*本文只做阅读笔记分享*
一、神奇的仿生假肢手诞生记
大家好!今天来给大家介绍一款具有神经形态触觉感应的天然仿生假肢手!现在全球的科技都在飞速发展,假肢技术也不例外。在假肢领域,以前大家想做出像人手一样好用的假肢,可费了不少劲。人类的手结构超精妙,是软和硬的结合,抓东西又稳又灵活,还能通过触觉感受各种信息。但以前的仿生手,要么软的不够好,要么硬的差点意思,还没有特别好的触觉感应。
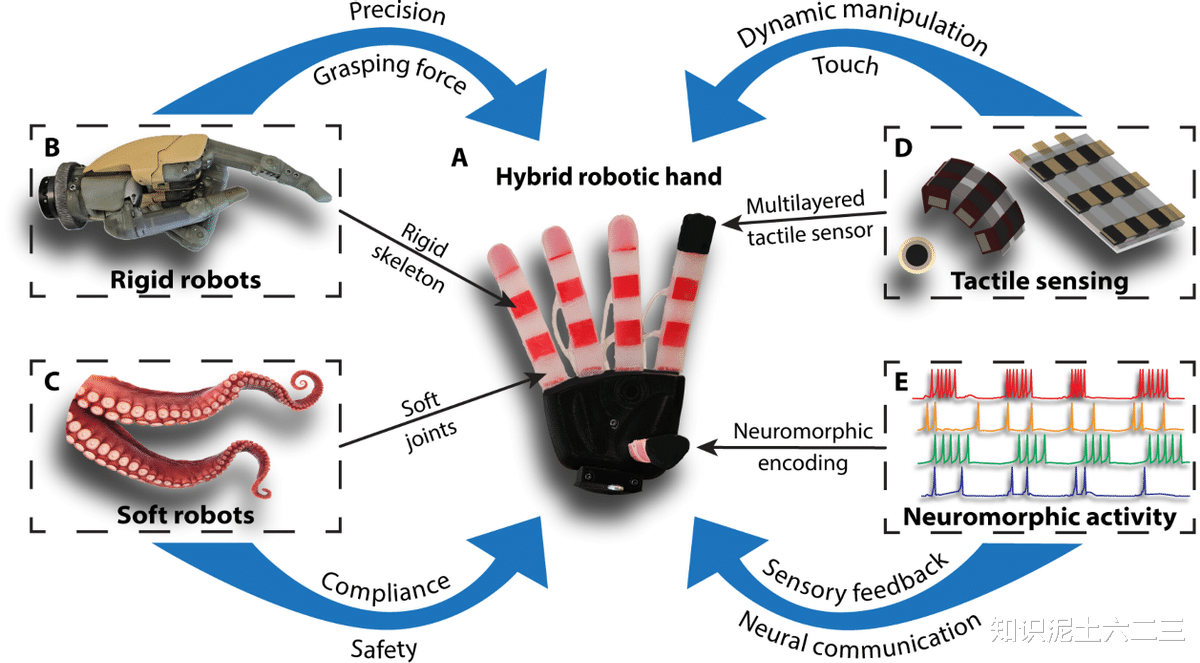
这款仿生假肢手就不一样啦!它是受到人类手部结构的启发,把软机器人和硬骨架结合在一起,还加上了三层像人类皮肤触觉感受器一样的神经形态触觉感应层。你看,它就像一个融合了各种优点的“超级手”,既有软机器人的灵活和安全,又有硬机器人的力量和精准,还能像我们的手一样感知周围的东西。它的出现,就是为了帮助上肢缺失的朋友们,让他们能更自然地抓取物体,重新感受生活的美好。
二、探秘仿生手指的独特构造
先来说说这仿生手的“小零件”——仿生手指。它的设计灵感直接来源于人类手指,把软和硬的部分搭配得恰到好处。它有三个能独立活动的软机器人关节,是用一种叫DragonSkin10硅胶做的,软软弹弹的;关节中间呢,是3D打印的PLA硬骨架,就像我们手指里的骨头一样,给整个手指提供支撑。这样的组合,让手指既能灵活弯曲,又有足够的力量。

