文 | 煜捷史馆
编辑 | 煜捷史馆
-<氧化石墨烯复合材料>-
近年来,机器人的电子皮肤(eSkin)引起了人们的极大兴趣,因为它对安全操纵和探索物体以及安全的人机互动至关重要。
在新的应用中,如自动驾驶汽车和工业4.0环境中,对触觉反馈的日益关注也促进了电子皮肤技术的进步,接触力或压力和温度是这些应用中需要的最重要参数。
然而,大部分关于电子皮肤传感器的工作都集中在压力或力的感应上,这一点从使用各种有机/无机材料开发的各种压力/力和应变传感器可以看出。
准确测量皮肤温度的变化,对于从健康监测到机器人技术的应用都是必要的。
接下来,煜捷将为你讲述氧化石墨烯复合材料,是通过怎样的渠道提升传感器传输性能的。

在人类中,皮肤温度的变化可用于调查身体活动、心血管健康和其他一些健康诊断方法。
同样,在机器人和假肢应用中,需要测量温度的变化来模仿人类皮肤的功能。例如,一个集成的温度传感器可以帮助机器人区分热和冷的物体。
过去已经报道了各种各样的温度传感器,使用的材料包括半导体、金属、金属氧化物和陶瓷等。
由于电阻式温度传感器的快速反应、稳定性和准确性,其报道最为广泛。
少数eSkin也包括基于硅二极管或晶体管的温度传感器,使用标准的微加工技术开发,这些设备不一定是灵活的。

大多数时候,标准微加工所需的复杂加工和较高的温度不适合柔性基材。在这方面,印刷技术为设备提供了一个有吸引力的替代路线。
人们对印刷电子学的兴趣主要是由于其优点,如大幅降低制造成本,易于在柔性基材上进行大面积印刷,直接在物体上集成电子器件等。
印刷技术的这些优势已被用来开发各种物理传感器(如温度、应变、湿度、射频识别(RFID)标签),能够实时检测和获取数据。
通常情况下,印刷的电阻式温度传感器利用导电的有机聚合物作为感温层。

最广泛使用的感温层包括聚(3,4-亚乙二氧基噻吩):聚(苯乙烯-enesulfonate)(PEDOT:PSS),碳纳米管(CNT),PEDOT:PSS/CNT复合材料,氧化石墨烯(GO),[41],银(Ag),金/铬(Au/Cr)。
它们具有优良的导电性和光学透明度。除了这些特性外,PEDOT:PSS、GO的热活化促进了它们用于温度敏感层。
然而,使用这些材料开发的温度传感器提供了有限的灵敏度(每摄氏度<0.6%)以及缓慢的反应和恢复时间。
在此,我们通过使用一个简单的、具有成本效益的和一步到位的制造路线,在柔性聚酰亚胺(PI)基材上提出了高灵敏度(每摄氏度>1%)的印刷温度传感器。

我们利用导电银(Ag)浆糊作为接触电极,而用GO功能化的PEDOT:PSS(GO/PEDOT:PSS)复合材料作为感温层。
由于银浆与柔性PI有很好的粘附性和电气性能,银浆是所提出的传感器的一种良好的导电材料。
GO的生物相容性、绝缘性和官能团的存在使得导电和温度依赖性强的PEDOT:PSS的功能化成为可能。
在从室温(RT)到100℃的温度范围内,对印刷温度传感器的性能进行了评估。
此外,印刷的传感器被安装在机器人手的拇指上,并有反馈,以识别热的物体。

-<制造和表征>-
A. 材料
Ag导电油墨(186-3600)和PEDOT:PSS分别购自RS组件和Sigma Aldrich,英国。
B. 制造
市面上的PI基材(厚度为60微米)被切割成3厘米×5厘米(长×宽)。
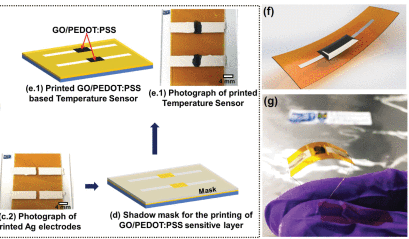
在阴影掩模的帮助下,将银导电油墨印在PI基片上(图(b)),然后在80℃下干燥30分钟(图(c))。

