
文|大核有料
编辑|大核有料
自主水下机器人(AUV)对海洋探索及海洋安全具有重要作用。其中对于不明AUV的航迹进行预测,有助于更合理的展开围捕、对接、回收、侦察及追踪等作业任务。
因此AUV航迹预测问题吸引了国内外研究学者进行广泛而深入的研究。

目前,解决该问题相关的研究成果可以分为4种,第1种是基于运动学模型的AUV位置预测,有学者使用航位推算算法对已知数据进行推算,完成了AUV的位置预测。
第2种是基于神经网络模型的AUV位置预测,研究人员提出一种基于混合门控RNN的位置校正模型,AUV位置数据经过两层混合门控RNN和LSTM,再通过位置校正模型得到位置矫正输出,完成AUV导航位置预测,完成代行任务。

还有学者提出一种LSTM-SAC算法,来解决二维轨迹预测问题,通过提出一种深度学习的自适应导航算法,利用深度学习来减少系统误差,实现较准确的AUV位置导航与预测。
第3种是基于卡尔曼滤波算法的AUV未知预测,相关学者提出一种A-AECKF算法,来解决多AUV协同导航问题,进而用于AUV轨迹预测,并使用迭代的卡尔曼滤波算法(IKF)实现了AUV航迹预测。

第4种是基于多项式拟合算法的AUV位置预测,通过采用Hunting算法对目标移动轨迹进行多项式拟合,以完成目标轨迹预测,完成捕获任务。
以上基于神经网络对AUV的航路预测均取得了一定的进展,但均存在预测的滞后性问题。

今天我们提出一种基于信息压缩的改进GRU算法COMGRU,将AUV周围的障碍物位置信息、海流信息等地理位置信息纳入GRU预测网络考虑范围内,为防止数据维度膨胀。
通过提出一种基于地理位置信息的信息压缩方法,进而构成一种全新的COMGRU预测网络,旨在获取更好的多步预测效果,实现对AUV未来航迹的更加精确的定位。
«——【·AUV运动模型分析·】——»
时空轨迹:AUV的一条轨迹为:

AUV的位置点与其时空轨迹的关系如图1所示,由其位置坐标和时间组成的位置信息构成了按时间顺序排列的轨迹信息,在二维空间中,忽略时间信息,按时间顺序将位置点串联,即可得到某个区域上的一段轨迹。

AUV运动模型建模以及环境因素分析为建立AUV运动学模型,文章作出了以下简化和假设:
忽略传感器测量得到的AUV运动信号中所包括的波浪引起的周期性震荡的高频运动信号以及测量噪声,只考虑低频操纵运动信号;
假设AUV不能主动产生横向推动力,忽略通过AUV的波动鳍主动产生的用于姿态控制的偏航力矩与俯仰力矩;
假设AUV的进退运动以及升沉运动均不对其产生偏航影响;
假设AUV处于低速运动状态,忽略海流的非线性阻尼作用;

假设AUV在进行低速运动情况下,速度以及航向可以突变,即其运动轨迹以及速度曲线都可能不是平滑曲线;
不考虑AUV的动力源以及自由度不同所导致的运动学模型的差异性,将AUV视为质点进行分析,并将深海中的时变扰动视为统一的一个力,以实现对AUV的动力学模型的简化。
采用动态双积分模型描述AUV在欧氏空间的运动学模型:

在任务中AUV的行进目标点记为T,若在T不变、且不考虑AUV所受外力以及外界环境影响的情况下,可视为该段时间内AUV在起始点到该目标点的连线上进行直线运动,所产生的轴向推动力方向也由起始点指向目标点。
将该推动力视为目标点吸引力记为Fatt:

式中:O为该区域坐标轴原点;T为目标点位置;X为AUV所在位置,示意图如图2所示。

如图所示,OT为原点到目标点的矢量,OX为i号AUV到目标点的矢量,OT-OX为该AUV从当前位置到目标点的矢量,OT-OX为该矢量的距离。
由于自主避障策略的存在导致的AUV向自身与障碍物连线相反方向运动的推动力视为障碍项对AUV的排斥力,即外力,记作Frep,作用方向为障碍项到AUV连线的矢量方向;将海洋环境变化产生的时变扰动视为一个合力,记作Fenv。受力关系图如图3所示。

综上,AUV的动力学方程如下:

式中:F合为AUV受到的合力;θ为AUV行进方向与目标点方向夹角。
«——【·基于信息压缩的COMGRU多步预测网络·】——»
基于信息压缩的COMGRU多步预测网络,能够考虑更加复杂的障碍物分布情况以及海流变化对AUV航迹的影响,并且构建的多步预测网络能够实现对AUV航迹较为精准的多步预测。
由前文可知,AUV航迹受目标点位置、复杂环境作用力以及障碍物分布情况影响。

其中目标点位置往往不便确定且可能发生改变;在环境作用力中,海流与潮流是影响航迹中的经度与纬度的主要原因,然而潮流的变化性较大,受时间、深度等影响都会改变其参数,不适宜用于多步预测,相对而言,海流的性质更为稳定。
因此可以基于障碍物分布情况以及海流参数进行AUV航迹的多步预测。
地理位置信息表示:采用的地图为分布障碍物的二维栅格地图,如图4所示,黑色方块为障碍物,白色方块为无障碍物的机器人可处于的任一位置,采用直角坐标系法进行表示,左下角为坐标系原点。

