报告出品方:东吴证券
以下为报告原文节选
------
人形机器人感知模块是运控与交互基础,遍布全身
感知模块是人形机器人具身智能的基础
◆ 感知是交互的基础:人形机器人包括感知模块、交互模块、运控模块,感知模块是基础,为交互与运控模块提供信息,并实时反馈,以便机器人感知外部环境和物体、调整运控规划。
◆ 感知是软硬件结合,遍布全身,不同传感器进行数据融合:类似于人类的各类感官神经,提供视觉、位觉、触觉、力觉等信息,分布于人形机器人的各类关节中,包含软硬件算法,各数据可进行融合,提供运控规划准确性。

人形机器人传感器至关重要,遍布全身
◆ 位觉传感器:使用量1颗IMU,用来测量机器人的运动及姿态信息,一个价格400-2000元,未来或取消。
◆ 视觉传感器:国内深度相机+激光雷达,特斯拉为纯视觉方案,1个鱼目摄像头+2个普通摄像头。
◆ 关节力控传感器:特斯拉每个线性关节在电机外分别放置1个一维压力传感器;每个旋转关节在减速器外分别放置1个一维力矩传感器,普通价格400元/个,高端价格4000元/个。国内方案不一。
◆ 手腕和脚踝传感器:每个手腕脚踝分别放1个六维力矩传感器(可选装),价格2-4万/个,但降价空间大。
◆ 触觉传感器:手部增加触觉传感器可提高灵巧手性能,多种技术路线布局;特斯拉直接使用10个触觉传感器。

六维力矩>触觉传感>关节传感>双目摄像头>IMU
◆ 综合考虑价值量、未来产业趋势,我们认为传感器排序六维力矩>触觉传感>关节传感>双目摄像头>IMU

不同厂商传感器设计各异,特斯拉轻视觉重运控
◆ 从视觉感知看,特斯拉纯视觉成本低:特斯拉基于自动驾驶积累的强大纯视觉算法,在人形机器人上简化使用三颗摄像头,成本极低,而国内厂商如智元、宇树,一般采用激光雷达+深度相机。
◆ 运控系统看,特斯拉追求精度,国内方案不一:特斯拉为追求精度,旋转/线性采用一维力/力矩传感器,而国内部分厂商采用电流环方式,无需使用力传感器。
◆ 触觉方案看,各家未定型:特斯拉gen-2仅发布手指新增使用10个触觉传感器,未透露更多细节;宇树明确表示,手指将自研并使用基于视觉方案的触觉传感器。

力矩传感器及触觉传感器未来市场空间潜力大
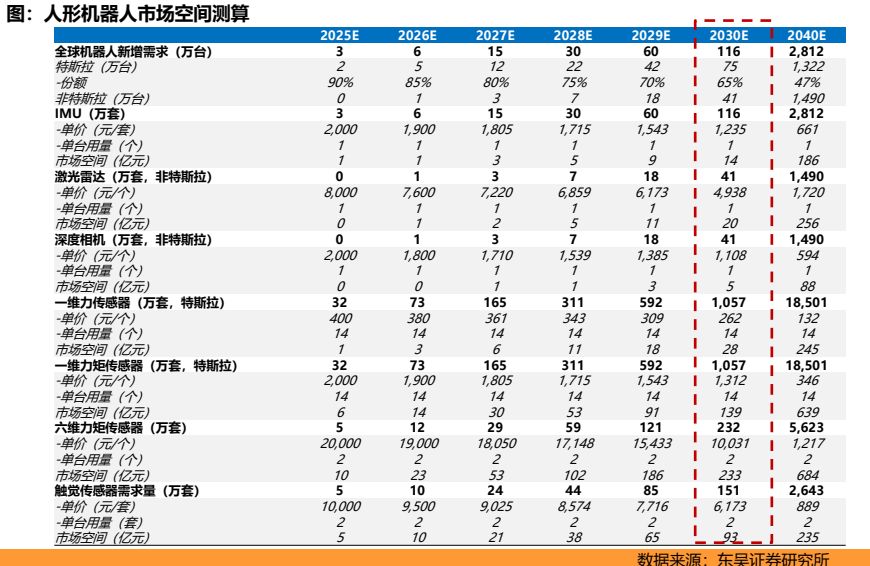
◆ 市场空间看,若2030年人形机器人全球量产116万台,考虑特斯拉市占率65%,并考虑降价,则预期六维力矩传感器市场空间230亿>一维力矩市场空间140亿>触觉传感器100亿。
六维力矩传感器壁垒高空间广,国产替代加速
六维力矩传感器提供最全面的力信息及受力姿态
◆ 信息最全面的力控传感器:六维力矩利用传感器中不同的感力元件,将力信号转换成电信号,能够同时测量三个轴向力Fx、Fy、Fz和三个轴向力矩Mx、My、Mz,能够满足任何方向上力的检测。六维力矩传感器不仅将力矩转为电信号,提供力信息,还可以获得内部受力的姿态,与三维力矩传感器相比,其能够消除弯矩对力测量的干扰,确保测量结果更加精确可靠。

