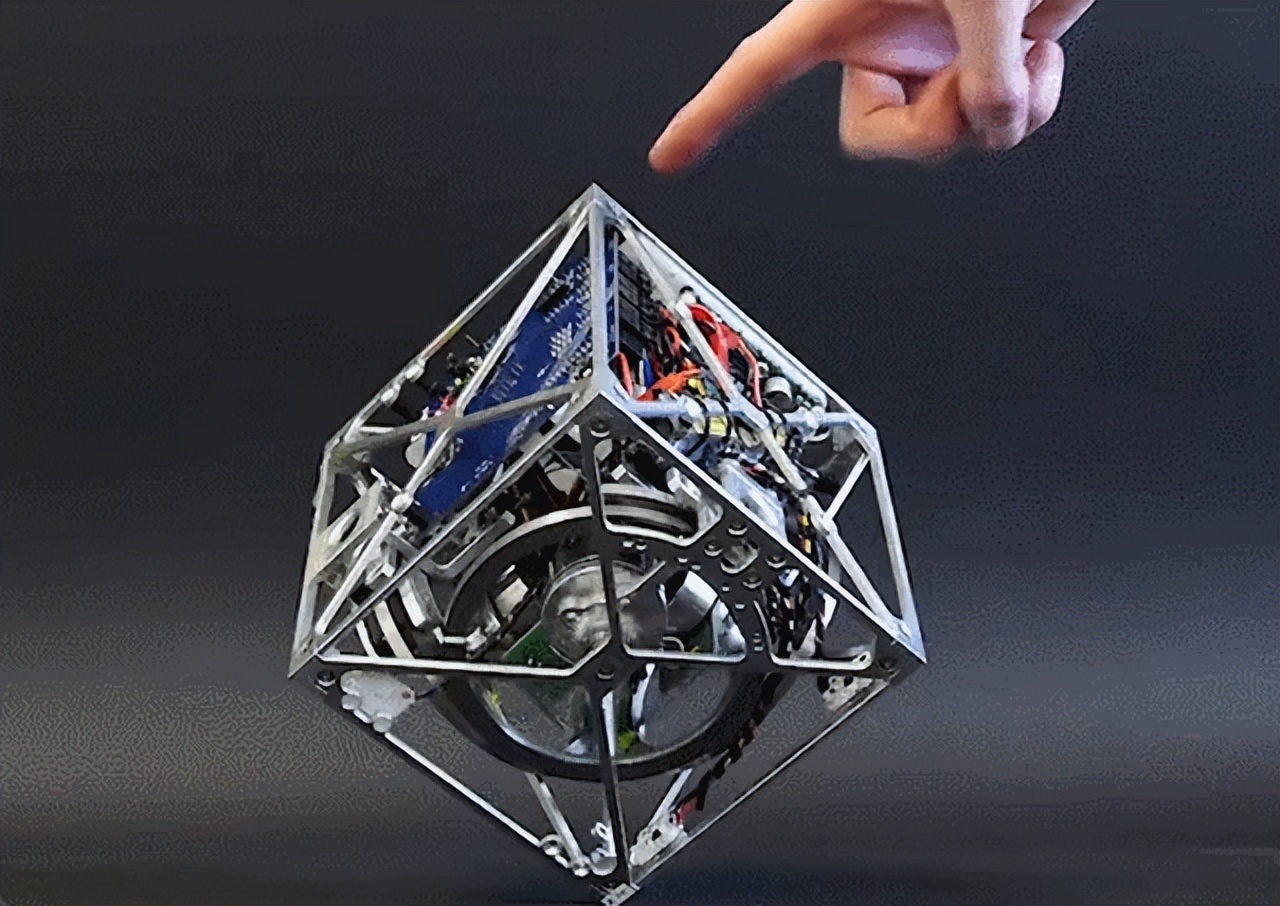
最近一台圆滚滚的警用球形机器人街上巡逻的视频火了!这个奇特的造型,让我瞬间想到当年坦克世界游戏,娱乐模式里出现过的苏联球形概念坦克IS-360,圆梦大师中国把他造出来了?据报道,中国这款球形机器人能跟踪、格斗、抓捕、水陆两栖、查打一体,并且已经投入到实际工作中帮助警察巡逻。
这个警用球形物体,不止把我惊呆了,很多国外媒体看到后也备受震惊。据悉,我国这个上街巡逻的球形机器人是鹿城公安和浙江大学控制科学与工程学院共同研发的 ,型号是RG-T。
这么一个球,怎么能做到格斗抓捕、查打一体?相比于被抢了饭碗的机器狗,球形机器人有哪些优势?成为警察好帮手的他身上又有哪些原理?


