在很多人心中,登月是一个充满了神秘和挑战的任务。
想象一下,一个月球车,或者说是一个“机器人”,正在月球表面行走。
可是,当你得知它有六条腿时,你会不会觉得颇有趣?
为什么不是人们常见的四条腿或是轮子呢?
六条腿,这究竟有什么特别的?
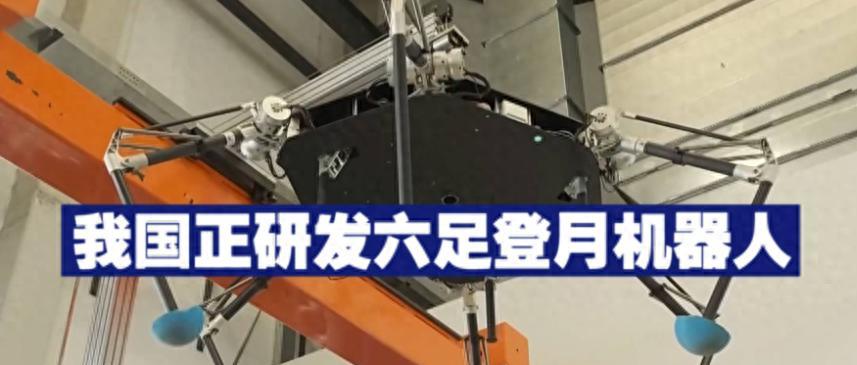
六条腿的登月机器人:为什么选择六脚设计?
其实,选择六条腿并不是心血来潮的决策,而是经过缜密计算和实验的结果。
我国的六足机器人与常规的四足相比,在稳定性和承载能力上有天然的优势。
六条腿意味着在行走时总有三条腿同时着地,形成一个稳定的三角形结构,这使得它在各种复杂地形上的行走更加稳健。

在上海交通大学,研究人员一直在研究六足机器人的应用。
实验室中的六足机器人已经可以作为导盲机器人使用。
这不仅需要六条腿的协调工作,还要有灵敏的环境探测和自主决策能力。
可见,六条腿的设计赋予了机器人无与伦比的稳定性,这对它们在月球这种不稳定的环境中行走至关重要。
六足机器人的优势与挑战
那么,六足机器人的优势到底在哪呢?
首先是稳定性,不管是负重还是在不平坦的路面上行走,六足机器人表现得尤为突出。
再者,六足的设计使得它的承载能力更强,不易倾倒。
上海交通大学的高峰教授曾解释,与机器狗相比,六足机器人的承载性和稳定性要优越得多。
虽然六足机器人有很多优点,但也面临不少挑战。

比如说,它的移动速度相对较慢。
对于一些任务,四足机器人可能会更高效。
此外,六足机器人的技术要求也很高。
我们需要解决腿部协调、机身结构牢固性等多个技术难题。
即便如此,这并不妨碍我国在这一领域的技术领先和不断创新。

你可能不知道,其实我国的六足机器人已经应用在非常严苛的环境中,比如南极。
在我国南极中山科考站,六足机器人已经扛下了零下40度的极寒挑战,能够在冰雪中负重工作长达6小时。
这证明了六足机器人的强大适应能力。
而这一次,六足机器人将随嫦娥七号登月,肩负起在月球上寻找水源的任务。

高峰教授表示,这种六足机器人不仅能负重行走,还能进行跳跃飞行,极大地扩展了它的活动范围。
飞跃探测器的任务与六足设计的独特性六足机器人的一个重要任务就是作为飞跃探测器,在月球南极复杂的地形中进行三次飞跃任务。
乍一听,飞跃探测器好像是一个新奇的设计,但其实它是根据月球表面的特殊环境量身打造的。
月球表面布满了大大小小的碎石块和陨石坑,传统的轮式探月器在这些地方很难自由行进。

飞跃探测器则可以依靠六足设计的稳定性和灵活性,跳跃跨越这些障碍。
这种独特的设计不仅能保护探测器免遭硬件损伤,还能让它覆盖更大的探索区域,寻找更多可能存在的水源。
未来的六足机器人:展望与思考嫦娥七号将带着六足机器人踏上月球的新征程。
这不仅仅是我国航天技术的一次突破,更是我们对未来科技的美好展望。

六足机器人在月球上的表现,将为未来人类的月球探测任务提供宝贵的数据和经验。
在你我的生活中,可能很少能接触到如此前沿的技术,但对科技进步的思考同样是有意义的。
六足机器人的成功,不只是冷冰冰的科研数据,更是科学家们智慧与努力的结晶。
未来,或许我们能够见证更多类似的科技创新,这些创新将一步步改变我们的世界。
从南极到月球,六足机器人走过了一段不平凡的路。

这条路上背负的,是人类对科技无限探索的梦想。
你是否也开始好奇,下一步,会有什么新奇的科技等着我们去发现?
在这个不断变化的世界,我们每个人都如同六足机器人一般,稳定而灵活,不断前行。
让我们一起期待,未来的科技将会带给我们怎样的惊喜和改变。
这不只是嫦娥七号的登月故事,更是我们每一个人都在参与的科技探索之旅。