文 | 煜捷史馆
编辑 | 煜捷史馆
-<碳纤维复合材料与传感器>-
复合材料因其更高的比刚度和强度,正越来越多地取代传统的各向同性材料用于航空航天领域。
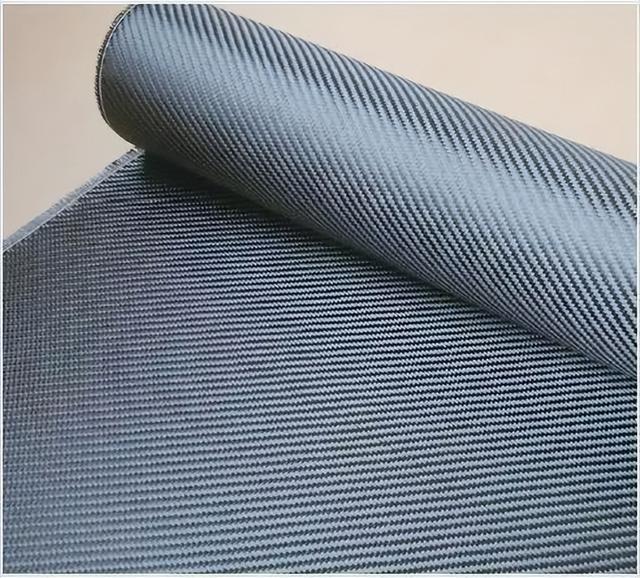
具体来说,碳纤维增强聚合物(CFRP)板已被广泛用于飞机的制造中,CFRP板就是由一些浸渍了聚合物的碳纤维织物制成。
这些织物按照指定的方向堆叠在一起,在高温和高压下形成。同时,复合材料的广泛应用也引起了人们的关注。
由于缺乏穿透性加固,复合材料的横向抗破坏能力很弱,复合材料的破坏机制比传统的各向同性材料要复杂得多。
跑道碎片、鸟击、工具掉落、地面车辆撞击飞机等造成的低速撞击,会导致复合材料出现几乎不可见的撞击损伤(BVID)。
BVID很难通过目视检查发现,它可能会随着时间的推移而增长,而不被及时发现,最终导致结构失效。
在自动预警系统的帮助下,定位算法可以提醒飞行员和工程师检查和保持特定的撞击位置,这对于减少结构性故障的风险具有重要意义。
常用的定位算法有神经网络算法、波传播算法和参考数据库算法。
接下来,煜捷将为你讲述碳纤维复合材料的灵活应用,对FBG传感器的定位性能有何影响。
参考数据库算法激发了许多学者的兴趣,因为该算法可以用相对较少的传感器提供可接受的定位精度。传统的参考数据库算法包含三个基本步骤。
首先,从监测区域中挑选一定数量的训练点。通过记录所有被选中的训练点的参考信号来建立参考数据库。
然后,发生一个需要定位的随机冲击。该算法计算其中一个传感器记录的随机撞击信号与数据库中所有参考信号之间的相关性,以评估其相似性。根据传感器,可以找到具有最大相关系数的训练点。
最后,所有传感器获得的位置的平均值被确定为该算法的撞击定位结果。

目前算法的定位精度主要依赖于随机冲击信号和数据库中参考信号的可重复性。通常假设FBG传感器的传感特性不会随时间变化。
事实上,FBG传感器或其安装结构在监测过程中遭受反复冲击时可能会被损坏。光纤包层会因撞击而断裂,因此一些光会从光纤中漏出,这导致了FBG传感器反射光谱的变化。
此外,安装结构可能会开裂,这就改变了振动波在结构中的传播特性。损坏的程度会随着时间的推移而增加,这将改变FBG传感器的感应特性。
因此,随机冲击信号将与相同位置的参考信号不同,定位精度将下降。