应变片式为六维力矩主流技术方案
◆ 应变片式技术成熟为主流方案:根据敏感元件的种类,六维力和力矩传感器可分为电阻应变式、压电式、电容式、光学式等几类,其中电阻应变式为主流,其综合性能最优,精度高、技术成熟、测量范围广。
◆ 按输出结构看,直接输出型(无耦合型)为主流:直接输出型为六维空间力由测量元件直接检测或简单计算,无需各分力耦合,而间接型反之,需要各分力耦合才能得到六维输出。

应变片式原理为利用应变片受力产生电阻变化
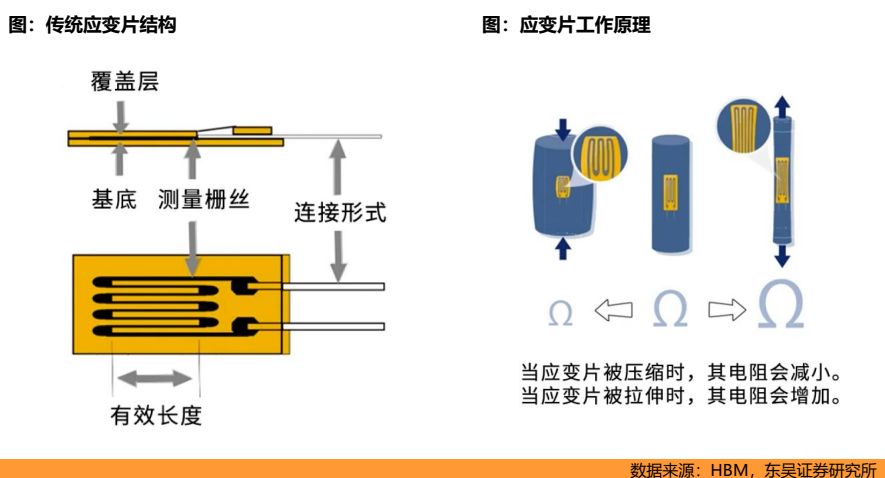
◆ 应变片可以捕获物体由于应力而引起的微小变化“应变”,并将这种变化转变为电信号输出。如果应变片被压缩,其电阻会减小。如果应变片被拉伸时,其电阻会增加。原因是当测量栅丝被拉伸时,电流通过的导体变细,导致电阻增加。
◆ 一个六维力矩传感器需要30-50个应变片。由4片左右应变片组成一个电桥,用于测量一维力,为降低耦合干扰,需增加电桥,一般一个六维力矩需要30-50片应变片,取决于电桥设计与应变片灵敏度。
金属和半导体两种应变片式共存,各有优劣势
◆ 金属应变片温度稳定性好、应变范围大,更适用于机械工程领域。应变片按照材质可以分为金属应变片和硅基应变片,均有基底、敏感栅和引线三大部分构成。金属应变片主流为箔式,采用聚酰亚胺作为基底,康铜丝粘附在上面,其温度稳定性较好,线性度高,应变范围大(可达到4%,而半导体应变片只能达到0.3%),使用方便,刚度与半导体应变片相当。
◆ 半导体应变片灵敏度高、响应快、体积小,更适合电力电子领域。半导体应变片是将单晶硅锭切片、研磨、腐蚀压焊引线,最后粘贴在锌酚醛树脂或聚酰亚胺的衬底上,其优势在于灵敏度高(高50-100倍),机械滞后小、体积小、耗电少,但稳定差,受温度影响大。

