机器人核心零部件技术现状及趋势

工业机器人是我国制造业的“顶冠明珠”,在机器人核心零部件的研发制造上,我国在很多方面已经接近国际顶尖水平,但一些核心技术仍无法满足复杂高端领域应用需求,如精密减速器的传动精度与寿命间竞争机制不清、控制器的动力学辨识精度低、伺服系统多物理因素对极限转矩的影响机制不清、先进核心零部件测评技术体系缺失等,因此亟待开展机器人核心零部件性能提升研究与应用。
1 精密减速器欧美、日本等工业强国长期致力于高端机器人精密减速器研究。以日本哈默纳科公司、纳博特斯克株式会社为代表的减速器国际企业系统地开展了齿形优化设计、高精度加工工艺研究:纳博特斯克株式会社开发的RV-N、RV-C等多个系列RV减速器,额定寿命超过10000h,角传动精度不大于1';哈默纳科公司研制出CSF/CSG等20多个系列谐波减速器产品,额定寿命超过10000h,刚度下降率不大于50%,广泛应用于机器人、航空航天、医疗器械等领域,市场占比超70%。
国内涌现出一批以陕西秦川、深圳大族、重庆大学为代表的精密减速器企业与研究机构,在精密减速器领域取得了显著的成就。重庆大学突破减速器多齿啮合效应和载荷分配机制,成果支撑国内精密减速器的开发;陕西秦川研制BX系列RV精密减速器;深圳大族研制出双圆弧齿的LHS(G)、HMCS/HMHS系列谐波减速器,额定寿命达8000h,逐渐替代国外中高端产品。但在高端产品的精度保持性、可靠性、批量加工一致性方面仍有差距。
1.1 传动精度
由于RV减速器的曲轴存在制造和装配误差,此误差影响了减速器的传动精度和效率,减速器的承载能力也大大降低。为了提高曲轴的设计精度,奚鹰等人通过分析曲轴偏心距对减速器的影响,建立减速器曲轴的数学模型,经过MATLAB计算得出减速器的曲轴偏心距应为1.3mm,其误差对精度的提高和减小回差间隙有很大帮助。减速器主轴的承载能力对其精度也至关重要。
通过分析主轴的受力模型得知,当其接触角在30°~50°中,主轴具有更大的承载能力。同时在主轴的设计制造中,应重点控制其加工工艺,考虑加工经济性的同时,使其具有更好的使用性能。同时,WANG、MAO为了准确测出RV减速器的传动误差,搭建了各个模块的机器人减速器的实验平台来测量两种常见型号的减速器在不同条件下的传动误差值,如图1所示。
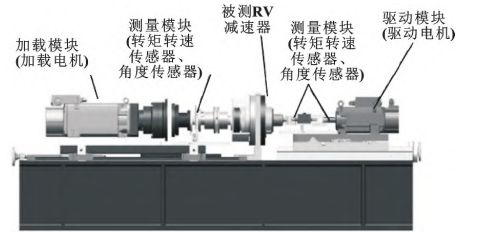
图 1 试验结构分析得到误差曲线,基于实验数据得到RV减速器的误差随着负载和输入转速的增大而增大,随刚度的增大而减小,其中负载对其传动精度影响最大。而YANG等结合减速器的一级渐开线齿轮减速和二级摆线针轮减速的啮合特性,建立了传动机构误差模型,通过数值分析和实验,更加详细地解释了原始传动误差与输出误差的关系,得出各种误差在减速器的传动误差中所占比例,对减速器的传动精度研究具有很重要的理论指导价值。
1.2 故障诊断
机器人用RV减速器的故障诊断准确率一直很低。针对这个问题,陈乐瑞等利用非线性输出频率响应核主元分析相结合的方法来诊断RV减速器的故障,其流程如图2所示,通过批量估计法得到每种状态的前4阶频谱值,然后利用这种新方法生成的数据传给支持向量机分类器进行测试,结果表明:这种方法较仅对振动信号的时域和频域进行测量的传统方法准确率有很大提升。

图 2 基于 NOFRF 频谱的故障诊断流程刘永明等在此基础上,利用旋转机械测试信号周期演变特征和集成经验模态分解(EEMD)可以有效反映数据周期性的特点,提出一种基于EEMD的粒子群算法(PSO)优化的极限学习机(ELM)故障诊断模型,实验结果证明:这种模型能够更有效地判断出RV减速器的工作状态。
而蔺梦雄等对比分析以往采用的往复摆动方式对精密减速器进行受损故障分析的方法,发现采集的信号定位减速器的故障源非常困难,因此提出一种阶次跟踪分析方法,通过对减速器的非平稳信号进行重新采样,得到的平稳角度域信号进行快速傅里叶变化,实现了变转速实验工况下行星摆线针轮减速器的故障诊断。结果表明:提出的阶次跟踪分析方法能够实现对行星摆线针轮减速器在时变工况下各重要零部件的故障定位,为摆动疲劳实验故障的快速定位提供了指导和帮助。
1.3 动力学仿真
为了进一步探究机器人用RV减速器的动力特性,奚鹰等人基于Adams强大的动力学仿真能力,在通过金相实验得到RV减速器的各项结构参数和材料属性后,结合MATLAB计算得到了动力参数,在对模型简化的基础上,得到了合理的减速器动力学模型,且行星架上输出值与理论值的误差在0.8'之内,最终得到具有较高精度的动力学模型,如图3所示。