球形机器人是一种以球形为基本形态的机器人系统,它通常由球壳+球体组成,外壳可以封装例如电机、传感器、控制器和电源等各种内部组件,内部主要采取质心旋转机构。
要实现球形机器人的正常运转,首要做到的就是动态平衡,毕竟不能安静待在原地动不动就到处乱滚的一个球球显然无法成为警察的好伙伴。
人之所以能迅速恢复平衡,是因为人的耳朵里有一个前庭系统,它能够感知身体的倾斜和加速度,并迅速调动肌肉调整姿态,可这种能力对于机器来说就很难了。
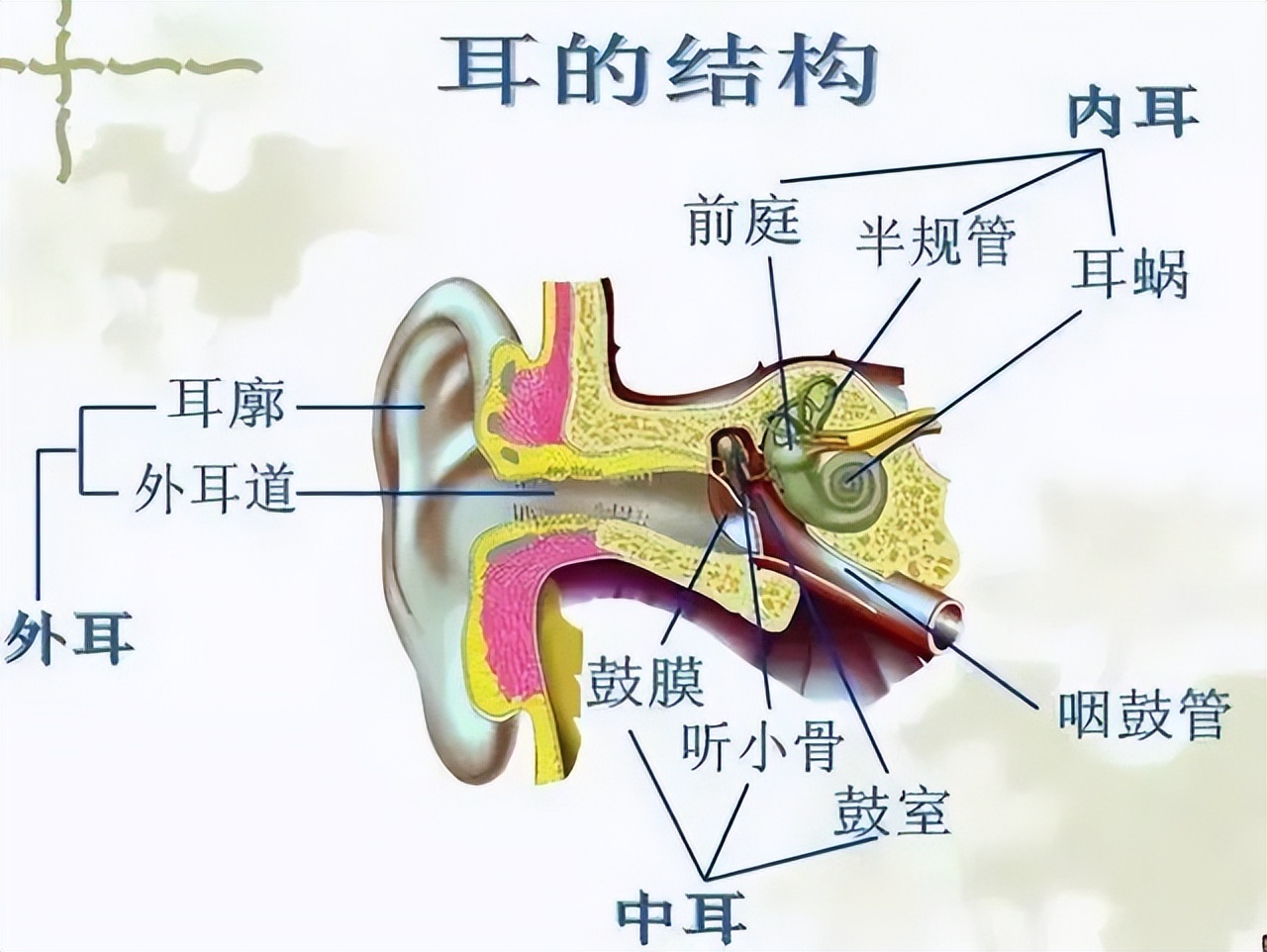
而球形机器人保持稳定的诀窍就在于它的“前庭系统”——陀螺仪传感器,熟悉武器装备的网友都知道,陀螺仪最早被用于航空航天领域,主要是用来帮助飞机、导弹等航空器感知姿态。
一个高速旋转的物体(比如陀螺)会倾向于保持其旋转轴的方向不变,这种特性被科学家用来设计能够感知物体姿态变化的陀螺仪。
在球形机器人内部,就安装着陀螺仪,它会不断监视机器人的姿态信息,当机器人受到外力或行驶到倾斜地面时,陀螺仪会感知到角度的变化,并迅速将这些数据传递给机器人内部的控制系统。
要实现动态平衡,那就必须先得把“倒立摆”理论讲清楚,举个例子来说吧,一个长杆立在滚动的小车上,当小车移动时,杆子会倾斜。为了保持杆子不倒,小车需要不断调整自己的位置,保持重心稳定。
球形机器人内部的动态平衡系统,就是用算法模拟了这种行为,它主要是通过快速调整滚动方向和加速度来让自己保持平衡。

