作者 | 程茜
编辑 | 心缘
智东西10月31日报道,就在昨天,波士顿动力放出了人形机器人Atlas在工厂已经上岗就业的视频。视频中的Atlas可以自主在两个地点移动,将汽车的发动机盖放到准确的位置。

▲波士顿动力Atlas在工厂搬运零件
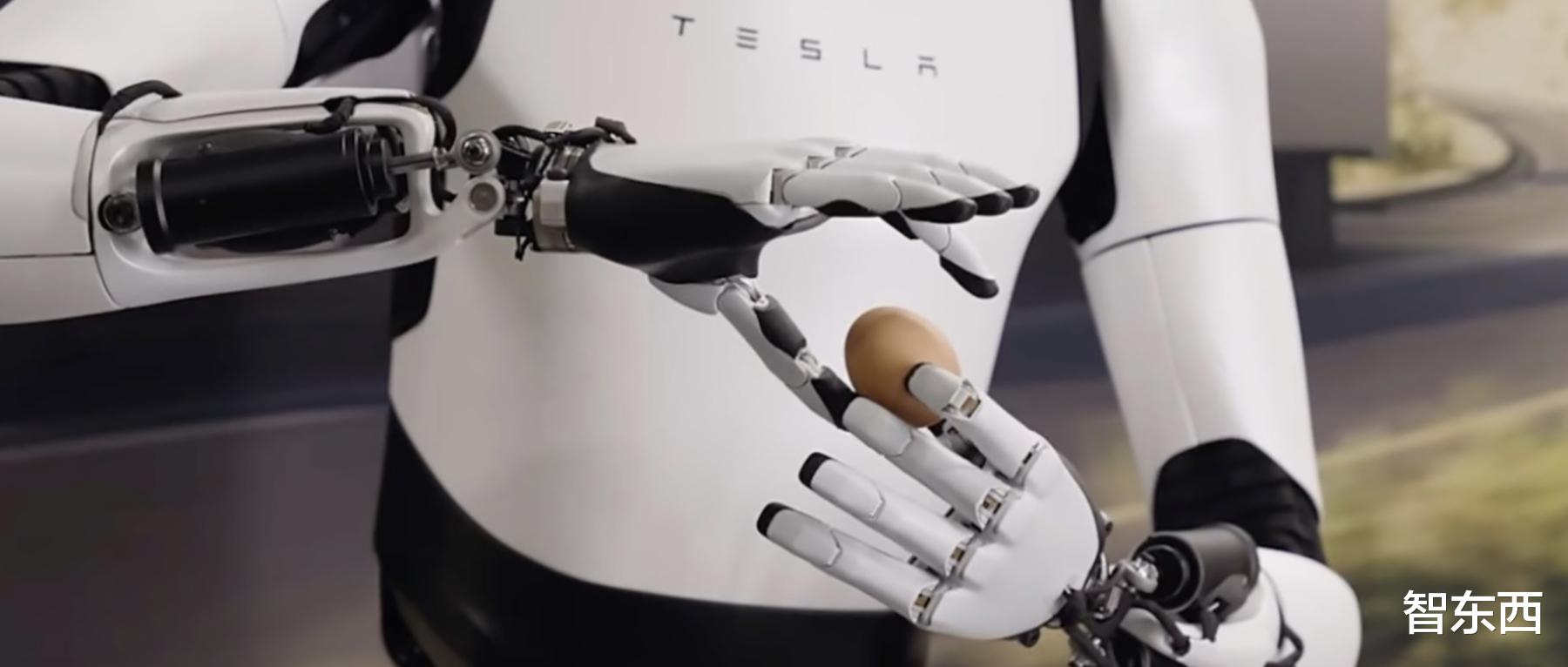
还有前不久的特斯拉数十台擎天柱(Optimus)机器人,也展现出超强运动控制能力。它们在发布会现场与观众亲切交谈,说话时伴随着手部动作,还能倒饮料、提袋子、递送。

▲特斯拉擎天柱演示(图源:特斯拉)
上述两个场景中,人形机器人下肢的移动能力和稳定性已经基本可以应对各种环境,能让其搬运重物、递饮料或者叠衣服、拧螺丝的关键就是机器人最末端的灵巧手,这也是机器人研发最难的一环。
当下,评判灵巧手性能的最重要一个标准就是自由度,目前市面上灵巧手的自由度在6-42个之间,其中以6个自由度为主流,这也导致相比于人手的27个自由度,当下人形机器人的精细化操作能力欠缺。
但自由度又与灵巧手成本相关。英国仿生灵巧手老牌企业Shadow Robot的Shadow灵巧手系列自由度已经达到24个,拥有超100个传感器,但售价达到100万~220万元,价格甚至比马斯克预计的人形机器人本体价格高10倍,马斯克预计售价2万~3万美元(折合约14~21万人民币)。