图 3 RV 减速器 Adams 模型
基于多体动力学仿真技术,建立了轴承游隙、轮齿接触、针齿与针齿槽接触的动力学仿真模型,考虑影响RV减速器角传动误差的小周期因素,选取同一装配尺寸链中的针齿中心圆直径与针齿槽直径,进行误差组合,并在额定工况下进行动力学仿真,分析角传动误差的变化规律。YU等分析了RV减速器产生的附加转矩的特性和RV减速器的空载运行特性,提出了一种利用奇异值分解滤波测量空载运行时RV减速器转矩的新方法,以消除附加转矩的影响,并分析其动态。
为了更深入地研究减速器动力学特性,庞杰、韩振南采用集中参数法,通过改变啮合刚度分析了啮合力的变化,随着啮合刚度的增加,在一定范围内,传动过程中的啮合力更加稳定,为RV减速器的故障诊断和优化设计奠定了基础。
2 控制器
控制器是机器人的大脑,决定机器人功能和性能优劣。奥地利Keba、瑞士ABB等企业依托过去发展汽车产业优势,在机器人控制器领域形成了坚固的技术壁垒。Keba的KeMotion通过搭载Automation Runtime完成实时控制,支持EtherCAT、SercosIII等多种实时以太网总线;ABB将新一代力控方案融入到机器人控制器IRC5中,有效提升了机器人动态响应和运动精度。
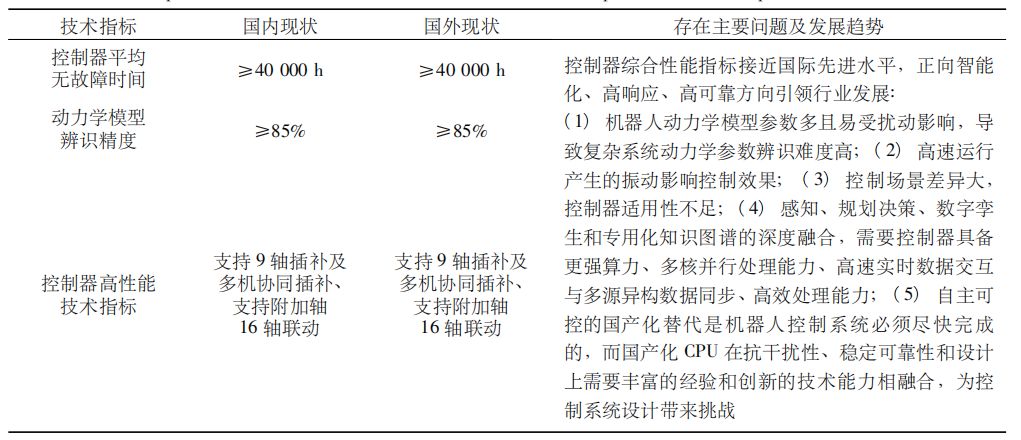
以北京航空航天大学、固高科技股份、广数、华数、重庆大学等为代表的科研机构助力国产机器人控制器取得重大突破,综合性能指标比肩国际先进水平。北航提出了6R型工业机器人负载识别方法,重庆大学突破了未知网络拉格朗日系统的分布式自适应跟踪控制策略,为研发高性能机器人控制器提供了支撑;固高研发的驱控一体机器人运动控制平台,在可靠性、柔性可扩展特性上已经比肩国外竞争对手。随着机器人向智能化、高响应、高可靠方向发展,给控制器提出了更高要求,亟需突破控制器柔性可扩展、高性能高可靠控制设计、动力学参数高精度自动辩识、高速稳定运行与振动抑制等关键技术,如表1所示。表 1 控制器国内外技术指标对比、存在问题与发展趋势
2.1 动力学参数
目前主流的控制方式为“运动控制”,这种利用机器人期望轨迹与实际轨迹的偏差进行负反馈的控制方式,对高精度的机器人来说可能存在运动抖动的问题。为了消除抖动,研究人员采用“动力学控制”的方法,利用B&R控制器良好的实时特性,获得机器人各项数据并完成机器人静态参数辩识,得到精确的机器人系统数学模型后就可以保证机器人有更好的动态性能,实现了前反馈控制。
2.2 控制方式设计
自主可控的国产化替代是机器人控制系统必须尽快完成的,而国产化CPU在抗干扰性、稳定可靠性和设计上需要丰富的经验和创新的技术能力相融合,为控制系统设计带来挑战。研究人员提出一种新的机器人控制器的硬件体系结构,以通用的IPC为硬件平台,操作系统Windows为软件平台,实现了PTP和CP两种控制方式,并给出了Windows环境下编写中断服务程序的方法,如图4所示。它相比于传统控制器的上下级控制方式有很大的提升。

