仅供医学专业人士阅读参考
点击右上方“关注”,准时接收每日精彩内容推送。
蝠鲼利用类似翅膀的胸鳍进行有趣的振荡式游泳,这为设计潜在快速、高效和可操控的软体游泳机器人提供了丰富的灵感,然而这一目标尚未实现。将快速速度、高效率和高机动性结合到一个单一的软体游泳机器人身上,同时使用简单的驱动和控制,仍然是一个重大挑战。
来自美国北卡罗莱纳州立大学罗利分校的Jie Yin团队报告了通过在类似蝠鲼的软体游泳机器人的单稳态拍动翼上利用自发断裂动作来应对这一挑战。单稳态翼通过气动方式瞬间向下拍动,并在放气后,由于弹性恢复力的作用,它会自发地弹回到初始状态向上拍动,无需消耗额外能量,这大大简化了设计、驱动和控制。本文通过简单地调整单一输入驱动频率,实现了6.8倍体长每秒的创纪录高速、高能效以及在水下非结构化环境中导航的高机动性和碰撞韧性。相关工作以题为“Spontaneous snapping-induced jet flows for fast, maneuverable surface and underwater soft flapping swimmer”的文章发表在2024年12月04日的期刊《Science Advances》。

【设计单稳态拍动翼软体游泳机器人以实现高速度和高机动性】
图1A展示了单稳态拍动翼软体游泳机器人的设计与制作。它沿用了本研究团队之前设计的双稳态拍动翼软体游泳机器人的设计。将两条平行的聚酯带的末端粘合在一起,自发形成一对双稳态预弯曲框架翅膀(图1A,i和ii)。不同的是,本文使用热处理部分释放框架翅膀中预先储存的弹性应变能,从而使双稳态翅膀变为单稳态(图1A,ii和iii)。因此,为了驱动单稳态翅膀的拍动,我们只需要一个软气动弯曲执行器作为其软体,顶部嵌入一层空气通道,如图1A, i所示。
图1B和C显示了双稳态和单稳态拍动翼软体游泳机器人在驱动行为上的明显区别。对于双稳态和单稳态翅膀在热处理前后,初始的凹形配置代表一种稳定状态。充气使空气通道膨胀,向下弯曲软体,驱动翅膀翻转并向下划水。对于双稳态情况,翅膀在放气后甚至负压下保持凸形配置(图1B)。除非在其底部增加另一层空气通道,如本研究团队之前开发的双稳态拍动翼游泳机器人,否则无法驱动其恢复到原始配置。相比之下,对于单稳态情况,一旦放气,它将自发地弹回并向上划水,恢复到其唯一的稳定状态,由弹性恢复力驱动(图1C)。这是因为凸形配置在双稳态翅膀中对应第二种稳定状态,但在单稳态翅膀中是不稳定状态。