干燥后,每个Ag电极的尺寸为长1.3厘米,宽4毫米,间距为2毫米,使用改良的Hummers方法合成了GO粉末。
在温和的超声处理下,1mg/ml的GO粉末被分散在去离子水中。
最后,将GO分散体和PEDOT:PSS按1:1的比例在1000转/分的持续搅拌下混合30分钟。
之后,如图(d)和图(e)所示,将20微升的GO/PEDOT:PSS墨水滴在Ag/PI上。
图(f)和图(g)分别显示了基于GO/PEDOT:PSS的柔性温度传感器的光学图像和照片。
印刷的柔性器件的敏感层用Kapton胶带(厚度为50μm)进行绝缘,以减少湿度和其他环境因素的影响。
C. 表征
使用LabView控制的Agilent 34461A系列万用表测量了印刷的柔性传感器的电阻随温度变化的情况。
热板的温度是用高精度的红外温度计(FLUKE 62 MAX)校准的。
弯曲测量是使用在其他地方报道的内部构建设置进行的。

-<结果与讨论>-
如图(a)所示,基于GO/PEDOT:PSS印刷的温度传感器的归一化电阻(R/R0,其中R是传感器的电阻,R0是RT时的基底电阻)随时间变化。
最初,传感器被放在一个保持在室温(RT)的热板上,以获得传感器的稳定反应。
在图(a)中可以观察到,在最初的15秒内,R/R0的最小变化为2%。
这种变化可能归因于聚合物基体中的聚合物-GO复合材料由于热系数和有效相对湿度的局部变化而产生的微小的自我调整。
然而,为了尽量减少湿度和其他环境因素的影响,印刷的柔性设备的敏感层用Kapton胶带进行了绝缘。

之后,热板的温度从RT逐渐增加到100℃(称为加热)。一旦热板的温度接近100℃,印刷的GO/PEDOT:PSS显示出约80%的电阻变化。
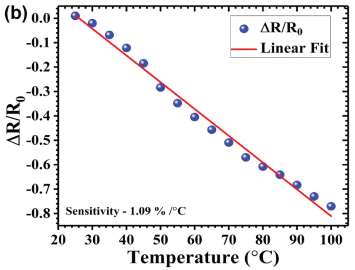
基于传感器的电阻随温度的变化,图(b)显示了传感器的反应(ΔR/R0=(R-R0)/R0,其中ΔR是电阻的变化)随着温度从RT到100℃的变化。
从图(b)中可以清楚地看到,基于GO/PEDOT:PSS印刷的温度传感器在温度变化为75°C时表现出大约80%的电阻变化,每°C的灵敏度超过了1.09%。
计算出的电阻随温度的变化是线性的,其测定系数r2值为0.988,表明该传感器对温度变化具有线性。
对于任何温度传感器来说,研究响应和恢复时间是很重要的。从图(a)的第一部分可以清楚地看到,基于GO/PEDOT:PSS印刷的温度传感器显示了18秒的响应时间。
此外,为了研究恢复时间,在本研究中,基于GO/PEDOT:PSS印刷的温度传感器被小心地从热板上移开,在测量电阻的同时允许冷却。
在冷却过程中,用高精度的红外温度计(FLUKE 62 MAX)连续监测敏感层表面的温度。
从图(a)可以看出,传感器需要大约32秒才能完全恢复(从100℃到RT)。

从图(a)可以看出,样品的电阻随着温度的升高而降低,显示出电阻的负温度系数(NTC)。
在过去的报道中,基于PEDOT:PSS的聚合物复合材料也有类似的NTC特性。
图中显示了在NTC行为的传感器电气特性分析过程中的两个步骤示意图和各种过程的解释。

除此之外,对于现实世界和符合要求的应用,有必要研究传感器在各种静态和动态弯曲条件下的性能。
下图显示了基于GO/PEDOT;PSS印刷的温度传感器在各种静态弯曲(拉伸和压缩)条件下随时间和温度变化(从RT到100℃)的反应。
在RT,没有观察到器件(在平坦、拉伸和压缩条件下)的反应有明显变化。
然而,当温度逐渐增加到100℃时,与平坦的样品相比,当传感器受到静态弯曲条件时,在响应时间上观察到小于±5%的变化。
从图中可以清楚地看到,传感器的灵敏度变化可以忽略不计。