其中地理位置信息包括障碍物位置信息、海流信息及AUV时空轨迹信息。
可将图4所表示地图视为一个20*20的二维矩阵,采用通用的方式,将障碍物所在位置赋值为1,其余位置赋值为0。
AUV探测半径内的地理位置信息是以该AUV为中心,以2*R+1为边长的正方形区域内的障碍物信息,其中R为探测半径。如图5所示。

AUV位置坐标、海流参数、探测区域内的障碍物信息可记录为一个地理位置信息向量,该向量由AUV所处横纵坐标、海流方向、海流速度、障碍物位置信息构成:

式中:X,Y分别为AUV所在位置的横纵坐标,即时空轨迹信息;d为海流方向以地理方位角表示,指海水流去的方向;v为海流速度;oi表示AUV探测半径内某个栅格的障碍物状态,是一个二值函数:

如图6为AUV探测半径为1时地理位置信息的记录情况。
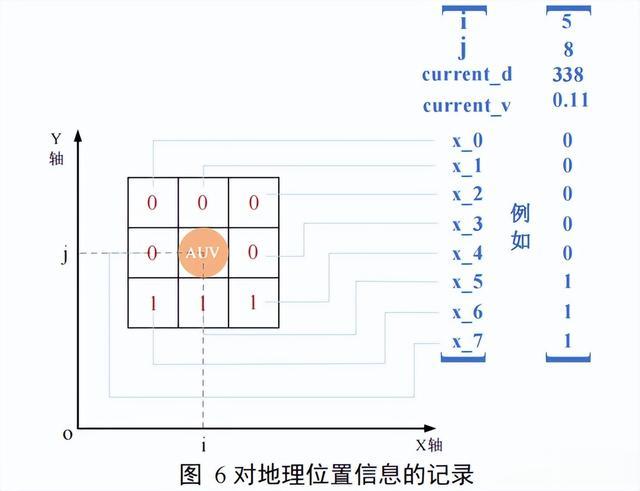
图6中,AUV探测半径为1单位长度时,探测区域共包含8个栅格,若某些位置处并没有栅格,则赋值为0占位。
将该8个栅格顺时针递增编号,并按此顺序填充地理位置信息向量,若该栅格存在障碍物,则在向量中该栅格对应位置赋值为1,否则赋值为0。
地理位置信息压缩:AUV周边栅格数量随着探测半径增大而增大,并且该信息向量中存在大量的无用信息(表示该栅格无障碍或不存在的数值“0”),有效信息密度小,导致训练时间增加。

地图中所记录的地理位置信息需要进行压缩。本文针对AUV自主避障问题,采用的算法是人工势场法。
根据人工势场法避障原理,障碍物所处栅格与AUV之间的距离r,与该障碍物体现在AUV自主避障上影响的斥力成反比。
为每一栅格[i,j]设置一信息量Iij,来表示该反比关系。显然,Iij为二值函数:

式中:i为该栅格对应的横坐标;j为对应纵坐标;rij为对应栅格与AUV的近似距离。
若限制AUV只能向X轴方向、X轴反方向、Y轴方向、Y轴反方向4个方向运动,则意味着AUV受障碍物斥力势力场的作用也体现在向该4个方向的运动,因此,可以将障碍物进行类似矢量分解:

式中:ijI为该栅格的信息量;α为AUV与该栅格之间连线矢量和X轴正方向的夹角;oX为沿X轴方向上的信息量分量;Ox-1为沿X轴反方向上的信息量分量;oY为沿Y轴方向上的信息量分量;oY-1为沿Y轴反方向上的信息量分量。
根据式(8)对探测范围内所有栅格的障碍物信息进行压缩后,可以得到压缩分量如下:

式中:X为AUV的横坐标;Y为纵坐标;d为海流方向;v为海流速度;Q为探测范围内除AUV栅格外的栅格数量。
根据此法对地图中AUV航迹的地理位置信息进行压缩,所得压缩向量维数固定为8,从而能够实现对输入维度的限制。
如图7所示,为障碍物信息向量矢量分解的示意图。

如图7所示,搜索半径为2栅格单位,序号为0的栅格处存在一障碍物obstacle,则该栅格处信息量为0.5,可矢量分解为0x=0、Ox-1=0.5√2、0Y=0.5√2、0Y-1=0。
AUV的x轴坐标为3,y轴坐标为3,海流方向为337°,海流速度为0.1m/s,则压缩地理位置向量为[3,3,337,0.1,0,0.5√2,0.5√2,07]。
COMGRU多步预测网络:时间序列预测是根据当前及历史序列数据推算出未来时间序列的值。