图1 利用单稳态提高软体拍翼游泳机器人速度和多模态表面及水下机动性的设计
【热处理下双稳态向单稳态转变的相图】
图2A展示了在不同翼展长度S的扑翼软体机器人中,经过55℃温度下一定时间的热处理T后,从双稳态到单稳态翅膀转变的相图。该相图基于不同S和T条件下制造的双稳态翅膀的力-位移(F-d)曲线绘制而成(图2B、C)。相图显示,对于任何给定的S,随着T的增加,由于预应力的释放,初始的双稳态翅膀将逐渐转变为单稳态翅膀,而其预弯曲的翅膀形状在转变前后几乎没有变化(如图2B所示)。对于S较小的翅膀,其储存的弹性能量更高,因此需要更长的时间T来释放能量并转变为单稳态。
图2C和D分别展示了初始为双稳态翅膀(S = 160毫米)在不同T下的测量F-d曲线及其对应的能量地形U-d曲线的变化情况。对于T = 0分钟时,随着位移增加,F-d曲线显示出负斜率和负力(图2C),U-d曲线有两个局部能量最小值(图2D),验证了其双稳态特性。当T增加到约20分钟时,双稳态的F-d曲线过渡到一个临界状态,曲线几乎与水平零力线相交(图2C),表明从双稳态到单稳态的过渡。这对应于相图中的过渡区域(图2A)。相应的U-d曲线在d = 0处仅显示一个局部最小值,即原始的唯一稳定状态(图2D)。随着T进一步增加,F-d曲线远高于零力线(图2C),并且从实验和解析建模的U-d曲线均只显示一个局部最小能量值(图2D),验证了其保持的单稳态特性。
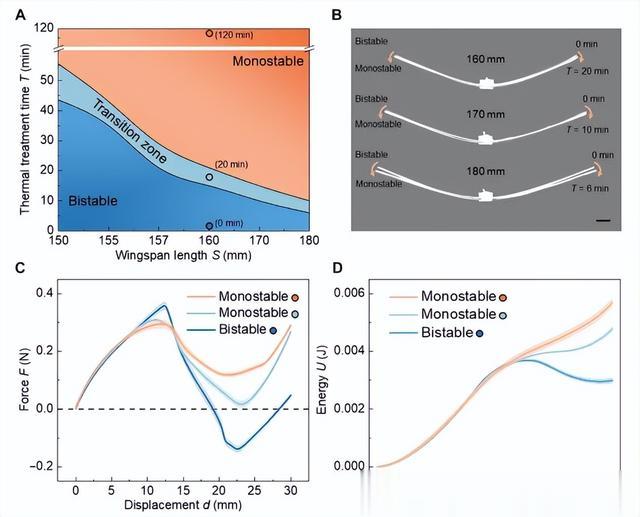
图2 热处理诱导的翅膀从双稳态到单稳态的转变
【高速且高能效的单稳态拍动翼游泳机器人】
图3A和4A展示了单稳态拍动翼机器人在水面附近自由游动(侧视图)和静止游动(等轴视图)时的一个拍动周期内的姿态变化(翅膀向下拍动和向上恢复),分别对应于翅膀向下拍动和向上恢复的一个驱动周期。驱动频率为f = 1.25 Hz,驱动压力为P = 61 kPa。翅膀尖端的运动(例如,水平和垂直方向上的位移、速度和加速度)和轨迹分别如图3B和4B所示。充气时,身体向下弯曲,逐渐驱动翅膀逆时针旋转并向下拍动,接着在21毫秒的短时间内通过快速翻转加速向下拍动,以向前推进(图3A和B以及图4A到C)。然后,放气时,它迅速且自发地弹回到原始配置,通过向上划动进一步推进。