再看看指尖,它外面是一层软硅胶,里面藏着一个多层触觉传感器。这个传感器可不简单,是模仿人类皮肤里的触觉感受器设计的。最外层就像皮肤的表皮,能感受轻轻的触摸和低频振动;中间层和内层就像皮肤的真皮层,能感知变形、高频振动和瞬间压力。而且每个传感器层都有不同数量和大小的感应单元,就像一个个小“侦察兵”,能精准地收集各种触觉信息,帮助我们更好地感知物体的表面纹理和形状。

三、多层触觉传感器的神奇魔力
这个多层触觉传感器真的是仿生手的“秘密武器”!它的每一层都有独特的功能。最外层的传感器有九个小小的感应单元,每个只有4平方毫米,它们对轻微的触摸特别敏感,就像我们用手指轻轻触碰东西时,能马上感觉到一样。中间层有六个稍大一点的感应单元,每个6平方毫米,主要负责感知物体的变形,比如我们捏东西的时候,它就能察觉到物体形状的变化。最里面的压电传感器,就像一个“振动小雷达”,能捕捉到高频振动和瞬间压力,比如我们敲东西时产生的振动。
这些传感器协同工作,就像一个配合默契的团队。当手指触摸物体时,不同的传感器层会根据物体的特点做出相应的反应。比如摸一个表面粗糙的物体,外层传感器能感受到表面的凸起,中间层能感知到按压时物体的变形,内层传感器则能捕捉到触摸时产生的微小振动。这些信息综合起来,仿生手就能清楚地“知道”这个物体是什么样的,是不是很神奇!
四、神经形态编码:仿生手的“智慧大脑”
仿生手还有一个很厉害的“大脑”,就是神经形态编码。它能把触觉传感器收集到的信息,按照人类手部神经的工作方式进行处理。就像我们的大脑会把触觉信息转化为神经信号一样,仿生手利用Izhikevich神经元模型框架,把传感器的模拟信号转化为类似神经脉冲的信号。

不同的神经元模型对应着不同的触觉感受器。比如,模拟Merkel细胞的模型,就像我们皮肤里专门感受轻微触摸的“小卫士”,会持续对触摸刺激做出反应;而模拟Meissner corpuscles的模型,就像一个“振动探测器”,只在触摸开始和结束时,也就是有振动变化的时候才会有反应。通过这样的神经形态编码,仿生手能更高效地处理触觉信息,还能和机器学习技术一起合作,准确地识别不同的物体纹理。
五、仿生手指的性能大揭秘
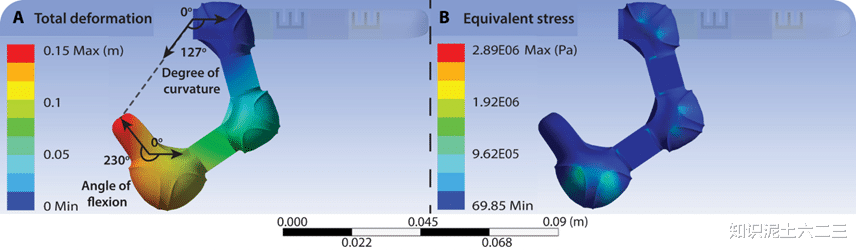
为了让仿生手更好用,科学家们对仿生手指做了好多测试(结合图4讲解)。首先是有限元分析,就像是给手指做了一个“虚拟体检”,用专业软件看看它在各种情况下的表现。结果发现,在7psi的压力下,仿生手指能弯曲到127°,还能实现230°的flexion,而且没有出现任何损坏的迹象。
实际测试中,仿生手指的表现也相当出色。在同样7psi的压力下,它能弯曲到130°,实现208°的flexion,比那些纯软的机器人手指厉害多啦!而且它的力量也很强,能输出1.8N的弯曲力,是软手指的三倍多,虽然和人类手指的力量还有点差距,但已经很了不起啦!另外,它的多层触觉传感器也非常稳定,经过1000次测试,都能稳定地工作,为仿生手提供可靠的触觉信息。

六、仿生手的“火眼金睛”:纹理识别大挑战
仿生手在识别物体纹理方面,简直就是“火眼金睛”!科学家们找来了软机器人手指和传统刚性假肢手指,和仿生手指一起进行纹理识别大比拼。他们准备了26种不同纹理的板子,有软的,有硬的,表面的纹理也各种各样。

