导 读
传感器作为机器人感知外界环境的关键部位,在人形机器人系统中处于重要地位。六维力/力矩传感器通常安装于机器人末端执行器与机械臂之间,用于检测作业中的机器人与环境之间的多维交互力/力矩,并将交互力/力矩反馈给机器人力控制系统。根据中国电子报,相较于工业机器人,人形机器人手部的受力方向更复杂,因此有业界人士认为,手部的力量感知应该用六维力传感器实现。
1
什么是六维力传感器?
根据海伯森技术有限公司官方账号,六维力传感器主要是利用应变计和电荷放大器将机械力矩转化为电信号。通常包含一个弹性体和多个应变计。当传感器受到力或力矩时,弹性体的形状会发生微小变化,导致应变计电阻值的微小变化。这些变化被电荷放大器放大并转化为数字信号,以便在计算机上处理和记录。

六维力传感器包含感应结构和数据处理结构两部分,工作原理为应变效应。其中感应结构具体分为上台(内圈)、下台(外圈)、测力梁(弹性体)、应变片、应变电桥、信号调理电路,数据处理结构包括数据采集及 A/D 转换和数据处理模块等。
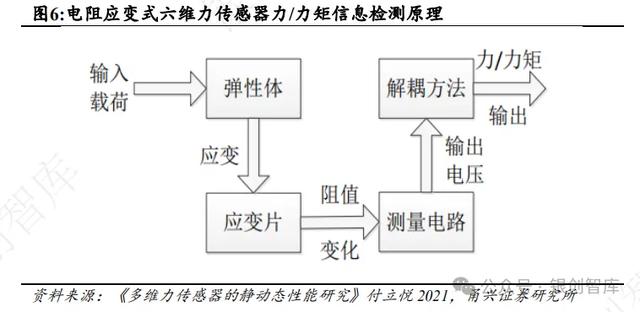
电阻式应用最广,核心为弹性体结构设计
多维力传感器按照工作原理可以分为电阻式、压电式、光电式、电容式、霍尔式等。电阻式多维力传感器以金属箔式电阻应变片或半导体应变片作为敏感元件,利用金属的应变效应或半导体的压阻效应实现应变测量的一类传感器。电阻式在多维力传感器应用广泛。它具有灵敏度高、测量范围大、可靠性高、技术成熟等优点。但同时也存在动态响应差、外界因素对应变电桥影响大等缺点。设计该类传感器的关键是设计合理的弹性体结构。
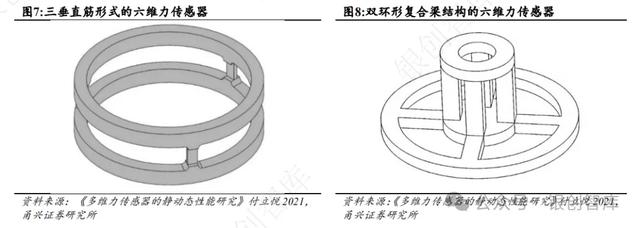

六维力/力矩传感器的核心单元是弹性体,弹性体的结构设计影响着传感器的灵敏度、动态性能、维间耦合等关键性能参数。根据现有国内外研究成果,六维力/力矩传感器弹性体的结构主要集中在一体化结构和 Stewart并联结构两种。一体化结构的六维力传感器包括竖梁式、横梁式、复合梁式、圆筒式等,其中十字型弹性体对称性好,兼顾了横向和竖向的应变效果十字梁与轮缘之间为柔性连接,从而简化了力学模型,该结构实际使用效果较好,被广泛使用。

参数较多,其中串扰、精度和准度为核心参数
根据俊德科技官网,六维力/力矩传感器的主要参数包括:满量程、满量程输出、灵敏度、解耦矩阵、非线性、迟滞、串扰、零点、精度、分辨率、过载能力、温漂、准度。


根据坤维科技官方公众号,体现六维力/力矩传感器综合性能的关键指标有串扰、精度和准度。串扰指标用来衡量多维力传感器各测量方向间的耦合影响,可以反映测量误差水平。比较优秀的串扰指标在 1%FS 左右,2-5%FS 比较常见。分别对六维力传感器的六个测量方向精确加载至各自的额定载荷,记录六个方向的测量结果。