回弹过程在36毫秒内完成。追踪到的翅膀尖端和软体的轨迹显示出高度的重复性和一致性。翅膀尖端的轨迹显示出高度不对称的三维8字形(图4B),而其软体显示出二维弯曲运动(图4C),这表明两个快速翻转和回弹运动的强烈变形和运动不对称性。这与在其双稳态对应物中观察到的对称8字形轨迹形成鲜明对比。因此,尖端运动显示出非对称的方波形运动,而不是在其双稳态对应物和其他蝠鲼启发式推进器及游泳机器人中观察到的正弦运动,如后文所述,这增强了推力。在游动过程中,迎角因软体的波动而变化,并显示出正弦模式(图3C)。
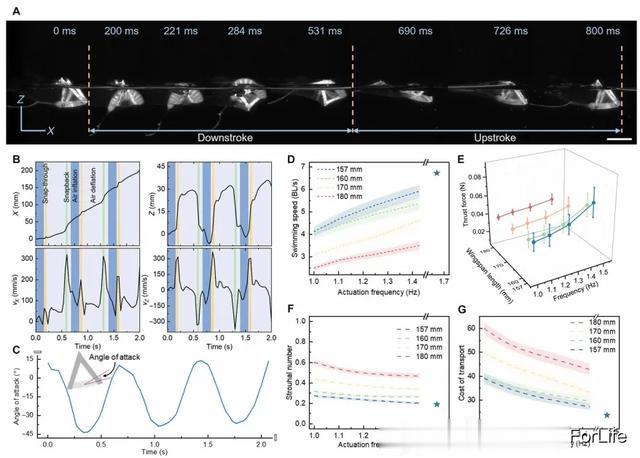
图3 单稳态软体拍翼游泳机器人的游泳性能

图4 在空气-水界面处,静止单稳态软体拍翼游泳机器人(S = 160 mm,f = 1.25 Hz)的拍打和旋转运动,后身体端固定
【单稳态诱导的流体动力学,实现高速和高效】
为了深入了解观察到的高速高效单稳态游泳机器人的底层机制,本文结合了粒子图像测速(PIV)测量和计算流体动力学(CFD)模拟,以揭示单稳态快速不稳定性诱导的推力生成机制,这在之前的研究中尚未被分析。实验和模拟的详细设置可以在补充材料中找到。在PIV实验中的游泳机器人雷诺数(RePIV)为6500,基于指定的游泳速度和翅膀长度计算。对于CFD模拟,为了节省计算成本,使用较低的雷诺数(ReCFD)为1500。许多关于生物体和仿生应用的CFD研究已经发现,超过1000的Re可以消除粘性扩散效应,并且足以揭示也适用于更高Re的主要力产生流动机制。然而,为了确保CFD求解器中解析的流动物理现象真实反映现实情况,将尾流的二维横截面与PIV图像进行了比较,如图5A至F所示。尽管Re存在差异,PIV测量(图5A至C)和CFD模拟(图5D至F)展示了极好的一致性。
图5中展示的实验和模拟中的非定常尾流动力学揭示了其推力生成机制。软体游泳机器人在下拍快速通过(图5A和D)和上拍快速回弹(图5B和E)动作时各脱落一对反旋转涡。这些涡偶极子及其产生的射流负责推力的生成。分裂的快速通过和快速回弹射流在平均尾流速度图中更清晰地捕捉到(图5C和F)。当鳍快速通过时,上拍过程中在鳍下产生的正前缘涡(LEV)与脱落的正后缘涡(TEV)合并,导致更强的TEV偶极子,从而形成更强的快速通过射流。然而,这种涡合并机制在快速回弹时未被观察到。因此,快速通过产生的射流更强,从而产生更多的推力,相较于快速回弹。
