
文|大核有料
编辑|大核有料
机器人路径规划是对于可移动机器人在一定空间区域内,通过相应算法根据当前位置与任务目标点的位置以及路径的性能指标,使其规划出一条安全的路径。
目前,常用来解决机器人移动路径问题的规划算法有蚁群算法、人工蜂群算法、RRT算法、A*算法和遗传算法等。

上述方法对机器人路径规划的发展起到了促进作用,但也有一定局限性。如蚁群算法鲁棒性强,但计算量大;人工蜂群算法参数少,但解的精度较低;
RRT算法结构简单,但后期节点使用率不高。粒子群算法常用于机器人路径规划研究,例如全局静态、局部动态以及高维度复杂问题等。该算法原理简明、设置参数少且易于实现。

本文主要对粒子群算法在机器人路径规划中的应用进行论述。通过分析算法特点,从粒子群分群、初始化改进、参数优化以及融合优化等四个方面展开讨论。
那么针对粒子群算法对于不同环境下机器人路径规划应用出现的局部最优路径和运行速度变慢等问题,如何快速解决这些问题,才能提升机器人路径规划的效率呢?

«——【·粒子群算法基本原理·】——»
粒子群算法是模拟鸟群觅食的仿生算法,在1995年提出,粒子群算法中每个粒子即优化问题的解,具有速度和位置属性,通过更新信息找到最优解。
由路径规划问题的优化条件确定适应度函数,其适应度值是判断解的标准。

设N维环境,种群为m,粒子i的位置为xi={xi1,xi2,⋯,xiN},粒子i的速度为vi={vi1,vi2,⋯,viN},粒子i在搜索空间中第d维分量(1≤d≤N)的速度和位置变化公式为
式中:t为迭代次数;pid(t)为第t次搜索到最优位置的d维分量;pgd(t)为第t次搜索到全局最优位置的d维分量;ω为惯性权重;c1和c2为加速因子;r1和r2是[0,1]随机数。
该算法基本流程如图1所示。
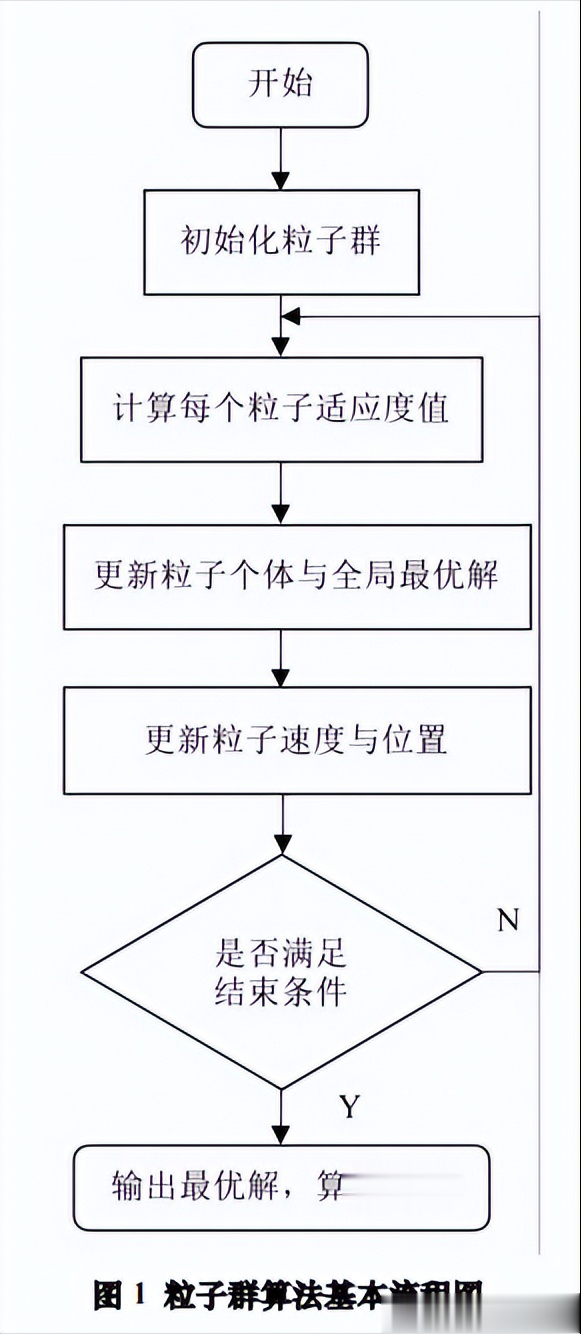
粒子群算法解决机器人路径规划问题时,主要由初始化、适应度值以及解更新组成。
首先,对种群初始化;接着,计算粒子的适应度值;最后是解的更新,若满足结束条件即算法结束,否则继续循环。
«——【·粒子群算法的研究优化与发展·】——»
粒子群算法结构简易、前期收敛速度快以及全局并行寻优能力好,但存在陷入局部最优和收敛变慢问题。
许多学者对上述问题进行研究,算法在机器人路径规划问题中的优化以粒子群分群、初始化改进、参数优化、算法融合为主,如图2所示。