▲Shadow Robot的Shadow灵巧手(图源:Shadow Robot)
现在人行机器人产业链发展逐渐细分,从整机到专攻关键零部件的企业涌现,灵巧手就是近年来兴起的人形机器人产业中非常关键的一类产业链细分方向。
国内灵巧手产业涌现出灵巧手企业/创企、人形机器人创企、高校与科研机构三类企业,正试图找到其性能和成本的平衡点。目前已公开售价的产品价格在0.99万元~11万元不等,其中一个代表性企业就是灵巧手创企灵心巧手,据了解,该公司的灵巧手自由度目前已经达到业界最高42个,其公开售卖的20个主动自由度灵巧手价格仅为4.99万元。

▲2024科技创变者大会灵心巧手联合创始人、CTO周永公布灵巧手价格
不过,这对于人形机器人的商业化落地而言远远不够。想要达到类比人类的灵巧手性能,还需要更多传感器获取数据作为执行任务的依据。
还有让其实现批量生产的难题在于,灵巧手采用的电机等核心零部件价格高,使得单个灵巧手内电机成本在2.6万~6.5万元之间;以及其内部核心零部件在性能、轻量化和成本之间的平衡。
智东西试图深入灵巧手市场,找到人形机器人商业化落地的突破口。
一、人形机器人“心灵手巧”关键,占整机成本14%清华大学计算机系教授、智能技术与系统国家重点实验室副主任孙富春曾提到:“机器人是自动化的‘最后一公里’,灵巧手是机器人‘最后的一厘米’。”
灵巧手是模仿人手设计的高精度机械手,工业机器人领域的灵巧手大多采用三指设计,而人形机器人大多为五指。灵巧手是实现精细操作的基础,因为一旦其需要进行精细装配、拿取微小零件等,简单的抓夹、吸盘就无法做到。与人形态更相近的人形机器人,更是需要完成抓、握、捏、拧、旋转等不同动作,满足多元化的场景需求。
因为灵巧手的设计仿照人手,人体解剖学著作《格兰特解剖学图谱》中写道,人手本体自由度为21个,加上手腕关节运动自由度有27个。因此在自由度的分配上,灵巧手也仿照了人手。

▲人手解剖学示意图(图源:知乎博主任赜宇,此前担任珞石机器人首席系统工程师)
从运动学角度来看,灵巧手需满足两个必要条件:在指关节运动时使物体产生任意运动、指关节固定时能完全限制物体运动,所以在此基础上,灵巧手需要至少3根手指、9个自由度。
目前,从形态来看,灵巧手主要有五指和三指两种,也有人形机器人厂商选择从二指、三指夹爪向灵巧手过渡,以满足当下机器人的应用需求。从其自由度数量来看,正好处于6个-42个之间。
人形机器人的商业化落地方面,灵巧手的重要性也不容忽视。虽然体积并不大,但其成本占到人形机器人整体成本的14%~18%。摩根士丹利的数据显示,特斯拉第二代人形机器人擎天柱灵巧手占比达到17.3%,以其整机成本5万~6万美元(折合约35万~43万人民币)计算,灵巧手的成本在8650美元~10380美元(折合约6万~7.3万人民币)之间。
灵巧手是机器人与外界交互时获得触觉反馈的关键。灵巧手上搭载的触觉传感器、力传感器,可以帮助机器人感受物体的形状、大小、硬度、温度等,而不是仅通过视觉交互。
一个典型的灵巧手系统的关键部分包括驱动、传动、传感器和控制系统。驱动系统负责提供动力,传动系统将这些动力转换为手指关节运动,然后触觉系统用于感知手部与外界物体的接触状态和力度,控制系统是通过算法和软件对驱动系统和传动系统进行控制。