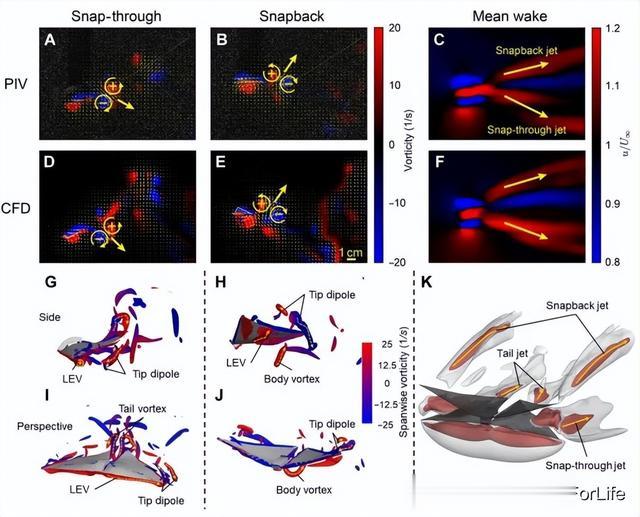
图5 单稳态拍翼游泳机器人中的单稳态诱导流体动力学
【通过简单的水下垂直障碍课程实现稳定导航】
这款软体游泳机器人通过简单地调节单一输入的驱动频率f(图6A)展示了多种可操控的游泳模式。在相对较高的f = 1.43 Hz时,它可以迅速从水底游到水面。一旦到达水面,它就能稳定地游泳并平滑过渡到快速的表面游泳模式,如图6A中的时间间隔图像i和图6B中的轨迹所示。当f略微下降,例如f = 1.25 Hz时,它会逐渐从水底上升到一定深度,并在该深度过渡到巡航游泳模式(图6A中的ii和B)。通过进一步降低f,例如f = 1.11 Hz,可以降低巡航游泳的深度(图6A中的iii和B)。图6B中的游泳轨迹显示,随着f的减小,上升角度(大约是斜率)也随之减小,当f = 1 Hz时接近零。在f = 1 Hz时,尽管其拍动翅膀与底部表面有相互作用,它仍能在水中底部过渡到稳定的类似爬行的游泳模式(图6A中的iv和B)。其水平游泳距离随时间的变化如图6C所示。类似于图3D中的表面游泳,由于在较高f下推力和升力的增加,平均水下游泳速度(图6C中的斜率)随着f的增加而增加。值得注意的是,当f固定时,增加附加重量与固定重量减少f对多模态游泳模式的影响相同。本文进一步探索了它在游泳过程中的负载能力。图6D显示,在高f = 1.43 Hz时,即使携带相当于自身重量的载荷,约2.2克,软体游泳机器人仍能迅速从水底游到水面。

图6 通过不同驱动频率在不同深度下调节软体拍翼游泳机器人(S: 157 mm)的水下游泳
这款软体游泳机器人具备在不同深度进行多模态表面和水下游泳的能力,只需简单地调节单一输入的驱动频率,就有可能通过更复杂的非结构化水下环境并避开障碍物。为了测试这一点,本文设计了一个简单的垂直水下障碍课程,由两块漂浮的平行泡沫板作为顶部障碍物,一块金属板作为底部障碍物(如图7A, i所示)。结果显示,通过调节f,从水底出发,软体游泳机器人可以灵活地操作,首先在较高的f下上升(例如,f = 1.43 Hz),然后通过降低f下降(例如,f = 1 Hz),再通过增加f再次上升(例如,f = 1.43 Hz),从而有效地避开障碍物,并通过S形游泳轨迹无碰撞地导航通过简单的障碍测试(图7A, i)。