根据坤维科技官方公众号,常用精度和准度这两个指标描述六维力传感器具体的测量误差水平。多维力传感器精度衡量的是测量结果之间的重复性,其检定方法是,在相同环境条件下,在额定载荷范围内,进行多次重复联合加载相同一组载荷后,计算得到的传感器测量值的标准差,并除以量程。多维力传感器准度衡量的是测量结果与理论真值的偏离程度。其获得的方法是,对传感器进行多组多维联合加载,计算得到的传感器测量值与所加载荷理论真值之间的标准偏差,并除以量程。其中,准度涵盖了滞后、线性、蠕变等误差因素,更能体现产品的综合性能,是多维力传感器最为核心的技术指标之一。
技术壁垒
根据坤维科技官方公众号,对于六维力传感器而言,标定需要同时考虑六个维度。一般来说,校准和标定的方法和内容基本相同、设备一致,都需要采用六维联合加载的方式,即三方向的力和三方向的力矩同时加载。六维联合加载标定的样本空间过于复杂,一维力传感器只需 9 个样本点来标定,六维力传感器的样本空间则包含 531441 个样本点。

根据坤维科技官方公众号,采用六维力联合加载标定/检测能使传感器准度更好、串扰更低。六维力传感器在承受多个维度力的同时作用时,非线性特征显著,而六个维度的线性模型单纯叠加无法精确描述,因此多样本的六维联合加载具有三点优势:(1)交叉样本点可以使传感器的受力情况模拟更接近真实的使用情况;(2)有利于考察传感器在多维载荷同时作用下的非线性力学特性,进而有效改善传感器结构的设计;(3)基于传感器非线性力学特性做的标定,可以大幅优化解耦算法的数学模型。
六维力/力矩传感器提升性能、降低误差的关键是消除维间耦合。理想的六维力传感器每个通道的输出只与本通道的加载力/力矩相关,与其他通道无关。但实际上由于弹性体的机械机构、传感器的机械加工精度、应变片粘贴技术、测量方法等原因,使得每个施加在传感器的力/力矩都会对其它输出信号产生影响,即维间耦合。只有解决维间耦合问题,才能实现六维力力矩的精确衡量。在平衡静/动态性能同时,消除维间耦合的解耦方法常见有两种:
(1)硬件解耦:六维力/力矩传感器的结构受到其应用场合的限制,而弹性体的形式和布置将直接影响到传感器的灵敏度、刚度、线性度、动态性能、维间耦合等,传感器性能的优劣很大程度上由此决定。其中,浮动梁结构和滑移结构就是典型的机械解耦形式。
(2)软件解耦:利用软件算法实现解耦。由于不同通道的输入、输出数据之间并不总是线性的,因此人工神经网络算法逐渐取代前者被广泛应用于多维力传感器的静态解耦中,其中基于 BP 神经网络的非线性解耦算法最为常见。

根据坤维科技官方公众号,六维联合加载设备目前还没有标准产品可以直接采购,一般都是由六维力传感器的厂商自行研制的。六维联合加载设备的研发涉及到空间光学定位、载荷位移补偿、机电一体化等多项综合技术,有上百个 Know How,非常依赖工程经验。一旦某个细节考虑不周全,加载效果就会不理想,加载设备自己产生的耦合误差可能超过 1%FS,这将无法标定出高准度的六维力传感器。
2
六维力传感器下游应用
六维力传感器应用场景广泛
六维力/力矩传感器以其能够感知外力和外力矩的全部信息而成为最重要的一类力传感器,根据海伯森技术,目前广泛应用于汽车行业的碰撞测试、轮毂、座椅等零部件测试以及基于力触觉的人机交互、类人机器人、生物医学研究、医疗机械、航空航天等领域。具体应用如下:
工业制造:(1)机器人控制。六维力传感器可以通过测量机器人末端的力和力矩,帮助机器人实现高精度的控制与操作;(2)质量检测。在制造商进行质量检测时,六维力传感器可以用于测试产品的强度、耐久性和固定性等指标;(3)加工过程监控。六维力传感器可以用于检测切削力、刀具磨损情况并及时反馈数据给操作者;(4)设备测试。六维力传感器可以被嵌入到各类设备用来测试这些设备对压力和扭矩的响应和稳定性;(5)汽车工业。在汽车制造中,六维力传感器可以用于测试引擎、变速器、转向装置等各种零部件的性能,协助汽车制造商开发更节能、更安全、更可靠的车辆。

科研实验:(1)材料性能测试。六维力传感器可以用于测量材料在受力作用下的强度、刚度、塑性变形等性能参数,以便科研工作者进行材料性能评估与优化;(2)生物医学研究。六维力传感器可以用于测量生物组织或细胞在不同力作用下的变形、应力分布等参数,探索生物系统的机制和性质;(3)机器人技术研究。六维力传感器被嵌入到机器人的末端执行器,实现高精度机器人控制与操作;(4)航空航天工程研究。六维力传感器可以用于测试航空航天器在不同状态下的受力情况,以检测其设计是否合理,并提供数据支持以便优化;(5)物理实验。六维力传感器可以用于测量物体位置、方向、速度、加速度等参数。