举个简单例子:当机器人向前倾斜时,控制系统会指挥后部的驱动模块加速滚动,把重心往后拉;如果向左侧倾斜,系统会让右侧的模块发力,重新平衡。
通常,动态平衡系统的工作大体可以分为三个步骤,首先是陀螺仪提供实时的倾斜和加速度数据,然后控制系统使用PID控制之类的复杂数学算法,计算出需要调整的方向和力度,最后驱动装置根据指令快速补偿运动,把机器人拉回重心。
由于动态平衡系统的反应速度极快,从感知到执行只需几毫秒,因此即使机器人受到突然冲击,也能稳如泰山。
光是站稳还不够,球形机器人最大的亮点在于它可以自由滚动,随时改变方向,甚至原地转圈,这就要归功于它独特的球轮驱动系统了。
球形机器人的外壳是一个高强度的球体,内部则是一套复杂的驱动模块,这套模块通常由多个电动滚轮组成,每个滚轮都能独立控制方向和速度。
球形机器人内部通常包含3-4个独立电机,这些电机连接到特定的驱动滚轮上,通过调整滚轮的转速和转向,机器人就可以灵活精准地走位了。
比如说,所有滚轮同步加速或减速,就会让机器人前进或后退;左右滚轮差速运动,机器人就可以转弯;相对方向的滚轮同时反向旋转时,机器人就能原地旋转。
正是球形机器人的“耳朵”(陀螺仪)、“大脑”(动态平衡控制系统)和“脚”(球轮驱动系统)完美协作,共同赋予了它“不倒金身”和“灵活身手”。

相较于传统轮式、履带式、人形机器人以及机器狗,球形机器人所采用的球轮驱动系统,依靠内部多个电动滚轮可独立控制方向和速度,使机器人能够通过改变滚轮的转速和转向,实现前进、后退、转弯、原地旋转等各种动作,具备高度的机动性和灵活性,轮子本身就是形体的最大部分,可在复杂地形和相对狭窄空间中自如穿梭。
滚动起来消耗的电量远远小于其他类型的机器人,在长时间的巡逻任务中,不需要频繁地充电,就能持续工作,大大提高了巡逻的效率和范围。
无论是高低不平的山路、堆满杂物的小道,还是火灾现场、地震后的废墟等困难场景,机器人都能顺利通行,可代替人类进入危险区域,执行救援和检测任务,减少人员伤亡的风险。