粒子群分群:在机器人路径规划问题中,分群算法比单种群算法可获得更好的效果。分群的搜索方式丰富种群多样性,解决了该算法易陷入局部最优的问题,本文将粒子群分群方法归纳为分阶段寻优和同时寻优。
分阶段寻优:群落之间分阶段寻优,有学者将种群分为粒子分群与混沌分群,第一阶段分群各自寻优,若粒子陷入早熟则进入第二阶段,通过分群中的粒子交叉替代,解决早熟问题。

使用精英粒子群判断算法是否陷入局部最优,将子群中最优粒子替换精英粒子群的最差粒子,实现全局最优。
研究人员选择各子群最优粒子放入种群基因库,最后阶段从库中选择优质粒子替换子群最差粒子,提升算法全局求解能力。

同时寻优:群落之间同时寻优,对主群采用传统更新方式完成算法收敛,副群吸收蛙跳算法更新方式得到全局解,优化机器人路径。
将粒子分为两种,一种是结合遗传算法的算子,另一种是结合细菌觅食算法的趋化处理,提高算法求局部解的能力,根据不同机器人的任务建立粒子群联盟,优化多目标搜索。
根据适应度将种群分组,各组群最优粒子搜索全局最优解,组群内粒子结合模拟退火搜索局部解,该方式平衡了局部与全局寻优。

或者将粒子群划分为侧重全局和局部搜索两种,通过共同最优位置增强信息共享方式,提升算法寻优能力。
采用k均值聚类将种群分为若干子群,由最优粒子的速度和位置引导迭代更新,提升算法搜索能力。

上述方法解决了算法迭代后期种群产生趋向同一化的问题,其中分阶段寻优搜索能力强,但算法较复杂。
同时寻优通过群落之间协同搜索丰富粒子多样性,但各群体同时搜索会消耗机器人一定的资源。
粒子群初始化的改进:机器人路径规划受种群初始化影响,若算法采用随机初始化策略,寻优结果不一定收敛到局部或全局最优。

因此,初始化在寻优时起到重要作用,适宜的初始化范围可加快收敛,避免陷入局部最优,本文将粒子群初始化方法分为启发策略和改进初始位置。
启发策略:启发策略是基于图搜索算法的解初始化粒子群,结合A*算法的解作为粒子群启发信息。
通过A*算法规划全局路径解决粒子群算法出现局部最优问题,采用高效的A*算法收集启发式信息进行粒子初始化,避免产生局部极值。