此外,参考数据库算法根据具有最大相关系数的训练点来确定随机冲击位置。由于这些点是孤立的,算法的定位精度受限于训练点的间隔。
因此,需要一种通用的策略来实现传感器损坏下的准确定位,以提高这种撞击定位系统的准确性和稳健性。
模糊证据理论是一种结合了模糊集和证据理论的混合理论。
模糊集善于描述由不完整或不精确的测量引起的不确定性信息,而证据理论能够处理证据推理过程中的冲突数据。
混合理论为处理工程实践中的仪器故障提供了一个机会。

-<冲击定位算法>-
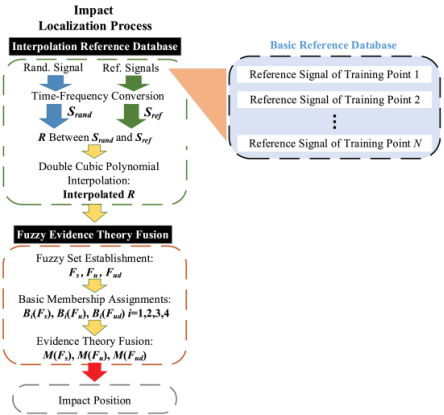
如下图所示,拟议的冲击定位算法由两个主要过程组成。
首先,通过存储参考向量Sref建立基本参考数据库。
一旦发生随机撞击,其向量Srand与参考向量Sref进行比较,计算出相关系数R。离散的R点通过双三次方多项式进行插值。
然后,建立三个模糊集Fs、Fu和Fud,并根据它们的模糊集成员分配Bi(Fs)、Bi(Fu)和Bi(Fud)来评估所有的位置。
评估FBG传感器的可靠性,融合来自不同FBG传感器的数据,生成综合成员分配M(Fs)、M(Fu)和M(Fud)。
根据证据理论,对影响进行定位。
A. 内插参考数据库
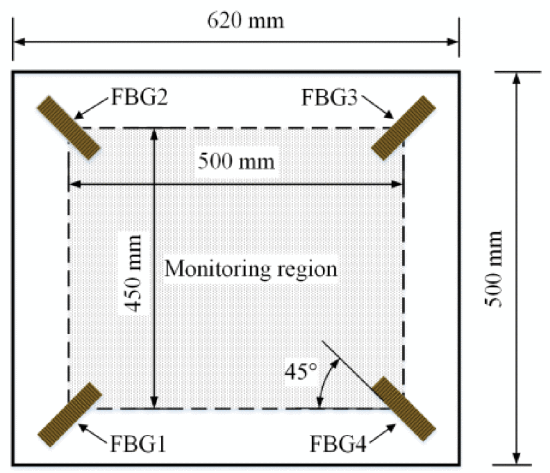
参考数据库是根据FBG传感器的阵列配置建立的。最常用的配置是一个矩形的监测区域,在矩形的四角有四个FBG传感器。
传感器以45°的方向连接,以提供足够的灵敏度。训练点均匀地分布在监测区域内。参考信号是通过冲击训练点产生的。
FBG传感器记录参考信号。从参考信号中减去初始波长以消除常数成分,然后通过傅里叶变换将信号从时域转换到频域。
参考信号的频谱向量作为Sref存储在参考数据库中。
与参考信号不同,要定位的随机撞击引起的信号是随机撞击信号。
一旦发生随机撞击,信号就会被转换为频谱向量,定义为Srand。为了比较Srand和Sref之间的相似性,相关系数R的计算方法是:
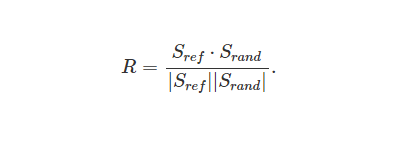
|Sref|和Srand|是Sref和Srand的2次方。如果随机冲击信号与参考信号相似,则R趋向于1。
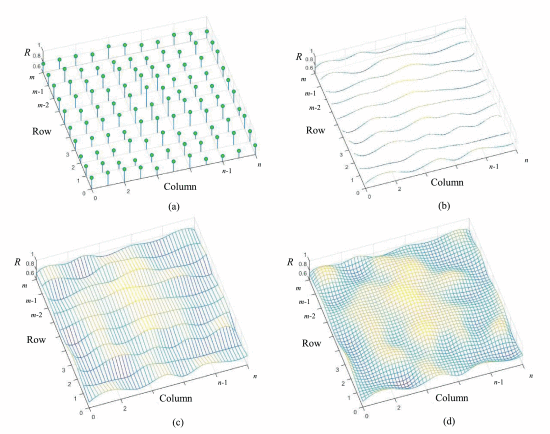
如图所示,通过重复所有参考信号的计算过程,在一个二维平面上产生一组R值。