图 4 Windows 环境下中断响应过程另外研究人员在机器人控制器抗干扰设计的动力学方程的基础上,根据云工业机器人的控制系统的特性,设计了基于DOB技术的工业机器人控制技术,大大提高了控制器的抗干扰能力。
3 伺服系统
伺服系统是机器人的动力核心。目前国内伺服驱动系统市场主要分为日系、欧美及国产三大类,主流产品有安川∑7系列、三菱J5系列以及科尔摩根AKD系列、汇川SV660系列、禾川X6系列。但在高端伺服领域,国外产品仍然占据主导地位,日系安川、三菱、松下和德系西门子等国际品牌市场占比超75%。以安川∑7为代表的伺服系统全系列最高转速达6000r/min,齿槽转矩波动小于1%,具备3倍以上过载能力,以及500Hz以上、几十赫兹以下高低频振动强化抑制能力,转速波动小于0.1%。“十三五”以来,以禾川股份、广数、华数为代表的科研机构推动国产伺服系统迅速发展。
禾川股份研制的X6伺服电机全系列在性能指标上接近国际先进水平,最高转速达6000r/min,具备3倍以上过载,齿槽转矩波动小于1%;广数伺服控制器通过自适应滤波器在线参数配置来抑制100Hz以上高频谐振,转速波动小于0.5%。但国产伺服系统在功率密度、转矩/转速平稳性、动态响应等方面难以满足市场高端需求,亟需突破以形成国际竞争制高点,如表2所示。表2 驱动器与伺服电机国内外技术指标对比与存在问题

4 测评方法
更加完整的测评体系已逐渐成为工业机器人竞争的风向标。日本纳博、安川、奥地利Keba等零部件企业采用企业标准开展可靠性和性能测评验证,测评条件和方法对外封锁,形成了较强的技术壁垒,能够确保产品的批量生产一致性和高可靠性。“十三五”以来,国评中心(重庆凯瑞机器人)建成了核心零部件性能测试平台,制修订标准规范50余项,占比超60%,实现机器核心零部件性能测试技术体系从“无”到“有”,积累了大量数据。
但现有体系主要引用国际通用性能、安全标准,存在测试验证时间长、关键技术参数测试精度不高、数据挖掘利用不充分、高水平一致性测评方法不足等问题,尚未形成保障先进水平核心零部件的测评技术与标准规范体系。基于这种状况,上海大学张曦等人发明一种机器人几何精度测评软件,其工作流程如图5所示,完善了机器人几何精度测评方法和标准。

图5 测评流程《中国制造2025》出台以后,虽然国内的测评体系在不断完善,但在研读大量文献后了解到国内测评体系标准化仍存在很多不足之处。目前国内标准如ISO9283、JB/T8896、JB/T10825和GB11291等通用标准存在测量工况少,无法准确给出优化建议以及工业机器人精度、经济环保方面的测评,而国外采用企业内部标准,对国内进行技术封锁,使产品保障高一致性和高可靠性。
目前机器人的检测标准得到了国家的足够重视,最具权威的就是国家组建的“四个中心+两个平台”,即国家机器人检测和评定中心以及公共服务平台,这些测评中心配置的设备如环境检测平台、振动台(见图6(a))、冲击台(见图6(b))以及电磁类检测设备,都进一步填补了我国测评系统的不足。

图 6 国家机器人测评中心设备2025年机器人行业营业收入预计突破5000亿元,是我国机器人产业自立自强、换代跨越的战略机遇期。研制具有国际同类产品先进水平的机器人核心零部件,构建基于数据驱动的零部件综合性能评估数字孪生平台,实现机器人本体集成及典型行业推广应用,形成高水平零部件技术与标准规范体系,对提升我国机器人核心零部件产品国际竞争力、推动工业制造业转型升级、建设智造强国具有重要意义。
5 结论
我国研制的机器人核心零部件与国际同类先进产品尚有差距,我国应快速实现推广应用高端机器人对核心零部件性能要求,突破制约我国核心零部件性能与一致性提升的技术瓶颈,建立与国外一流品牌综合指标对标体系,搭建基于数据驱动零部件评估孪生平台,研制机器人用精密减速器、控制器、驱动器、伺服系统,性能达到同类产品国际先进水平,实现本体集成配套及推广应用,提升我国机器人国际竞争力,抢占国际竞争制高点。
-对此,您有什么看法见解?-
-欢迎在评论区留言探讨和分享。-
