1、工业机器人、人形机器人、服务机器人对比

2、人形机器人投资环节

人形机器人轮式VS双足式对比

3、AI巨头入局,人形机器人即将迎来“ChatGPT”时刻
随着AI技术的迭代和应用研究深入,在各种任务解决上已经体现较好的通用性能力,智能体端到端的AI+控制算法、强化学习、具身模型技术方案应用在各种任务的算法方案逐渐取得重大突破,围绕Transformer的底层算法框架已经形成,研发商需要探索不同于历史卷积模型的AI架构,开启全新的范式。

汽车工厂为最先落地的应用场景
人形机器人将率先落地于汽车工厂:国内外主流人形机器人厂商的落地场景均为汽车工业,特斯拉的人形机器人将首先放在特斯拉汽车工厂应用,优必选Walker S已经进入蔚来汽车工厂,英伟达投资的Figure AI今年也会将产品放进宝马工厂进行实训。



机器人迭代速度加快

1)24年10月10日,Optimus Gen2在特斯拉“We,robot”活动现场的人群中走路、打招呼、展示舞蹈,并执行出倒水、拿礼物、猜拳等多组动作,人形机器人动作丝滑连贯。
2)24年11月28日,特斯拉X推特号发布Optimus稳稳接住网球视频,标志着灵巧手硬件趋于成熟
3)25年1月8日,特斯拉X推特号发布Optimus Gen3有望于未来几周发布。次日马斯克在采访中表示,如果一切进展顺利2026年特斯拉产量将增加10倍,至5-10万台人形机器人,然后在第二年再增加10倍至50-100万台。

特斯拉Optimus进展——执行器Tier1 供应情况
三花和拓普作为Tier1,是人形机器人板块中最具确性的标的:
特斯拉Optimus全身分别拥有14个旋转+直线执行器,分别分布在手臂和腿部,价值量占比较高。
而三花智控和拓普集团作为核心Tier1,是最具确定性的标的。

特斯拉Optimus成本拆分预测

减速器:人形机器人旋转执行器核心部件
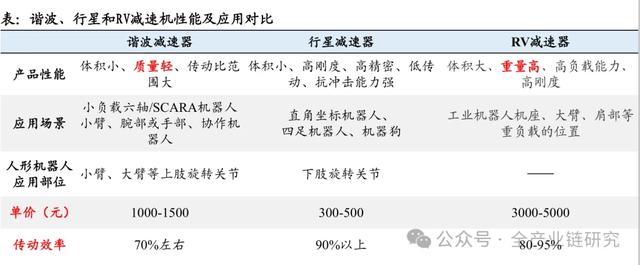
减速器是旋转执行器的核心部件,分为谐波、行星和RV:
减速器是连接动力源和执行机构的中间机构,具有匹配转速和传递转矩的作用。按照结构与传动原理不同可将减速器分为谐波减速器、RV减速器及行星减速器。
1)谐波减速器:特点包括负载小、精度高、结构紧凑,在工业机器人领域用于小负载六轴、小负载SCARA及协作机器人;
2)RV减速器:特点包括体积大、重量高、高负载能力、高刚度,主要用于重负载机器人;
3)行星减速器:特点包括体积小、高刚度、抗冲击能力强等特点,广泛用于航空航天、机器人、汽车、纺织等国民工业。
机器狗自由度低,对体积和重量要求低,因此大量采用行星减速机



谐波在人形机器人应用中的难点:
1)棘轮现象:当施加过大的扭矩时,可能导致钢轮和柔轮齿无法正确啮合,导致棘轮现象。这种现象会导致过度振动、加速磨损,甚至可能损坏驱动器的其他部件。
2)共振现象:谐波驱动器中的主要振动源来自于柔轮的连续变形。这种变形可能因安装误差和制造缺陷等因素而加剧。人形机器人双手需同时运动,若产生共振现象,会导致两手抖动。
3)减重任务:尽管相较于行星和RV减速机,谐波的重量已经非常轻,但对于人形机器人来讲,仍然负担沉重,未来如何减重(潜在方案主要系更换轻量化材料)成为重要课题。
4)量产难点:谐波柔轮和钢轮装配过程中无法实现完全自动化,此外钢轮和柔轮的选型若要做到完美也需要经验丰富的老师傅。