▲灵巧手的抓握示意图(图源:因时机器人)
这一波人形机器人热潮催化下,作为其关键部件之一的灵巧手,原先多用于科研、假肢等领域的灵巧手,并在单独做灵巧手的企业之外,衍生出人形机器人赛道的产业玩家。
二、三类玩家竞逐,国产灵巧手售价降到低于万元当下在这一赛道角逐的共有三类玩家:人形机器人创企、灵巧手创企、科研机构。其中,非人形机器人玩家的灵巧手产品均为公开售卖,科研机构以技术研发为主,人形机器人创企又分为仅自研以及同时支撑自研、单独售卖的。
1、灵巧手企业/创企:最低售价不到万元,最高自由度可达42个
国内专门做灵巧手的企业/创企中,目前已公开售价的产品价格在0.99万元~11万元不等。
其中,因时机器人、强脑科技、傲意科技等玩家的灵巧手均有6个自由度,大多只能完成手指向内抓取物体的动作,手指左右晃动等动作无法完成。因时机器人市场总监房海南谈道,其灵巧手自由度为6个,是综合灵巧手成本、可靠稳定性、综合量产能力、抓取效果来综合选择的方案。这也是当下产业中大家都选择6个自由度的原因,可以基本上完成人手的60%~70%的抓取任务。
据房海南在2024科技创变者大会上透露,截至今年8月,因时机器人的灵巧手累计出货量已经达到几千台,其中人形机器人的灵巧手销售额已经达到一半以上。
与大多数玩家的灵巧手不同,灵心巧手的LinkerHand系列灵巧手主动自由度在12~42个之间,单指为2~7个。灵心巧手联合创始人、CTO周永认为,灵巧手需要达到20个以上的自由度才能完全映射人类动作,多传感器需要能够感知到位、力、触、摸。

▲LinkerHand灵巧手演示(图源:灵心巧手)
该公司SE版的灵巧手是目前国内灵巧手唯一价格在万元之下的,不过该公司并未公布其具体参数;Pro版的主动自由度为20个,售价4.99万元。此外,其系列产品还实现了360度自由旋转,并配备了指尖摄像头、触觉传感器、位置传感器、力传感器等多传感器系统。

▲单独售卖灵巧手的企业/创企(整理自公开信息,智东西制表)
2、人形机器人创企:多为支撑本体自研,仅两家单独售卖
这类企业中公开售卖灵巧手的玩家有钛虎机器人、帕西尼感知两家。
钛虎机器人的灵巧手单只价格在2万元左右,不过如果要增加更多传感器,售价可能会提升至3万~4万元之间。其灵巧手有6个自由度,每个手指都可以独立运动,其中大拇指能进行两个方向运动,其灵巧手与钛虎机器人的人形机器人系列手部自由度一致。
与其他厂商不同,帕西尼感知的灵巧手更注重多维触觉传感,其第二代灵巧手DexH13拥有13个自由度,单手拥有978个ITPU多维触觉传感单元,15种多维触觉感知能力。
第二代多维触觉人形机器人ORA-ONE双手集成近2000个自研的ITPU多维触觉传感单元,能瞬间捕捉并解析接触面上细微形变与多维度触感信息,其灵巧手自由度已经提升至26个。
其余人形机器人创企自研的灵巧手自由度大多为6个、12个,且仅用于支撑自家人形机器人研发。

▲人形机器人创企灵巧手研发、价格梳理(整理自公开信息,智东西制表)
全球爆火的特斯拉擎天柱灵巧手自由度也是如此。特斯拉去年年底发布的第二代擎天柱的灵巧手拥有11个自由度,10月11日,特斯拉CEO埃隆·马斯克透露,其下一代Optimus的手将拥有22个自由度。
其余OpenAI大模型加持的Figure 01与波士顿动力的Atlas目前并没有公开自家机器人灵巧手的自由度;小米铁大的手为双指抓夹,只能夹取物体。
3、科研机构、高校:专注于提升自由度、负载能力
除此以外,还有哈尔滨工业大学、中国科学院自动化研究所、清华大学AI智能研究员智能机器人、腾讯Robotics X实验室等科研机构和高校,专注于灵巧手的研发。
其中,中国科学院自动化研究所的神经拟态灵巧手机器人CasiaHand,具有25关节自由度、21驱动自由度,还包括五个手指、掌部和腕部,仿人筋腱驱动方式,指尖仿人触觉感知能力,位置、力、触觉、温度多模态传感93个。
此外,其研发重点还有灵巧手的负载能力,目前市面上单个灵巧手的负载集中于3kg~5kg,中国科学院自动化研究所的团队已经研发出负载7kg的版本,下一步计划将负载提升到15kg以上。

▲高校、科研机构灵巧手研发情况(整理自公开信息,智东西制表)
可以看出,这些研究机构对于灵巧手的研发,多集中在自由度提升、传感器数量、负载能力方面。
三、灵巧手瓶颈:单手空心杯电机成本6.5万,一只手塞上百个传感器20世纪70年代末,工业自动化需求增长,灵巧手的概念出现。
早期,灵巧手发展的典型代表就是日本“电子技术实验室”的Okada灵巧手,其拇指有3个自由度,另外2个手指各4个自由度;美国斯坦福大学的Stanford/JPL灵巧手,也是拥有3个手指,每个各有3自由度;美国麻省理工学院和犹他大学研制的Utah/MIT灵巧手有4个手指,每个4个自由度。

