日本宇宙航空研究开发机构(JAXA)1月26日表示,两个微型机器人发回的第一批照片首次证实,用于调查月球的智能着陆器SLIM在目标区域着陆后,一头栽倒在月球表面。不过,JAXA认为精确着陆是成功的。

SLIM的预期正常着陆状态。
据报道,JAXA表示,SLIM的一台主发动机在距月球表面约50m处失去了推力,这导致SLIM的着陆速度比预期的要快得多,并栽倒在机头上。
在着陆之前,SLIM成功地将两个微型机器人探测器发射到月球上。
它们是玩具制造商Tommy设计的棒球大小的机器人LEV-2,以及配备无线电通信设备的跳跃机器人Lev-1。
LEV-2拍摄了275张周围环境的照片,LEV-1能够将这些照片传回地球。

两个微型机器人传回的第一批照片首次证实SLIM“被卡在了鼻子上”。
这些第一批照片首次证实SLIM“被卡在了鼻子上”。
尽管如此,JAXA项目经理酒井信一郎表示,他会给精确着陆打“满分”。
据悉,此前的探测器以直径为10公里的着陆区为目标,而JAXA的目标是击中直径不超过100m的区域。
日本在精确着陆技术上投入巨资,为该项目赢得了“月球狙击手”的绰号。
着陆器的电源问题使得确定确切的着陆位置变得困难,但经过几天的分析,JAXA确认精确着陆是成功的。
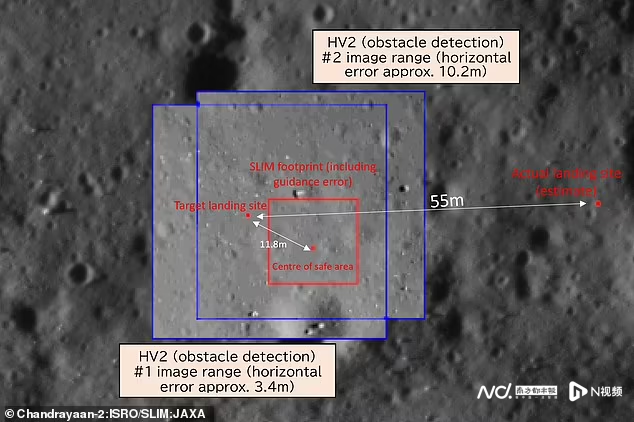
JAXA确认精确着陆是成功的,着陆点距目标位置仅55m。。
该机构表示,SLIM着陆点距目标位置仅55m。
SLIM之所以需要如此精确,是因为它试图降落在月球赤道Shioli陨石坑上一个布满碎石的15度斜坡上。
JAXA意识到这会造成着陆器倾覆的很高风险,但希望研究陨石坑周围的岩石,以更多地了解月球的形成。
当发现SLIM无法充电时,JAXA决定在电量只剩12%时停用着陆器。
JAXA项目经理酒井信一郎。
JAXA表示,当着陆点在未来几天内进入月球白天时,SLIM可能能够开始充电,并希望保持一些电量将有助于其重新启动。
在被关闭之前,SLIM能够使用其多波段光谱相机拍摄大量照片。
通过将月球表面的小岩石与印度“月船二号”着陆器记录的数据进行比较,JAXA能够计算出SLIM的位置。
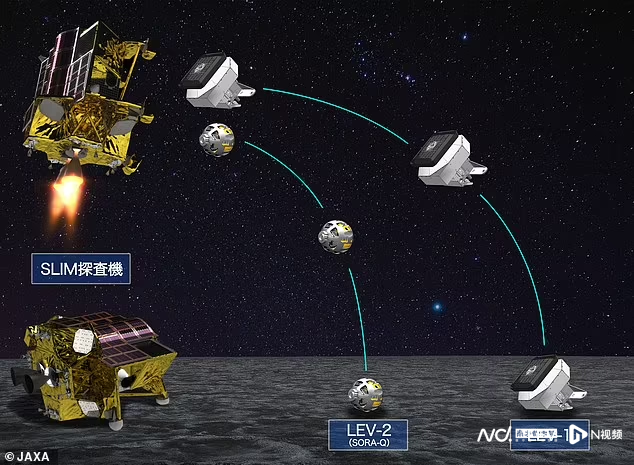
在着陆之前,SLIM成功地将两个微型机器人探测器发射到月球上。
设计LEV-2(也称为Sora-Q)的JAXA科学家平野大一表示,它选择了包含SLIM和附近月球表面的图像,并通过LEV-1传输图像,使这对微型机器人成为世界上第一个完成该任务的卫星。

玩具制造商Tommy设计的棒球大小的机器人LEV-2。
JAXA还表示,它的重量仅为4.6磅(2.1千克),是有史以来从月球直接向地球传输数据的最小、最轻的物体。
文/南都记者陈林