六维力矩传感器的工艺流程:设计与标定检测为核心
◆ 结构解耦设计是核心:可决定六维力矩传感器的实际性能,包括弹性体结构设计、贴片位置设计、电桥结构设计,理论上合理的设计可消除各个方向之间的耦合,但实际需依靠解耦算法进一步减小/消除耦合干扰。
◆ 贴片靠熟练技术工:由于传感器内部空间狭小,贴片组桥的技术壁垒非常高,目前国内外企业在贴片环节均需要人工进行。
◆ 六维联合加载设备是标定与检测核心:必须通过六维加载设备,标定样本点(53万个)获得传感器数学解耦模型与参数;检测则是评价标定的准确度如何。而六维加载设备为非标设备,需传感器厂商自研。

六维力矩传感器供应链及成本拆分:降本空间巨大
◆ 目前良率低、人工贴片效率低,造成成本高,但未来半自动产线推广,降本空间大:一般采用国内应变片单个传感器需要40-50片,海外则可降至30片,单片价格分化较大,国产金属箔式10-20元,海外硅应变片价格则贵30倍以上,其余原材料成本较低。人工方面,目前应变片需手工贴,人工成本较高,单个预计人工成本800元,同时良率低于70%,因此我们测算低端六维力矩成本4k元左右,高端成本2-3万。
◆ 未来低端成本有望降至1000元以内,高端降至5000元,降本空间大,降本一方面依靠半自动产线推广,人工成本下降,良率提升,另一方面硅应变片价格下降空间大。

国内六维力矩厂商规模尚小,但未来可期
◆ 国内规模尚小,且产品性能与海外厂商有差异。高工统计,22年中国市场六维力/力矩传感器机器人行业销量4840套,同比增长62.58%,其中宇立仪器份额预计50%,其余厂商坤维科技、鑫精诚、海伯森、蓝点触控、神源生智能、瑞尔特测控等,均已有相关的产品落地并进入产业化应用。其中宇力规模大、坤维转攻六维。
◆ 新进入者增加,后续井喷可期:东华测试、重庆鲁班机器人技术研究院、昊志机电、埃力智能等,已初步具备六维力/力矩传感器的生产能力,部分产品已开始送样测试。

海外六维力矩老牌厂商多,产品精度高,降本空间大
◆ 海外老牌厂商多,多有较长历史,业务结构复杂。日韩厂商包括韩国Robotous,采用电容式方案,规模较大;美国ATI、AMTI采用应变片式,其中ATI产品类型多,性能领先,价格高昂;欧洲厂商中,德国的HBM、ME,均可自产应变片;瑞士Kistler是电压式的领导者;丹麦的onrobot通过收购匈牙利OptoForce提升六维力传感器竞争力。
◆ 海外产品短期性能更优。量程范围广,能承受额定测量范围5到20倍的负载,耦合误差<1%,灵敏度高。

六维力矩传感器空间广,国产替代正当时
◆ 短期需求未爆发,规模尚小:目前六维力矩传感器主要应用于协作机器人、汽车测试、航天、医疗等领域,规模较小,高工统计22年中国市场六维力矩传感器销量4840台,我们预计全球2万台以内。
◆ 随人形机器人爆发,需求2030年有望井喷:为提高双手灵巧度、行走的平衡性能,人形机器人倾向于在手腕、脚踝分别安装六维力矩。目前出于成本考虑,假设一个机器人采用2个;远期考虑到手部使用六维触觉传感器,手腕或可不用六维,单个机器人用量依然预期为2个。因此我们测算2030年全球116万台人形机器人,对应232万套六维力矩需求,按照单价1万,对应233亿市场空间。
◆ 国产替代加速:六维传感器的壁垒更多在于工艺,无明显卡脖子环节,中国产生在中低端产品上已突破,且产品性价比高,且更多资本进入该领域,加速技术迭代,中国厂商优势明显。