医疗领域:(1)手术辅助系统。可以用于手术机器人帮助医生更加准确、安全的手术操作;(2)运动康复、功能性评估。六维力传感器可以用于测量运动康复患者的肌肉力量、关节稳定性等参数来评估其康复情况,并根据测试结果制定治疗方案;(3)步态分析、姿势评估。六维力传感器可以被用于步态分析系统和姿势评估系统,来帮助医生诊断和治疗运动障碍、神经损伤以及脊柱侧弯、平衡障碍等问题。
力传感器市场规模
根据 Global Information,2023 年全球力传感器市场规模达到 27 亿美元。IMARC Group 预计到 2032 年市场规模将达到 41 亿美元,2024-2032 年复合年增长率(CAGR)为 4.54%。由于电动车 (EV) 销量的成长、各种制造流程的自动化程度不断提高以提高效率和生产力,以及消费性电子产品和穿戴式装置的日益普及,该市场正在经历稳定成长。

高工机器人产业研究所(GGII)数据显示,2022 年中国市场六维力/力矩传感器销量 8360 套,同比增长 57.97%,其中机器人行业销售 4840 套,同比增长 62.58%。其预测到 2027 年中国市场六维力/力传感器销量有望突破 84000 套,复合增长率超过 60%,其中机器人行业销售有望突破 42000套;市场规模方面:GGII 数据显示,2022 年中国六维力/力矩传感器市场规模 2.39 亿元,同比增长 52.04%,其中机器人行业六维力/力矩传感器市场规模 1.56 亿,同比增长 54.35%。GGII 预计,2027 年中国六维力/力矩传感器市场规模将超过 15 亿元,CAGR 超过 45%。

根据优必选招股书,在其披露生产智能服务机器人的主要原材料中,一些简单的环境光传感器平均价格仅为 0.4 元人民币,而更高端的传感器如六维力传感器的价格可超过 15000 元人民币。
3
人形机器人核心零部件,有望迎来广阔市场空间
传感器作为机器人感知外界环境的关键部位,在人形机器人系统中处于重要地位。在众多可感知的外界信息中,如视觉、听觉、嗅觉、力觉等,力觉感知能获取机器人与外界环境之间的相互作用力,是机器人最为基础和关键的环境信息获取方法之一。力觉信息的准确获取,是机器人对环境状态的认知和顺利完成后续的力反馈与力控制的基础和前提。
六维力/力矩传感器通常安装于机器人末端执行器与机械臂之间,用于检测作业中的机器人与环境之间的多维交互力/力矩,并将交互力/力矩反馈给机器人力控制系统。比如打磨作业中机器人完成的抓取、测量、移动和放置等动作,需要通过多维力传感器检测机械手与环境的接触力并反馈作用于机器人控制器。

六维力传感器助力人形机器人“行稳致远”
根据特斯拉官方账号,2023 年 12 月特斯拉发布了第二代人形机器人擎天柱 Optimus Gen2 演示视频,视频中机器人用左手的拇指和食指把鸡蛋从纸浆蛋托里拿起来,再用右手的食指和拇指捏住,将鸡蛋稳稳地放到锅里。

根据中国电子报,相较于工业机器人,人形机器人手部的受力方向更复杂,因此有业界人士认为,手部的力量感知应该用六维力传感器实现。坤维科技 CTO 袁明论介绍称:“如果力的方向是固定的,可以采用一维力传感器;如果力作用点与传感器标定参考点重合,但力的方向随机变化,可以用三维力传感器;而如果力的方向和作用点都在三维空间里随机变化,就应该选用六维力传感器进行测量。”

根据优必选官网,优必选是人形机器人的领航企业,是全球极少数具备人形机器人全栈式技术能力的公司。目前拥有 Walker、Walker X 和熊猫机器人优悠三个系列的人形机器人产品,并且旗下的人形机器人均在手腕和脚踝处配置了 4 个六维力/力矩传感器。
精选报告来源:银创智库新能源/新材料/高端装备制造
储能丨锂电丨钠电丨动力电池丨燃料电池丨氢能源丨光伏丨风电丨新能源汽车丨电子元器件丨电机电控丨低空经济丨无人机丨机器人丨工业自动化丨人工智能丨能源金属丨碳中和丨半导体丨集成电路丨芯片丨光刻丨先进封装丨碳化硅丨湿电子化学品丨新材料丨超导材料丨稀土永磁材料丨碳纤维丨高分子