值可以在训练点的相关系数之间进行内插。
因此,通过训练点之间的内插,可以得到更多的参考点。
由于较短的运行时间对定位算法很重要,所以采用双三次方多项式插值来平衡精度和运行时间。
B. 模糊证据理论融合
每个FBG传感器根据插值参考数据库获得一个具有最大R的位置。
目前的算法将用四个传感器获得的位置坐标的平均值作为最终的定位结果。
然而,在监测过程中,传感器或其安装结构会因反复撞击而损坏,这导致了定位误差。
由于传统的冲击定位算法无法评估传感器的测量可靠性,定位误差被带到了最终结果中,大大降低了定位精度。

模糊证据理论被引入,以融合来自四个传感器的数据。结合模糊集和证据理论,混合理论可以根据干扰信息做出正确的判断。
首先,模糊集被用来评估FBG传感器的冲击信号的可靠性。建立了三个模糊集。冲击集Fs和非冲击集Fu用来表示冲击是否属于这个点。
未确定集Fud用于描述不确定的冲击信号。由传感器损坏引起的测量不确定性通过引入未定集被考虑在内。
三个模糊集的信念度由基本成员分配B(Fs)、B(Fu)和B(Fud)描述,它们根据R的值计算如下:

-<实验设置和程序>-
A. 材料和方法
实验在一块620毫米×500毫米的CFRP板上进行。该板是由预浸渍的单向层压板制成。板材采用的堆积工艺是[45/0/45/90]4S。
方括号内的数字表示CFRP板中碳纤维织物的堆积顺序和方向(角度为度),下标4表示括号内定义的堆积过程应重复四次,s表示对称排列。该板的总厚度为4.6毫米。
一个铝框完全固定了板的边缘。四个光栅长度为10毫米的FBG传感器被用来检测冲击信号。
这些传感器的中心波长分别为1540、1544、1549和1554纳米。这些传感器被固定在复合板的下表面。
一个商用高速FBG解调器Smart-Scan(Smart Fibres Ltd,英国)被用来解调FBG传感器信号,采样频率为25 kHz。
低速冲击是由一个冲击锤刺激的,它是一个弹簧加载机构。锤头半径为22毫米。
冲击能量可以调节,精度为0.1焦耳,最大冲击能量为2焦耳。
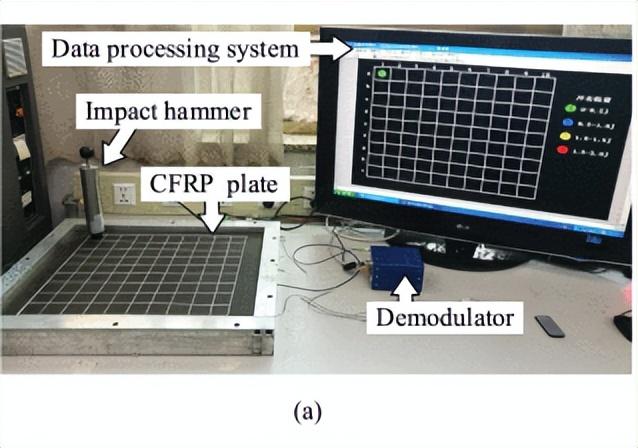
数据处理在Intel(R) core(TM) i7-4510U CPU上运行,频率为2.6GHz,内存为16GB。实验装置如图所示。