触觉传感器多技术路线并行,美企领先,中国企业可期
人类手部触觉:多维度感知,高灵敏度,高拉伸率
◆ 人类实际的触觉感知,来自四种机械感受器的皮肤输入,包括迈斯纳小体、帕西尼亚小体、默克尔椎间盘、鲁菲尼的小体,其将机械能转为电脉冲,统称为低阙值(高灵敏度)。四肿感受器分布于皮肤的浅深层,测量频率低高不同,其中鲁菲尼小体负责动觉/本体感觉,对切向力感知明显。
◆ 人类手部触觉可感知力觉、温觉、痛觉等多维度感知,且手部灵敏度极高,女性指尖法向压力阙值为0.019g,同时拉伸率高,手腕处皮肤拉伸率超20%,且是三维全向柔性。

机器人触觉方案:多路线布局,寻找性能最优
◆ 触觉是电子皮肤的功能之一:电子皮肤是集合“触觉+仿生性+延展性” 的类人类皮肤,仍需长期技术进步。
而人形机器人触觉触感器,是电子皮肤性能之一,更倾向于感知物理变化(力、温度等),主要应用于手部或手指(触觉列阵传感器)和大腿、手臂等(大面积传感器)。
◆ 触觉传感器多技术路线布局,追求极致性能,实现真正灵巧手:两类型,一是基于Mems技术集成的触觉传感器,包括压阻式、电容式、光电式、电磁式,其中压阻式技术成熟,目前应用最广;二是视触觉传感器,随着算法及数据模拟,未来潜力巨大。触觉传感器追求,高灵敏度(多维力感知)、高集成度(单位面积列阵单元多)、高延展性、成本低,以便获取物体信息,提升灵巧手抓取的力和力矩的控制效果。

MEMS压阻式触觉传感器:技术成熟,低端最先放量
◆ MEMS压阻式触觉传感器技术最成熟,目前应用最广,预计短期是机器人触觉传感器最先放量技术。其原理和应变片类似,但不同的是其敏感元件为半导体(单晶硅),当受到外力挤压时,相应电阻率产生变化,从而测量压力值。其采用MEMS技术排列密集,集成度高,体积小,技术成熟,成本低。制造精度不同,价格从几十至上千不等,进口产品单点售价近千元。
◆ MEMS压阻式触觉传感器仍需提升灵敏度、增加软性。目前压阻式的触觉传感器主流是一维传感器,只能测试法向力,测试灵敏度不足(有效阙值0.1N左右),而三维传感器存在力解耦精度不足;同时,单晶硅和pcb板缺乏柔性,适合列阵式布局,不适合应用于大面积柔性应用,适合在指尖应用。

--- 报告摘录结束 更多内容请阅读报告原文 ---
报告合集专题一览 X 由【报告派】定期整理更新
(特别说明:本文来源于公开资料,摘录内容仅供参考,不构成任何投资建议,如需使用请参阅报告原文。)
精选报告来源:报告派科技 / 电子 / 半导体 /
人工智能 | Ai产业 | Ai芯片 | 智能家居 | 智能音箱 | 智能语音 | 智能家电 | 智能照明 | 智能马桶 | 智能终端 | 智能门锁 | 智能手机 | 可穿戴设备 |半导体 | 芯片产业 | 第三代半导体 | 蓝牙 | 晶圆 | 功率半导体 | 5G | GA射频 | IGBT | SIC GA | SIC GAN | 分立器件 | 化合物 | 晶圆 | 封装封测 | 显示器 | LED | OLED | LED封装 | LED芯片 | LED照明 | 柔性折叠屏 | 电子元器件 | 光电子 | 消费电子 | 电子FPC | 电路板 | 集成电路 | 元宇宙 | 区块链 | NFT数字藏品 | 虚拟货币 | 比特币 | 数字货币 | 资产管理 | 保险行业 | 保险科技 | 财产保险 |


现在工厂都是自动化设备,制造业根本就不需要人。这么多人只能去干服务行业,只有服务行业才能提供巨大的岗位。