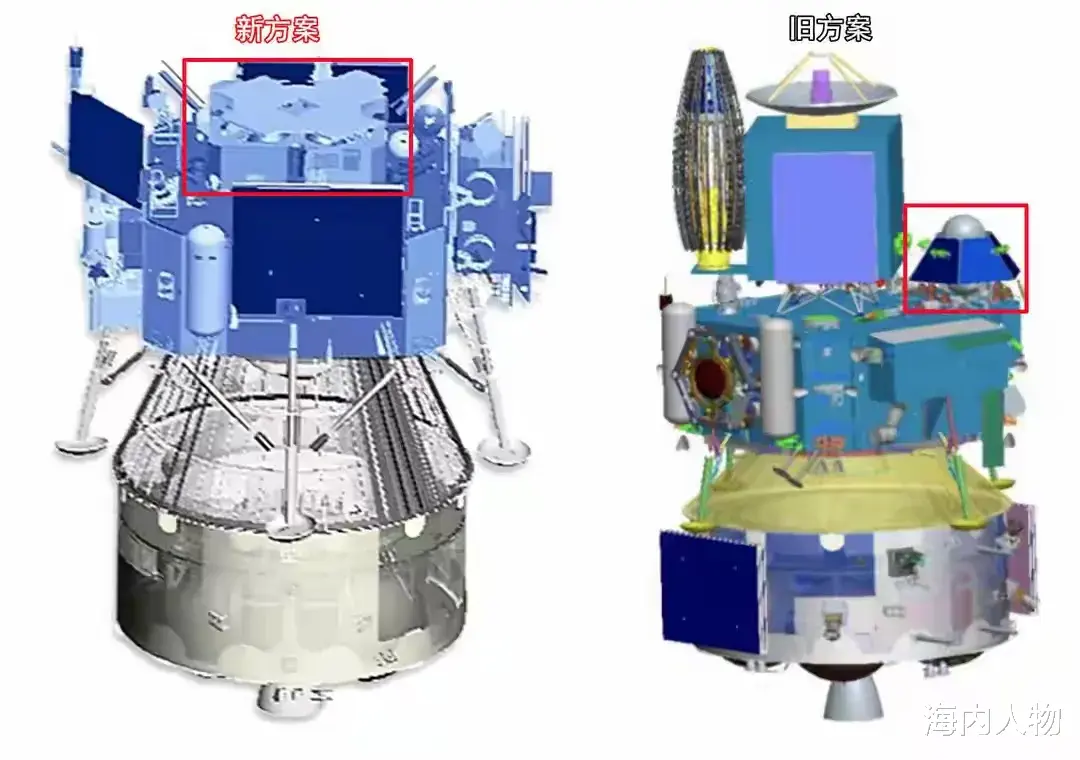
嫦娥七号计划于2026年发射,其探测任务更为庞大,携带轨道器、着陆器、月球车以及飞跃探测器四大核心单元,其中,飞跃探测器的作用尤为关键。
之前的人类登月历程中,美国曾在阿波罗15号、16号和17号任务搭载了类似的轮式月球车,宇航员首次使用了被称为“月球老爷车”的四轮月球车。
这辆月球车外形酷似吉普车,拥有双座自动行驶装置,其车身大部分采用铝结构,车轮由镀亚铅的钢丝编制而成。
宇航员驾驶这辆“轮车”极大地扩展了宇航员在月球上的活动范围,使他们能够在更广阔的区域进行科研实验和样本采集。
包括后来的美国月球车研发项目也均采用了类似轮式设计。

相比之下,六足机器人具备更加灵活的运动方式,六足机器人正是在这一任务背景下诞生的。
与传统月球车不同,嫦娥七号的“飞跃探测器”不仅采用六足结构,还具备短程飞跃能力,这使其能够克服月球南极崎岖的地形,进入永久阴影区进行科学探测。
传统轮式探测器在月球表面行进时,面对阴影区陡峭的坑洼地形往往难以深入,而“飞跃探测器”可以通过短程跳跃快速跨越障碍,深入目标区域。
其仿生学设计赋予它极强的稳定性和适应性,即便在崎岖地形或碎石密布的区域,也能稳定行走。
同时,六足机器人即使损坏一条腿,依然可以依靠剩余的腿完成任务,这种冗余设计大大提高了探测器的生存能力。
尤其是在月球南极复杂的地形环境下,六足机器人将展现出显著优势。

月球南极被认为是未来载人探月和科研站建设的关键区域,因为科学家推测,南极阴影区可能存在大量水冰资源,而水冰的存在对于未来的长期驻留至关重要。
嫦娥七号的主要任务就是探测月球南极地区的水冰资源,也就是人们通俗所说的“找水”!
那么,央视报道的六足机器人是否就是嫦娥七号的飞跃探测器?从研制时间和技术方案来看,这种可能性并不高。
从任务研制周期来看,嫦娥七号的方案早已确定,并至少进入初样研制阶段,因此,央视报道中的“六足机器人”显然不是嫦娥七号的飞跃探测器。既然如此,为何仍称其“可能登月”?答案在于,六足机器人并非嫦娥七号独有。随着我国探月任务的推进,未来将开展月球科研站建设,而六足机器人极有可能成为科研站的重要探测工具。
这次嫦娥七号的“飞跃探测器”代表了六足机器人的首次正式应用,在更长远的月球探测计划中,这类机器人就将成为科研站的标配设备。
我国正与俄罗斯合作推进国际月球科研站(ILRS)项目,目标是在2030年前后完成科研站的初步建设,并在未来实现长期驻留。
在这样的背景下,六足机器人势必将承担重要任务,在未来的月球探测任务中发挥更大的作用。
大胆设想一下,六足机器人作为月球科研站的先遣勘测设备,在不同区域进行地质分析,寻找合适的建设地点,进入崎岖区域采集数据,提高科研站选址的科学性。
等2030年中国人实现载人登月以后,六足机器人就可以替代人力承担物资运输和设备维护的任务。
在低重力环境下,承担小型货物搬运,并且自主完成设备检测、能量补给、部署实验设备、挖掘月壤样本,甚至构建临时避难所。
相比人类宇航员,机器人不受生理条件限制,可以长期在月球环境中工作,为宇航员提供必要的支持。
不仅仅是月球探测,在更遥远的深空探索领域,六足机器人同样将展现出了极大的潜力,比如:火星、木卫二、土卫六等星球探测任务。
火星探测方面,目前的探测器主要依靠轮式或履带式设计,但火星表面的崎岖地形同样对其行动造成了限制。
木卫二和土卫六这两个星球的表面环境也极端复杂,木卫二的冰层下可能存在地下海洋,而土卫六的大气层和甲烷湖泊提供了独特的研究价值。
传统探测器难以在这些星球表面顺利行进,而六足机器人则可以凭借其适应性,深入这些星球进行更高精度的探测。
可以预见,未来的深空探测将不仅仅依赖单一探测器,而是采用“机器人团队”协同作业的模式。
从央视报道的六足机器人,到嫦娥七号的飞跃探测器,再到未来的月球科研站和深空探索任务,六足仿生设计正在逐步改变我们对机器探测的认知。
随着技术的不断进步,我们或许将在不久的将来看到六足机器人成群结队地行走在月球表面,甚至深入火星、木卫二等更遥远的星球。

用户13xxx33
关节那么多,腿那么细,确认能可靠吗?
路遥
轮车才可以在月球飙车啊,美国登月技术领先中国五百年[呲牙笑][呲牙笑][呲牙笑]
苍云横渡客 回复 02-08 21:35
难道是为了不打美国脸,绕过能不能飙车这个选项?毕竟没轮子啊!