在文中的研究背景下,观测数据是AUV的位置信息,即坐标[X,Y],这就将问题转化为机器学习中的监督学习问题。
那么,AUV航迹预测网络的功能就可描述为根据过去至现在w个时刻的AUV位置坐标/地理位置信息,预测随后p(预测步数)个时刻AUV的位置坐标序列。
普通GRU实现AUV航迹多步预测的步骤如图8所示。

本文所构建的COMGRU多步预测神经网络结构图最终如图9所示。
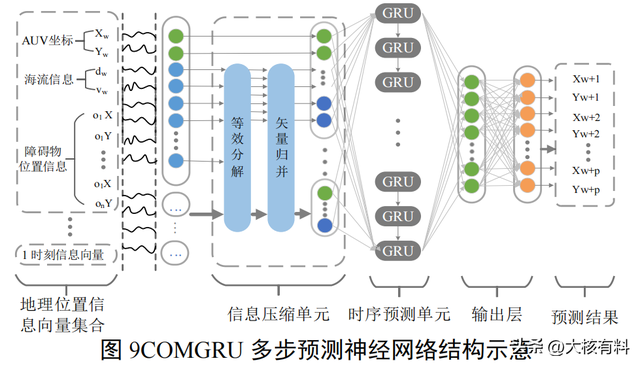
在整个神经网络中,输入数据为连续w个时刻的AUV航迹位置信息、海流信息以及障碍物位置信息组成的形如式(5)地理位置信息向量集合。
将每一时刻的地理位置信息向量根据前文的信息压缩方法进行压缩,得到最终压缩后的形如式(9)信息向量,信息向量经过时序预测单元,对GRU预测网络进行训练,经过一定次数的训练得到理想的预测模型。

将压缩后的信息向量作为模型的输入信息求解预测航迹,时序预测单元的输出数据经过输出层,进行维度调整以及数据类型转换,最终获得未来p步AUV的航迹坐标信息。
«——【·结果分析·】——»
数据集与评价指标:通过构建分布障碍物的栅格地图,在给定的海流信息的基础上进行从起点到终点的路径规划,获取AUV航迹数据,并使用插值法对数据进行扩充,获得地图中AUV的航迹变化数据集进行实验。
实验根据模型训练时间、拟合效果、平均绝对误差(MAE)、均方根误差(RMSE)等评价指标来评价本模型的性能。
其中,平均绝对误差是对所有预测数据与真实数据误差的绝对值取平均:

均方根误差是对均方误差进行了开平方操作:

平均绝对百分比误差是衡量模型的完美程度的指标:

实验目的是研究改进后的COMGRU预测网络的性能表现以及信息压缩对COMGRU预测网络预测性能的影响。
实验方案是将未经信息压缩的原始GRU多步预测网络、未经信息压缩的COMGRU多步预测网络与经过信息压缩的COMGRU多步预测网络三者的航迹预测效果进行对比。
该实验所采用的地图如图4所示,起点在左上角,终点在右上角,在地图中采用蚁群算法规划从起点到终点的路径,在移动时根据海流速度提高其向海流方向处移动的概率,如图10所示。

作为AUV的航迹原始数据集,并对该数据集进行均匀插值处理,扩充到4300*2维度。
训练数据时间步设置为100,预测步长设置为40,代表令预测模型以100步时空轨迹数据预测后40步AUV位置信息;训练轮数设置为50轮,dropout设置为0.3。

设置AUV的探测半径为0.1m,则在原始GRU预测网络采用的信息向量数据格式示例如表1所示在COMGRU多步预测网络中,未经信息压缩的对照组信息向量格式同表2,经过信息压缩的实验组信息向量示例如表3所示。

采用未经信息压缩的COMGRU多步预测网络,和经过信息压缩的COMGRU多步预测网络对AUV航迹进行预测,拟合结果如图11所示。

由图11可知,传统的GRU组拟合效果明显存在滞后现象,而另外2组COMGRU组拟合效果较为准确。
其中,未经信息压缩组拟合效果较为精确,并且,经过信息压缩组在航迹突变处存在反应过快或过慢的问题,可能是由于信息压缩改变了障碍物信息量,无法与未压缩的障碍物信息完全等效。
为更精准地对比模型预测精度以及训练时间,使用压缩与未压缩信息的COMGRU多步预测网络,以及原始GRU网络分别进行10次实验,取实验的模型训练时间、MAE、RMSE计算平均值,结果如表4所示。

由表4可知,相较于未压缩的COMGRU多步预测网络,经过信息压缩的COMGRU多步预测网络预测精度略微下降,其中MAEV上升5.54%,RMSEV上升4.96%,而训练时间增加2.46s。

经过信息压缩的COMGRU多步预测网络相较于原始GRU预测网络,评估预测精度的指标MAEV以及RMSEV下降明显,其中MAEV下降14.16%,RMSEV下降13.22%,即预测精度获得较大的提高,而训练时间仅增加1.22s。
«——【·结语·】——»
信息压缩的COMGRU多步预测网络相较于未压缩的COMGRU多步预测网络,预测精度略微下降,但有效的避免了维度膨胀,从而减少了训练时间。

相较于原始GRU网络,经过信息压缩的COMGRU多步预测网络的预测精度显著提高,大大减少了预测的滞后性,训练时间只是小幅增加。