▲从左至右分别为Okada灵巧手、Stanford/JPL灵巧手、Utah/MIT灵巧手(图源:小米技术)
发展至今,这一产业有几大明显的趋势。除了自由度提升外,灵巧手搭载的传感器数量翻番,驱动方式选择上除性能外会兼顾商业化等。
首先其搭载的传感器数量翻番。20世纪末,产业开始关注灵巧手的感知能力进阶,当时德国宇航中心研发的DLR-Ⅰ和DLR-Ⅱ灵巧手共集成了25个传感器,现在灵巧手的传感器数量已经达到近百个。传感器监测到的数据就是控制算法进行决策的依据。戴盟机器人首席科学家王煜教授说,灵巧手接触到物体时的反馈是非常重要,没有主动的反馈就没有灵巧操作,灵巧手的发展就卡在这里。
因此要让灵巧手收集到更多的高质量数据带来的挑战就有两大方面,一是传感器数量增加对应着灵巧手的成本增加,二是面对大量数据,控制算法处理复杂任务时响应速度会变慢,无法实现精准、高效控制。
其次,当下单价较高的电机驱动已经成为灵巧手的主流技术方向。除了性能优势外,电机驱动的技术较为成熟,相关零部件和控制系统已经形成一定的标准和规划,便于进行大规模量产。
灵巧手内部空心杯电机数量不断提升,但单个空心杯电机的价格并不低。国外驱动系统供应商Maxon的空心杯电机单价为4675元,爱采购页面显示,国内兆威机电空心杯电机的单价在2000元左右。

▲兆威机电的空心杯电机价格(图源:爱采购)
一般情况下,灵巧手的自由度与驱动电机相对应,如果折中计算,假设单个灵巧手的自由度为13,对应驱动电机需要13个,成本已经达到2.6万~6.5万元之间。
这一市场长期被国外巨头所垄断,不过目前国内鸣志电器、伟创电气、雷赛智能、兆威机电等企业也推出了空心杯电机相关产品,其中,伟创电气在回复投资者问时透露,该公司在空心杯电机产品方面可以提供完整的模组解决方案,适用于灵巧手10mm的空心杯电机模组正在推向市场,已经取得小批量订单。不过,整体来看,国内对于机械结构等要求更加严格的人形机器人应用,其性能距离头部玩家仍有一定差距。
第三,这些趋势都显示灵巧手的内部结构零部件数量越来越多、机械结构逐渐精密,但还有一大前提是其本身体积并不大,如何平衡零部件数量、性能与小型化、轻量化之间的关系,也是这一产业发展的一大瓶颈。
上个月,Shadow Robot总监里奇·沃克(Rich Walker)曾在接受《卫报》采访时谈道,机器人灵巧性的挑战之一就是体积。Shadow灵巧手的大小与人的手掌相当,有四根手指和一根拇指,但其需要连在比人类手臂宽得多的机械臂上,用以承载电缆、执行器等诸多部件。
这是因为灵巧手想要达到人手的操作水平,需要安装多个关节、传感器、传动装置等。其中电机数量要与关节数量一致,才能达到全驱动,实现对灵巧手的精准控制。
目前一些企业为了控制灵巧手内部的电机数量,会同时采用全驱动和欠驱动方式,欠驱动指的就是没有提供对应的驱动器数量,而是基于其它外部力量驱动。但欠驱动系统容错能力较差,需要更加准确的动态模型和控制算法,这也增加了灵巧手运动过程的风险。
最后还有诸如关节耐久性、重量等,是之后人形机器人实现大规模应用,走进真实落地场景过程中需要一直考量的难题。
目前国内已经诞生了专门做灵巧手的玩家,并且已经拥有一定的价格优势,在当下可匹配人形机器人的应用场景。
结语:人形机器人落地前夜,灵巧手迎千亿市场从当下人形机器人市场的发展来看,其在下肢能力的进展飞速,诸如跑跳、走路等都有了较大突破,但对上肢而言,其灵巧手不仅是机器人实现精细操作的关键,同时也是让人形机器人降本,真正实现量产的关键。市场调研机构头豹研究院的报告显示,根据特斯拉预测,人形机器人将于3-5年达成量产,量产后,灵巧手市场将爆发式增长,预计2030年将突破800亿元。
具体而言,从材料、核心电机到传感器、雷达等感知系统,灵巧手都需要技术创新和成本控制。但宏观来看,这些零部件和系统在人形机器人的其他部件上也有应用,因此这同样可以带动整个人形机器人技术的进步。
参考资料:小米技术公众号《机器人中的“百达翡丽” — 五指精密仿生灵巧手技术浅析》