除了静态弯曲条件外,印刷的传感器还在RT下经受动态弯曲条件(多达1000次),以研究传感器响应的变化。
下图总结了该装置在超过1000次的拉伸和压缩弯曲条件下的性能。两个实验都是以每5秒一次的弯曲周期进行的。
在这两次测量中,样品的弯曲半径为~47.5毫米。图(a)和(b)分别显示了在拉伸和压缩弯曲的整个实验过程中电阻的相对变化。
图(c)和(d)显示了实验中一个任意点的三个周期,以证明每个周期的可重复性。

图(e)和(f)显示了在表征过程中样品在平面和弯曲条件下的照片。
所提出的温度传感器在弯曲条件下显示出稳定的性能。
从动态弯曲中,我们观察到弯曲条件下的平均变化为1%。
与电阻相对于温度的变化相比,这一微小的变化可以被认为是可以忽略的,并且可以对应于温度的差异(约2℃)。

为了证明所提出的温度传感器的应用,该装置被安装在3D打印的机器人手的拇指远端指骨上,并对其进行了加热安排测试。
读取电路包括一个分压器电路。该电路的电压输出被一个微控制器单元(MCU)捕获,作为模拟输入。
来自MCU的数据被发送到一台PC上,并使用LabVIEW程序进行显示。
用热风枪在拇指上吹热风,以测量传感器电阻的相对变化,并评估其作为电子皮肤组件的可行性。

然后用反馈机制测试了温度传感器,以防止接触高温物体。
手指是通过一个线性伺服电机驱动的,放在手掌区域,并使用相同的MCU进行控制。
该系统被配置为测量传感器的电压输出,同时向MCU发送命令,使手指与物体接触而启动。

在与物体接触约5秒钟后,分压器电路的输出达到了阈值0.05,在系统中被设定为安全温度,伺服电机立即被驱动,使手指离开物体。
选择阈值ΔR/R0=0.05的原因是由于传感层没有与热的物体接触,热量传递是通过接近完成的。
机器人手是用PLA材料制成的,它可以在70℃以上的温度下变形。

最后,印刷温度传感器的性能与一个商业热敏电阻(RS PRO热敏电阻DO-35 100kΩ)进行了比较。
为了进行比较,将印刷的温度传感器和热敏电阻放在RT的热板上。下图中标记为 "A "的是这些设备在RT时的相应归一化电阻。
热板的温度以~3-4℃/s的速度逐渐上升到100℃。正如前面所讨论的,印刷温度对温度变化高度敏感,在100℃时表现出约80%的电阻变化,响应时间为18秒。
相比之下,商业传感器在100°C时显示出约90%的电阻变化,但响应时间约为65秒。

为了评估传感器的恢复时间,将两个装置从热板上移开(在100℃),并保持在室温下冷却到RT。
图中,GO/PEDOT:PSS印刷品和商业传感器的恢复路径分别用B到C和D到E标记。GO/PEDOT:PSS传感器在32秒后完全恢复,而商业传感器需要大约120秒才能完全恢复。
因此,与商业热敏电阻相比,基于GO/PEDOT:PSS的印刷温度传感器显示了更快的反应。
表中给出了所提出的印刷的柔性温度传感器与文献中报道的其他作品的性能的进一步比较。

-<结论>-
综上所述,本文介绍了使用银浆和GO/PEDOT:PSS分别作为导电电极和敏感层的印刷柔性温度传感器。
印刷的柔性温度传感器表现出了负的温度电阻系数,在温度从RT到100°C变化时,电阻变化率为80%,灵敏度为1.09%。
本方法的优点包括方便的、具有成本效益的、可扩展的制造以及与电子皮肤应用的大面积柔性基材的兼容性。
印刷的传感器在不同的静态和动态弯曲条件下表现出稳定和可重复的设备性能。

该传感器还被集成在一个机器人手上,用于区分一个热的物体。
与商业热敏电阻相比,打印的柔性传感器显示了大约4倍的快速响应和恢复时间。
至于未来,我们的目标是将印刷的柔性温度传感器与压力/应变、湿度传感器以及相关的电子器件整合在一起,以便将eSkin的应用扩展到医疗保健领域。