测试结果让人惊叹,仿生手指凭借多层触觉传感器和神经形态编码,对这些纹理的识别准确率高达98.38%,而软手指和刚性手指的准确率只有82.31%和83.02%。这是因为仿生手指能在保持灵活的同时,施加更稳定的压力,让传感器更好地收集纹理信息。

而且,科学家们还发现,仿生手的每一层传感器都很重要,单独用外层传感器,仿生手指的识别准确率就能达到87.97%,比其他两种手指都高;把不同层的传感器组合起来,识别准确率就更高啦,说明每一层都能提供独特的纹理信息,帮助仿生手更准确地识别物体。

七、仿生手的“十八般武艺”:多样抓取展示
现在,把这些厉害的仿生手指组合起来,就成了仿生手。它的构造和人类的手很相似,有五个手指,每个手指都能灵活活动,还能做出各种抓握动作。
科学家们用它进行了各种抓取测试,发现它的本领可真不少!用球形抓握,它能轻松抓起一个球;用捏握,能稳稳地拿起一个143克的重金属板;它还会像我们握手一样,用有力的抓握和人互动;用三脚架抓握可以握住螺丝刀,用圆柱形抓握能拿起圆柱体。而且,它不仅能抓重的东西,还能轻柔地拿起像塑料杯、毛绒玩具这样的易碎或柔软物品,甚至能拿起装满水的塑料杯,还不会把杯子弄变形,真的超级厉害!

仿生手还能通过肌电图(EMG)来控制。就像我们大脑给手部肌肉发送信号一样,上肢缺失的人可以通过残留肌肉的电信号,让仿生手做出相应的动作,就好像这只手真的是自己身体的一部分一样。

八、仿生手在日常物品识别中的出色表现
仿生手在识别日常物品方面也表现得非常出色(结合图6讲解)。科学家们让它抓取15种不同的日常物品,这些物品的表面纹理和柔软度都不一样,像苹果、毛绒玩具、金属水瓶等等。仿生手利用多层触觉传感器,在抓取过程中就能感知物体的表面信息,然后进行识别。

结果显示,它对这些物品的识别准确率高达99.69%,几乎不会出错!只有在识别菠萝的时候,出现了一点点混淆。通过分析发现,对于这些日常物品,仿生手的SA1和SA2编码的传感器层表现更好,因为日常物品大多不需要高频率的振动感知,更需要感知物体的柔软度和表面的一些基本特征。这也说明,仿生手的多层触觉传感器能根据不同的任务,发挥不同的作用,就像我们人类的手一样,能适应各种复杂的情况。

九、对这款仿生假肢手的展望
该研究展示了混合机器人的优势,但仿生手在力量等方面仍需改进。多层触觉传感器设计巧妙,但可进一步优化。神经形态编码有潜力提供自然触觉反馈。未来研究可聚焦于闭环控制和改进手指设计,提升仿生手性能。
十、一起来做做题吧
1、关于仿生手的设计灵感,以下说法正确的是?
A. 仅来源于软机器人的灵活性
B. 模仿人类手部的软硬结合结构和触觉感知机制
C. 主要参考刚性机器人的强大抓力
D. 源于对生物肢体运动的简单模仿
2、仿生手指中,多层触觉传感器的外层主要模拟人类皮肤中的哪些触觉感受器?
A. Ruffini endings 和 Pacinian corpuscles
B. Merkel cells 和 Meissner corpuscles
C. 仅 Merkel cells
D. 仅 Meissner corpuscles
3、在纹理分类任务中,仿生手指相比软手指和刚性手指的优势在于?
A. 能施加更稳定的压力且更灵活
B. 结构更简单
C. 制作成本更低
D. 外观更接近人类手指
4、仿生手能够实现多种抓握模式的关键原因是?
A. 有先进的控制软件
B. 采用了特殊的材料
C. 仿生手指的设计及刚性与柔性的结合
D. 具备强大的动力系统
5、关于仿生手的神经形态编码,下列说法错误的是?
A. 能提高计算效率
B. 模拟人类手部神经的工作方式处理触觉信息
C. 对所有纹理的识别准确率都一样
D. 可通过神经刺激为假肢使用者提供自然触觉反馈
参考文献:
Sriramana Sankar et al. A natural biomimetic prosthetic hand with neuromorphic tactile sensing for precise and compliant grasping. Sci. Adv.11, eadr9300(2025).