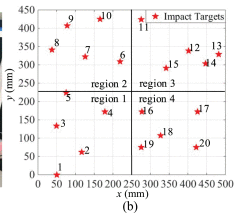
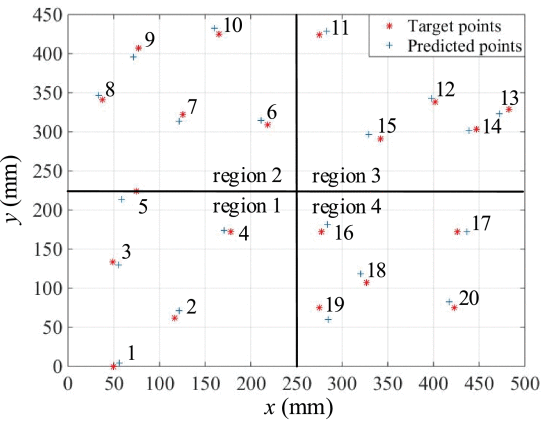
首先,训练过程是在传感器正常工作的情况下进行的。训练点在500毫米×450毫米的监测区域内,两个相邻的训练点之间有50毫米的空间。
因此,有110个训练点,编号从1到110。参考数据库是根据第二节建立的。
然后,将监测区域平均分成四个象限,命名为局部区域1至4。在每个区域随机选择五个由目标坐标代表的随机影响点。
表2显示了这20个随机撞击点的坐标。锤子的中心轴垂直地对准这些点。四个FBG传感器记录冲击信号。所提出的算法如上所述被运行。

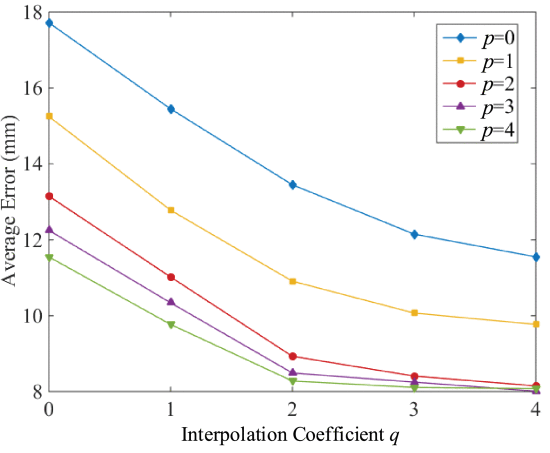
B. 内插系数的设置
为了确定插值系数p和q,进行了参数化研究。研究中使用了从1到20的随机撞击点。
如下图所示,在p和q从0到4的变化中,计算了平均定位误差。
C. 数据融合参数设置
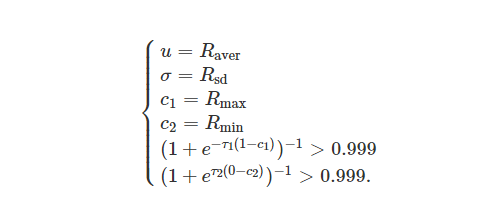
对训练点进行了统计分析,以确定数据融合的参数。根据110个训练点,共获得5995个R值。
Rmax , Rmin , Raver和Rsd分别为0.91, 0.63, 0.75和0.082。
u和σ分别为0.75和0.082;c1和c2分别为0.91和0.63;τ1和τ2应满足τ1>75和τ2>11。
为了分析τ1和τ2对Fs和Fud不确定性的影响,τ1和τ2都被设定为20、40、80、160、320和640。
三个模糊集的基本成员函数画在下图中。
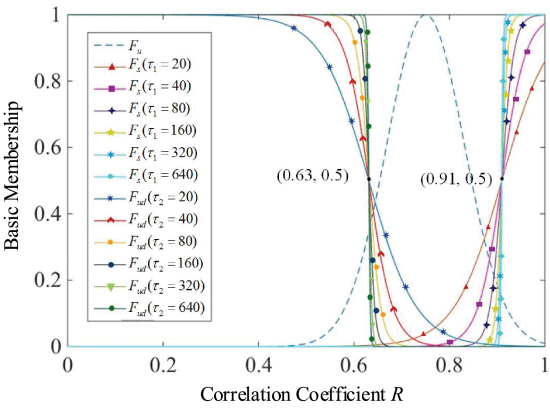
如图所示,三个模糊集的基本成员函数相互重叠。
当R相对较低时,Fud比Fu和Fs高。Fu首先上升到1,然后随着R的增加下降到0。
当R接近1时,Fud下降到0,而Fs上升到1。Fs和Fud的梯度随着τ1和τ2的增强而变大。
因此,Fs和Fud的不确定性降低了。当τ1和τ2超过160时,Fs和Fud逐渐接近于阈值为0.91和0.63的非模糊集。
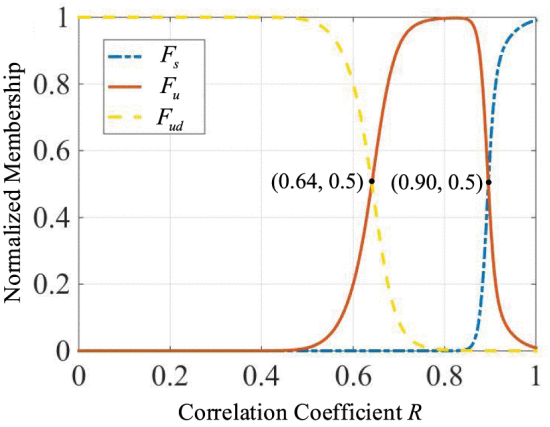
下图展示了确定参数后的归一化成员资格。
当R在0到0.64之间时,Fud是主导的。