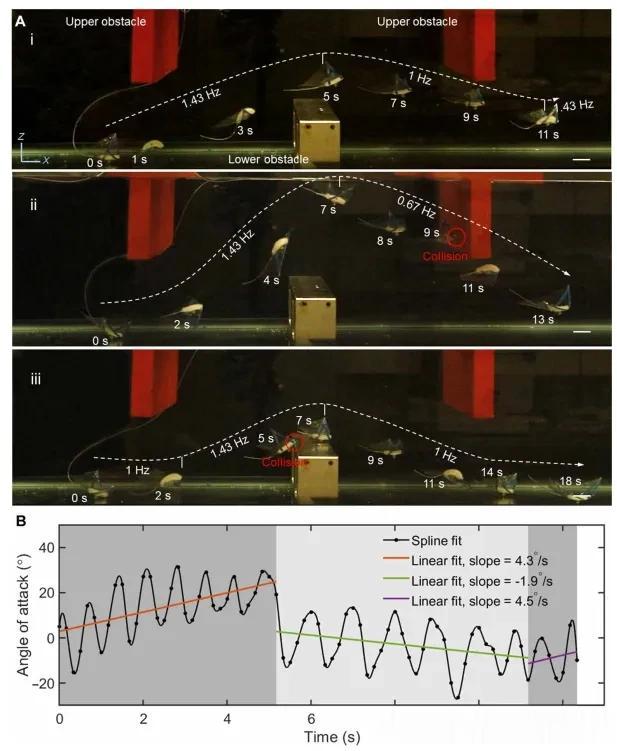
图7 以高碰撞弹性通过简单的水下垂直障碍课程导航
【无缆软体游泳机器人的验证性设计和户外游泳性能】
最后,本文探索了无缆单稳态软体拍翼游泳机器人的验证性设计,因为它具有简化的单输入驱动。图8A展示了无缆设计的示意图,其中包含一个泡沫货物,内含电路板、电池和气泵,集成在软体游泳机器人后方。无缆单元(电路板、电池和气泵)的光学图像如图8B所示。施加12伏峰峰值(Vpp)电压以驱动气泵来驱动软体游泳机器人。插图显示控制电路的输出驱动信号。为了提高操作效率,本文略微增加了气动软弯曲执行器、翼展长度和带状宽度的大小。增大的尺寸也由于充气和放气时间的延长,使驱动频率降低到0.77赫兹。图8C展示了软体游泳机器人在户外自然池塘中进行无缆游泳的时间延迟光学图像。其对应的游泳轨迹(在XY平面上)如图8D所示。尽管有风和水流的干扰,无缆软体游泳机器人在自然环境中表现出良好的稳定性和灵活性。它在约30秒的短时间内可以游超过1米的距离,达到相对游泳速度U为1.18 BL/s,在f = 0.77赫兹时,CoT仅为12.9。
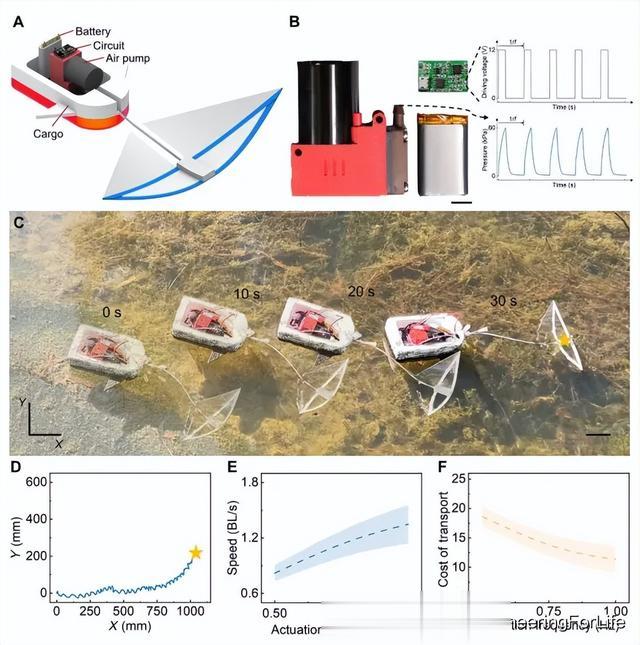
图8 验证性设计无缆软体拍翼游泳机器人的设计及其游泳性能
总结与展望
本文展示了利用单稳态翼中的自发回弹不稳定性来实现类似蝠鲼的软体拍动翼游泳机器人的设计,包括以低能量消耗实现创纪录的高相对游泳速度、多模态的表面和水下游泳模式、在非结构化水下环境中的高机动性和碰撞韧性,以及对抗干扰的稳定游泳。两个涡流对尾迹和分叉的断裂和回弹射流是产生高速游泳和高能效游泳性能的高推力的原因。频率依赖的提升使其能够通过简单地调节单一输入驱动频率在不同的深度游泳和导航通过带有障碍物的非结构化环境,而无需额外的鱼鳔。适应性强的软体游泳机器人-障碍物互动使其能够在不同上升或下降阶段承受并从碰撞中恢复过来。尽管前景广阔,实际应用仍存在局限性,尤其是在改进当前概念验证的笨重无束缚设计方面。为了将单稳态诱导的推力生成机制应用于现实世界应用,需要一种高度紧凑且集成良好的无束缚游泳机器人,其特征是在机载上集成无线控制模块、微型泵和电源系统,允许进行表面和水下游泳,这将通过未来的设计优化和系统集成来探索。
了解更多
关注“EngineeringForLife”,了解更多前沿科研资讯
