近日,华中科技大学丁汉院士和吴志刚教授团队,基于机器学习和有限元分析,提出一种超材料逆向设计方法,测试集平均准确率达 98.92%。

图 | 吴志刚(来源:吴志刚)
通过精确地调控结构的应力应变曲线,该方法可以解决超材料设计中参数复杂、几何变形非线性、以及材料本构非线性等问题带来的挑战。
并能取得与实验和仿真结果相匹配的高准确度结果,有助于引领超材料设计领域的发展,以及助力机械智能系统的发展。
对于柔性力学超材料来说,它往往拥有轻量化、高强度、生物相容性、快速响应性、良好的减震性、以及较高的环境顺应性。
故可被用于抗震建筑、轻量化结构、生物医学植入物、具身智能机器人等领域。
在抗震建筑领域,柔性力学超材料能够发挥良好的减震性能,从而能够增强建筑物的抗震性能。
在轻量化结构领域,柔性力学超材料能被用于制造轻量化、高强度的航空航天器结构,从而能够提升飞行器的性能和燃料效率。
在生物医学植入物领域,柔性力学超材料能被用于制造耐久性更好、生物相容性更高的植入物,比如用于制造人工关节和骨修复材料等。
在具身智能机器人领域,柔性力学超材料能被用于制造灵敏度更高、环境适应性更强的机器人,从而能够更好地适应复杂环境、更好地执行精细任务。

根据应用对象,实现按需逆向设计
当前,不少科研人员都在尝试将研究内容与 AI 结合。然而,对于柔性力学超材料结构设计这一领域来说,它与 AI 相结合的起步较晚。领域内的大部分学者也倾向于在现有体系之下进行创新。
据介绍,传统结构设计方法是一种正向设计方法,即是一种从结构到性能的方法,要想实现具有特定力学性能的结构,通常需要不断地试错。
而逆向设计方法,则是一种从性能到结构的方法,它可以优化结构设计的迭代流程、缩短设计周期,从而加快产品开发速度。
然而,在逆向设计中,结构力学性能与其结构参数之间的数学关系更为复杂。因此,该团队决定将 AI 和结构设计结合,以期实现柔性力学超材料的逆向设计。
凭借逆向设计的高效、低成本特点,配合柔性力学超材料行为可编程特性,将有助于更快、更好地实现机械智能。

(来源:Advanced Materials)
此外,AI 也能帮助突破柔性力学超材料设计中的已有难题:
首先,对于拓扑优化、等几何优化、有限元分析等传统结构设计方法来说,它们都是从数学逻辑出发,不仅计算成本较高,泛用性也有待增强。而 AI 则能降低逆向设计的成本、以及提高泛用性。
其次,在柔性力学超材料的设计中,通常会涉及到大量的结构参数。而 AI 可以帮助人们从复杂数据中提取新特征,从而发现某些依靠人力难以发现的数学规律,进而提高设计效率。
再次,在现有的柔性力学超材料设计方法中,人们很少考虑非理想的结构构型、非线性的大变形、以及非线性的材料本构模型等因素。
通过 AI 方法解决这些非理想因素引入带来的复杂性,将有助于提高设计的精确度、以及提高设计方法的有效性。
对于传统的真人机械结构设计师来说,他们往往是“越老越吃香”。即设计的结构越多,经验也就越丰富。
但这也反映了结构设计领域非常依赖设计经验的问题。而对于善于分析大量数据的 AI 来说,这其实是一个能够施展拳脚的舞台。
即通过大量地学习数据和经验,AI 能够总结高度非线性数学关系中的规律,来帮助人类实现快速的设计。
因此,当把基于数学逻辑的传统方法,与基于数据驱动的 AI 技术兼收并蓄,就能让不同设计方法互为补充,突破柔性力学结构设计中的难题,实现高效率、高准确性的柔性力学超材料的设计。
但是,如前所述,柔性力学超材料本身存在构型不够理想、非线性大变形、以及非线性本构模型等问题。
而通过有限元分析高精度模拟非理想、非线性的约束,结合机器学习拟合高度非线性的数学关系,让该团队得以在本次研究之中,根据应用对象实现按需的逆向设计。

先从搞定复杂材料做起
具体来说,课题组将计算机仿真技术与机器学习算法加以结合,利用基于数学逻辑的仿真生成的数据,来训练机器学习模型,借此定下了逆向设计的思路。
生成精确仿真数据的第一步,便是精确刻画材料的本构模型。
事实上,对于任何一种材料来说,它在变形时的行为,都是弹性行为、粘性行为和塑性行为的组合。
而在针对不同材料进行尝试之后,该团队决定使用热塑性聚氨酯来作为基础材料。
原因在于:其拥有较好的弹性和塑性。在受到不同速率施加的外力作用时,还能表现出不同的变形粘性,并且变形时的力学行为更为复杂。
既然热塑性聚氨酯材料这么“复杂”,那么假如能够针对它的结构实现精确设计,那么对于其他具有相似复杂度、或者复杂度更低的材料结构来说,必然能够带来一定参考。