当R在0.64和0.90之间时,Fu占主导地位,而Fs在R从0.90到1之间时占主导地位。
-<结果讨论>-
A. 完整的传感器和损坏的传感器之间的比较
为了分析传感器损坏对所提算法的影响,FBG传感器1被故意损坏,并选择随机撞击点1作为目标点。
将传感器损坏前记录的信号与损坏后记录的信号进行比较。两个信号的频谱如下图所示,插图是完整的和损坏的传感器。
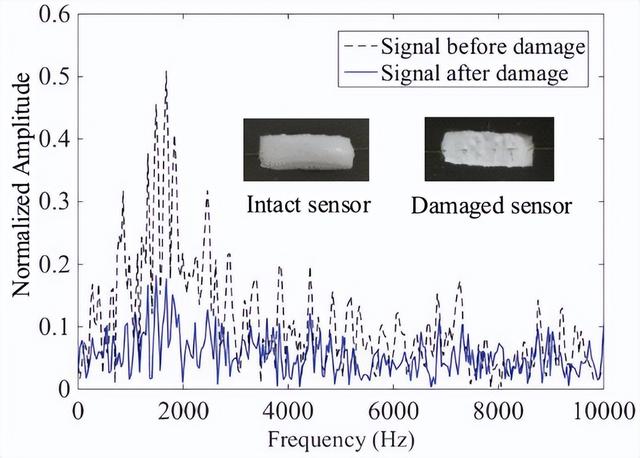
从图中可以看出,两个信号的频率主要集中在1000到3000赫兹之间。
然而,对于传感器损坏后的信号,其振幅变化不太明显,强度明显减弱。
此外,如下图所示,损坏前的R值与损坏后的R值在110个训练点上进行了比较。
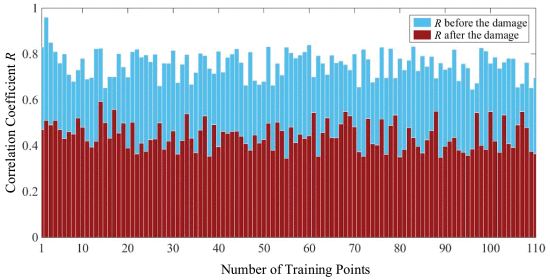
R的值范围被Fs、Fu和Fud划分为3个区间。
在损坏之前,最大的R值在训练点2(50,0),这里正好与随机撞击点1的位置重合,并且该值高于0.9,其中Fs占优势。
其他训练点的R值刚好在0.64和0.9之间,其中Fu占主导地位。拟议的算法对训练点进行了正确的分类。
损坏后,所有训练点的R值都下降。最大R值的位置变为训练点14(100,50),它明显远离随机撞击点1,定位误差为70.7毫米。
然而,所有的R值都低于Fud占主导地位的0.64。因此,通过所提出的算法,传感器损坏对最终撞击定位所带来的误差减少了。

-<结论>-
基于插值参考数据库和模糊证据理论的低速冲击定位算法,以实现传感器损伤下复合材料的精确定位。
首先建立了一个基本的参考数据库。通过双三次方多项式插值可以得到更多的相关系数。
然后,使用模糊证据理论来评估FBG传感器的可靠性。损坏的传感器对定位结果的影响被降低。
实验结果表明,所提出的算法的定位性能得到了明显的改善。
当四个传感器都正常运行时,平均误差和最大误差分别为8.6毫米和19.5毫米。
当其中一个传感器损坏时,平均误差为18.9毫米,是传统参考数据库算法的40.9%;最大误差为30.2毫米,是传统参考数据库算法的35.3%。
根据比较,定位结果比其他算法的结果小得多。因此,所提出的算法具有很强的处理受损传感器信号的能力。
由于所提出的算法可以实现传感器损伤下的冲击定位,因此可以为飞行员和维修工程师提供更可靠和准确的检查信息,这对复合材料的航空应用具有重要意义。