人形机器人用谐波减速器市场空间测算

谐波减速器核心标的整理

灵巧手:人形机器人最具价值&潜在变化最大环节
从传动方式来看,灵巧手主要可分为腱绳传动、连杆传动和齿轮传动

特斯拉Optimus第一代灵巧手拆分(空心杯方案)

特斯拉Optimus第二代灵巧手拆分(腱绳方案)

丝杠导轨为核心传动部件,影响设备精度和稳定性
滚珠丝杠是将旋转运动转换成线性运动的理想传动装置,主要由丝杠轴、螺母、滚珠以及循环部件组成。丝杠轴、螺母和端盖上都制有圆弧形螺旋槽,将它们套装在一起时,这些槽对合起来就形成了螺旋通道,滚珠能够在通道内循环滚动。当丝杠相对于螺母旋转时,滚珠在滚道内自转,同时又在封闭的滚道内循环运动,使丝杠和螺母相对产生轴向运动。


行星滚柱丝杠在承载力等方面优于滚珠丝杠
行星滚柱丝杠主要是由滚柱丝杠、滚柱螺母、滚柱、内齿圈、压盖及挡圈组成。
滚柱丝杠与滚柱螺母为齿形角90°的多头螺纹,滚柱为齿形双凸圆弧的单头螺纹,若干滚柱围绕丝杠均匀分布。当滚柱丝杠旋转时,滚柱既围绕丝杠轴作公转,又围绕自身轴线作自转,带动滚柱螺母作轴向移动。行星滚柱丝杠结构与滚珠丝杠类似,只是传力元件为螺旋滚柱,属于典型的线接触;而滚珠丝杠的传力元件为滚珠,属于点接触。

行星滚柱丝杠在承载力等方面优于滚珠丝杠

行星滚柱丝杠在承载力等方面优于滚珠丝杠
行星滚柱丝杠相比于滚珠丝杠在承载力、运动平稳性、转速及加速度等方面更具优势:
1)高转速和高平稳性:滚柱在丝杠中滚动时无返向机构,不产生震动,运行平稳,转速可达6000r/min,加速度可达7000rad/s2。
2)高承载和高刚度:相同丝杠直径下行星滚柱丝杠承载能力提高6倍,相同负载下节省1/3空间,寿命提高14倍,工作环境温度提高2倍,且采用行星机构控制滚柱运动高速运转时噪声较小。但是由于螺纹分度误差及牙型强度等原因,行星滚柱丝杠的实际承载小于理论承载,且传动效率和精度方面也与滚珠丝杠存在一定差距,在润滑良好的情况下行星滚柱丝杠传动效率可接近90%。
特斯拉Optimus线性关节采用电机+行星滚柱丝杠方案。根据特斯拉AI Day发布会披露,特斯拉Opitimus人形机器人共有28个运动关节,包括旋转执行器和线性执行器,其中旋转关节的方案和传统仿人形机器人基本一致,采用电机+谐波减速机的形式;而线性执行器的分布却与以Asimo为代表的传统电伺服机器人差异较大,采用力矩电机+行星滚柱丝杠方案,其中行星滚柱丝杠成本占比可达56%。

行星滚柱丝杠可分为五大类别

丝杠市场空间测算&核心标的推荐


海外人形机器人主要企业进展

国内外产业链共振,华为入局加速产业布局


HW在机器人领域早有布局:特种机器人方面,23年华为与中国煤科、海康威视以及科大讯飞联合推出“领航者3巡检机器人”,华为方面主要提供昇腾AI算力。人形机器人方面,22年4月华为首次涉足人形机器人领域,与达闼机器人签署合作协议,联合开展机器人应用领域技术攻关;23 年 6 月华为投资 8.7 亿成立东莞极目机器人公司,专注于研发 AI 技术应用和智能制造等领域的解决方案。24年3月,搭载盘古大模型的乐聚机器人亮相华为HDC大会。24年5月华为与四川省签署战略合作协议,10月开始筹备华为(西南)数字机器人创新中心、华为(四川)人工智能与智改数转创新推广中心、华为(成都)数字服务创新中心。
华为签约合作备忘录的重点公司梳理