RG-T这款机器人,最快速度可达 35km/h,能够快速地追击目标或到达指定地点,在警用抓捕等场景中具有很大的优势。
由于内部安装有陀螺仪传感器,能够实时感知机器人的姿态信息,并将数据传递给动态平衡控制系统。控制系统通过快速调整滚动方向和加速度,让机器人在受到外力或行驶在倾斜地面时,也能迅速重新调整重心,保持平衡稳定,即使受到意外撞击,也能在 0.1 秒内恢复平衡。
并且凭借球形的浮力和特殊的推进装置,机器人能够在水中灵活游动,适应多种复杂环境,可执行水域救援、检测等任务。
AI技术也为球形机器人提供了助力。L4 级自动驾驶:使用自适应控制算法系统,具备 L4 级别的全自动驾驶能力,无需地图或导航,可根据环境情况自行调节运动轨迹和方式,自动避障,能够更好地适应复杂多变的现场环境。
全景感知系统:两侧的多个摄像头形成人形视觉仿生的 “昆虫复眼” 全景感知系统,为机器人提供更广阔的视野和更准确的环境信息,进一步提升其感知与决策能力。
球形结构同样具备出色的防护与适应能力,球形的外壳采用坚固耐用的材质制成,能够承受高达 4 吨的冲击力,在高空坠楼、执行任务撞击等危险情况下,依然能够保持完好,正常执行任务。


再来说说球形机器人的广泛用途,首先是跟踪功能。
RG-T配备多种传感器,如高清摄像头、红外传感器、激光雷达等。摄像头可实时捕捉周围环境的图像信息,红外传感器能检测到物体的热辐射,激光雷达则可精确测量距离和物体的轮廓。通过这些传感器的数据融合,机器人能够快速识别和定位目标,并在复杂环境中对目标进行持续跟踪。
同时可以利用深度学习和计算机视觉技术,对传感器获取的图像和数据进行实时处理和分析。机器人可以学习和识别不同的人物特征、行为模式等,从而准确地分辨出需要跟踪的目标,并预测其运动轨迹,实现自主跟踪。
采用高精度的定位系统结合地图数据和环境感知信息,确定自身的位置和姿态。同时,通过路径规划算法,能够根据目标的位置和运动方向,自动规划出最佳的跟踪路径,确保在跟踪过程中保持与目标的合适距离,并避免障碍物。

有了跟踪再加上抓捕就是查打一体,格斗与抓捕功能上,可能有两种途径,其一是配备抓捕工具:可根据实战需求在左右两边加挂警用器械,如网捕枪、催泪喷射器、烟雾弹等。网捕枪能够发射出带有粘性或束缚性的网,迅速将目标捕获;催泪喷射器和烟雾弹则可以在必要时释放,对目标进行干扰和控制,为抓捕创造有利条件。
其二就有意思了,简单说就是野蛮冲撞。凭借着强大的动力与机械结构,高性能的电机和动力系统,能够提供足够的扭矩和力量,使其在格斗中具备一定的冲击力。同时,坚固的球壳和内部机械结构设计,使其能够承受一定程度的外力冲击,不易损坏,保证在与目标接触时自身的稳定性和安全性。
另外其独特的球形设计和球轮驱动系统,使机器人能够快速地改变运动方向和速度,具备出色的机动性和灵活性。在格斗和抓捕过程中,可以迅速地接近目标,并灵活地躲避对方的攻击或障碍物。
值得一提的是水陆两栖功能。机器人的球壳采用密封设计,能够有效防止水的侵入,保证内部电子元件的正常工作。

其球形结构本身具有较好的浮力特性,使其在水中能够自然地漂浮。此外,还可能配备了专门的浮力调节装置,根据不同的水域环境和任务需求,调整机器人的浮力大小,确保其在水中的稳定性和可控性。
只是能浮起来还不够,在水中,机器人依靠特殊的推进装置来实现移动。安装在球体表面或内部的螺旋桨、喷水推进器等,通过控制推进器的转速和方向,实现机器人在水中的前进、后退、转向等动作,使其能够在水域环境中灵活地巡逻和执行任务。
为了适应水陆两栖的工作环境,机器人的外壳和关键部件通常采用防水、耐腐蚀的材料制造,以延长其使用寿命,确保在长期的水陆交替使用过程中性能不受影响。

从实验室走向街头,这个呆萌又彪悍的RG-T,体现的正是我国在智能技术领域的创新实力,其实最期待的还是,在某个不为人知的角落里,有咱们的解放军战士操作这个黑科技的“小胖子”!
