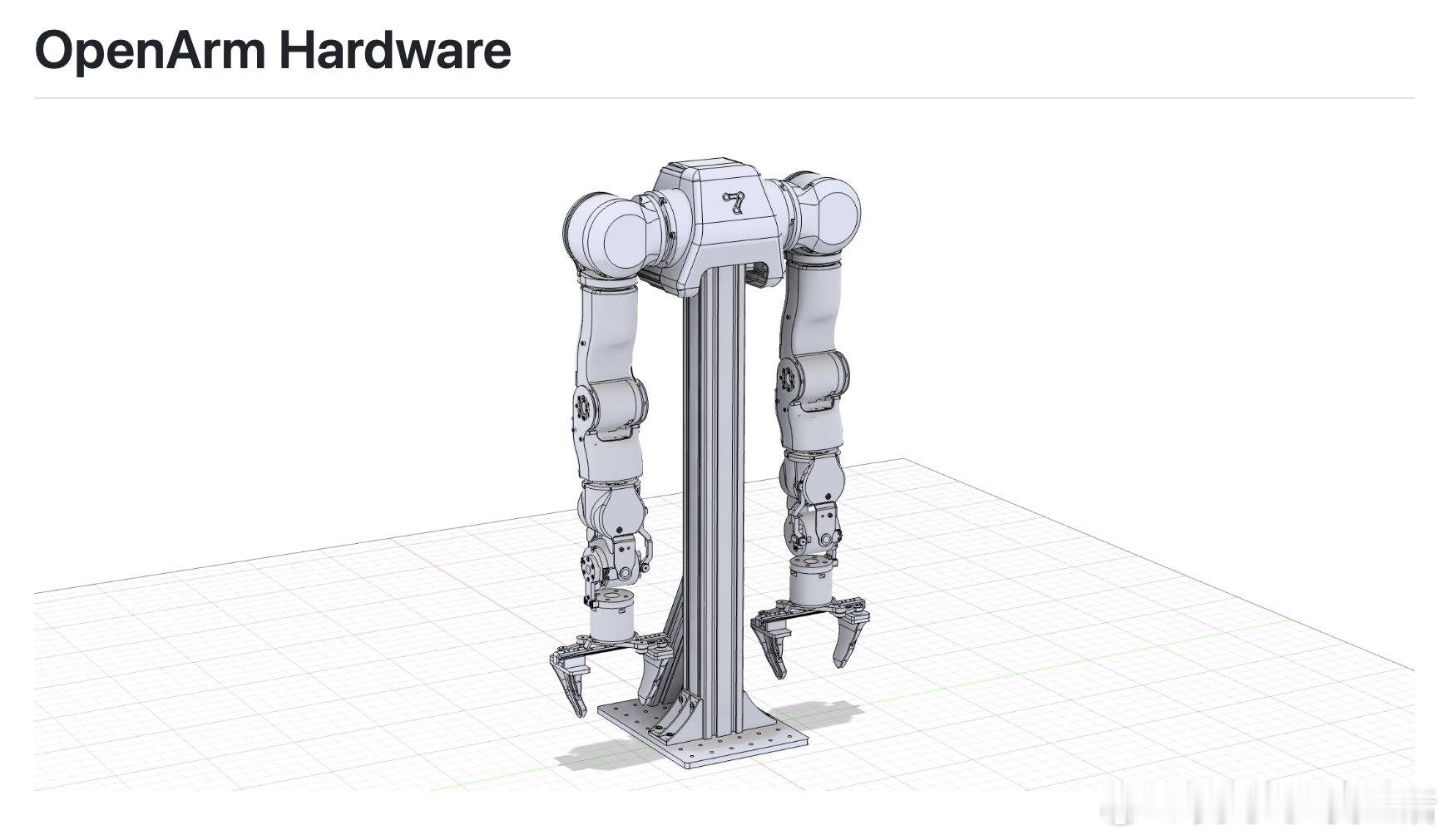
机器人硬件开发往往面临高昂的成本和封闭的技术生态,想要从零开始搭建一套稳定且可扩展的机械臂系统,通常需要耗费大量的研发精力。OpenArm Hardware 是一个开源的机器人硬件项目,旨在提供一套完整的机械臂 CAD 数据和制造信息,为机器人研发提供标准化的硬件基础。该项目不仅包含机械臂的全套组装模型,还提供了详细的制造指南、电路连接图以及物料清单,方便开发者进行定制、打印和复现。GitHub:github.com/enactic/openarm_hardware主要功能:- 提供 STEP 格式的完整组装文件,涵盖主控臂与从动臂设计;- 包含可直接用于 3D 打印的 STL 模型,方便快速制作原型;- 提供摄像头支架、PCB 轮毂外壳等各类功能性附件设计;- 详尽的接线图纸,指导电缆制造与复杂的电路连接工作;- 完整的技术规格说明、物料清单(BOM)及分步骤组装指南;- 采用 CERN-OHL-S-2.0 开源协议,鼓励社区提交改进与适配方案。项目支持多种 CAD 平台协作,并提供了完善的在线文档支持,适合机器人研究者、硬件工程师以及高级创客群体使用。