(来源:Advanced Materials)
而为了确保仿真结果能够准确地反映现实中的实验结果,他们不断地调整实验假设与仿真设置。
在此基础上,他们利用 Python 脚本,开展了大规模的计算处理和数据处理,生成并分析了大量仿真数据。
完成数据的收集和处理之后,课题组开始构建逆向网络和正向网络,以便实现柔性力学超材料的逆向设计。

(来源:Advanced Materials)
对于逆向网络来说,它可以学习从目标性能到材料结构的映射关系,从而能够根据给定的目标性能参数,直接生成相应的材料结构。
对于正向网络来说,它可以学习从材料结构到材料性能的映射关系。
这时,针对逆向网络所生成的设计方案,正向网络就能检验这一方案能否满足预期性能,并针对设计结果进行验证和优化,从而确保设计方案的可行性和可靠性。
这样一来,逆向网络与正向网络的结合,就能快速地生成新型材料设计方案,从而满足特定的性能要求。
(来源:Advanced Materials)
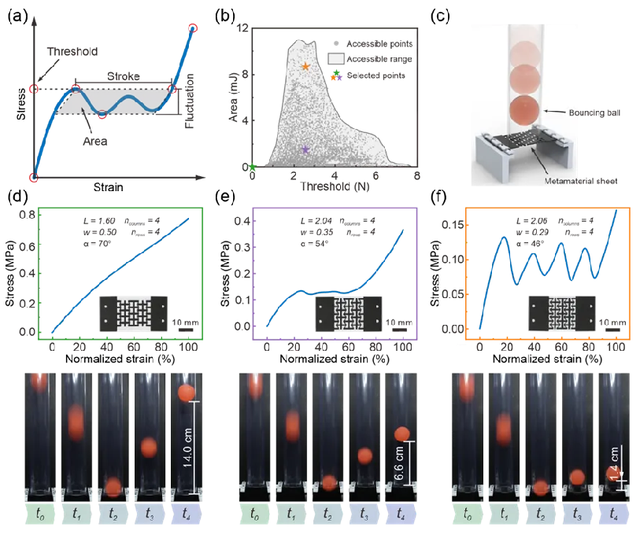
日前,相关论文《基于数据驱动的逆向设计调控柔性力学超材料的应力应变曲线以按需实现其不同力学响应》(Tailoring Stress-strain Curves of Flexible Snapping Mechanical Metamaterial for On-demand Mechanical Responses via Data-driven Inverse Design)以为题发在 Advanced Materials(IF 27.4)。
华中科技大学博士生柴治平和宗子盛是第一作者,吴志刚担任通讯作者 [1]。

图 | 相关论文(来源:Advanced Materials)

让真人材料工程师和 AI 并肩协作
总的来说,本次课题是该团队基于仿真数据和机器学习方法,所实现的第一个柔性结构逆向设计工作。
但它仍旧存在一定的不完美之处:比如结构构型和变形行为还比较单一。
因此,后续他们将继续围绕可变形柔性结构的逆向设计开展研究。
以人体关节为例,尽管我们无法精确地到控制每一个关节的动作,但当主动型关节动作和被动型关节动作加以结合,则能产生惊人的效果。
而这正是人类能够灵活跑跳和操作工具的原因所在。事实上,这也正是机械智能的魅力所在。
因此,该团队希望通过设计具有各种动作行为的柔性结构,并将它们组合起来,从而形成完整的运动机构,进而能像人体关节一样灵活运作。
而为了拓宽设计空间、以及实现动作行为多样化的柔性结构设计,他们还将进一步探索压缩行为、切变行为、弯曲行为和扭转行为。
希望能够完善柔性结构的逆向设计体系,为传统机械结构设计领域提供全新的思路,最终实现具有机械智能的柔性结构的设计。
此外,本次工作所采用的生成式 AI 模型,是一款较为初级的模型,对于算力的要求并不算高。
而对于编码解码器和扩散模型等复杂生成式 AI 模型来说,它们已经经过了一定考验。
尽管它们的算力要求更高,但是所生成的设计方案也更丰富、更可靠。因此,该团队也正在考虑使用更先进的生成式 AI 模型。
最终,课题组希望能将 AI 的数据分析能力和逻辑推理能力加以结合,从而能够针对设计需求进行深度理解,让真人材料工程师可以和 AI 并肩协作,创造出具有卓越性能的机械结构。
除了研究柔性结构设计之外,课题组也在探索 AI 智能植物系统、基于 AI 的触觉感知系统、基于 AI 的适应性抓取方法、以及基于 AI 的柔性机器人动作规划等方向 [2]。
总体而言,从柔性机器人的结构、到传感、再到控制方法,该团队希望能够充分地结合 AI 技术,开发出一系列相辅相成的具身智能技术。
参考资料:
1.Chai Z, Zong Z, Yong H, et al. Tailoring Stress‐strain Curves of Flexible Snapping Mechanical Metamaterial for On‐demand Mechanical Responses via Data‐driven Inverse Design. Advanced Materials, 2024: 2404369.https://doi.org/10.1002/adma.202404369
2.http://www.softintel.top/journal.html