

鱼群、蜂群和椋鸟群在自然界中表现出蜂拥行为,它们像液体一样同步流动,协调变换形状。芝加哥大学物理学教授Heinrich Jaeger和James Franck Institute研究人员Baudouin Saintyves等物理学家,结合流体力学的角度,他们将这种物理学原理应用于模块化自适应机器人技术的开发,研究出具有液体和固体特性的模块化机器人。
该原型是与芝加哥伊利诺伊理工大学(Illinois Institute of Technology at Chicago)机械与航空航天工程系教授Matthew Spenko合作开发的,论文发表在《科学机器人学》(Science Robotics)上。

这种像液体一样流动,在群体中没有领导者的情况下协同行动,并对环境做出反应的情况,激发了Saintyves和Jaeger两位科学家的创造灵感,由此诞生的模块机器人被命名为“Granulobot”(粒状机器人),它可以分裂、重新组合和重组,以适应环境。根据其构造,“Granulobot”既可以像坚硬的固体,也可以像流动的液体。
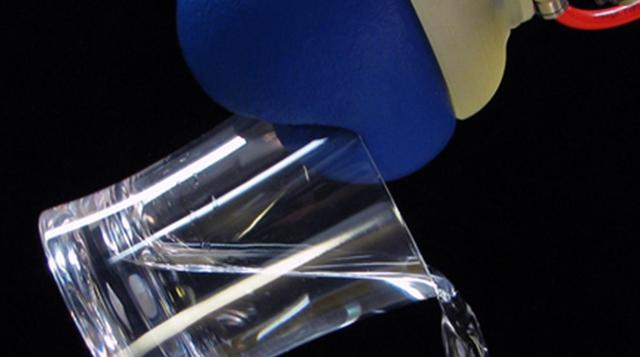
“Granulobot”(粒状机器人)是一组简单的圆柱形齿轮状装置,装有两块可绕圆柱轴旋转的磁铁。一块磁铁自由转动,另一块由电池供电的电机驱动。这种设计可以使各个单元通过磁力连接起来,一旦耦合,就会推动相邻的单元,使它们旋转。每个单元之间的接触会使聚合体整体移动,就像蜂群一样。
软体机器人技术领域对于机器人与人类接触的应用意义巨大。然而,软体机器人技术的必要性不仅限于安全性,还包括适用性。能够改变形状的机器人可以爬进 "犄角旮旯",或者管理不确定的地形,这对搜救等工作都很有用。

机器人要想改变形状并执行不同的功能,其在刚与柔之间可预测和可逆的波动能力是关键。粒状材料的固有特性使这种转变成为可能,这类材料可以根据接触而不是温度,在液态和固态之间转换。
物理学往往依赖于特定的条件,例如极小、极冷或极热。然而,“Granulobot”(粒状机器人)所依据的物理学原理与规模或温度无关,这也使得这个材料未来可以在水下工作,也可以在外太空工作。