改进初始位置:种群分布位置的初始化改进,在粒子初始化时引入反向学习机制,选择距离目标点近的粒子作为初始粒子,优化收敛。
解决全局规划问题时,将人工势场法的引力系数、斥力系数以及距离作为算法中粒子空间位置进行优化。
在粒子初始分布时采用混沌逻辑映射方法,将恒加速度系数和最大速度作为自适应线性变化系数,以适应优化过程。

而采用混沌随机方法生成初始粒子,在粒子群算法中引入速度分类系统,解决局部最优问题。
上述改进方法通过优化算法对种群初始化,加快收敛速度,使初始种群尽可能覆盖目标搜索空间,避免算法陷入局部最优,使机器人更好的找到全局最优位置。
粒子群算法参数优化:粒子群算法的参数选择会影响机器人路径规划效果。目前,常用的是依靠经验选取参数。

该算法在参数选取的指导方法上还有待进一步研究,本文将粒子群参数优化方法分为固定优化模式和自适应优化模式。
固定优化模式:固定优化算法参数,通过轻微干扰最优粒子速度改进算法收敛能力,使用非线性惯性权重平衡局部和全局的解。
使用变异操作使粒子保留搜索经验再进行变异,解决种群多样性下降问题。

结合时延速度权值改进算法,提升算法收敛能力,在将均匀分布、指数衰减惯性权值相结合,引入增强控制的学习因子,提升收敛速度。
以路径节点作为粒子编码,路径节点个数表示样条曲线个数同时也决定路径转向次数,提升多机器人规划效率。
改进惯性权重和加速度因子避免算法陷入局部最优,用适应度方差衡量粒子多样性,克服算法早熟。

对粒子在保留大部分先前搜索经验的同时进行突变操作,使粒子脱离局部极值。
自适应模式:自适应优化粒子群算法参数,使用自适应惯性权重平衡全局与局部搜索能力,采用自适应学习因子优化粒子位置。
提出自适应引力系数,通过种群快速向目标靠近,提升搜索速度,通过自适应加速因子调节算法迭代过程中的搜索能力。
粒子进化速度与群体离散速度使惯性权重具有自适应性,引入自然选择方法保持粒子多样性,在算法各阶段自适应调整惯性权重从而提升算法寻优能力。
上述方法通过实验优化调整算法参数或引入新的优化参数,解决参数问题,提升机器人的效率。
粒子群融合算法:粒子群融合算法路径规划一般是将粒子群算法与其他算法(智能搜索算法、几何模型算法以及局部避障算法等。

结合应用在路径规划问题中,实现算法优势互补,提升机器人路径寻优能力,将融合优化方法分为优化适应度函数、优化参数、增强多样性以及粒子群优化其他算法。
粒子群算法的适应度函数是评价规划路径的性能指标,影响寻优效果,根据应用环境设计适应度函数,使算法获得最短路径。
算法融合后优化参数,结合模糊控制法优化粒子群寻优方式,由不同指标权重得到融合机制下的参数,将其应用在舰船三维路径规划中,提升算法在空间中的路径规划能力。

算法融合后增强种群多样性,使用神经过程预测粒子位置,增强多样性。,结合差分进化算法,动态调整变异概率和缩放因子,解决局部最优。
融合牛顿法,用马尔可夫链优化迭代时两种算法的选取,避免搜索停滞,使用差分进化算法的变异、交叉、选择操作改进种群多样性,优化动态避障。
根据粒子群算法优点,运用到其他算法优化问题中,使用加入变异算子的多目标粒子群算法实现动态窗口法权重系数的动态调整,提升机器人的安全性。

粒子群融合算法在机器人路径规划应用中取得了有效进展,融合寻优的方式使算法相对复杂,可进一步研究降低融合算法复杂程度的方法。
«——【·结语·】——»
粒子群算法在机器人路径规划中的应用取得了丰硕成果,将该算法在当前领域使用的优化方法进行总结,见表1。

粒子群算法在机器人路径规划问题中的理论研究与应用等方面有着进一步的发展空间。
高维复杂问题的应用粒子群算法在处理机器人高维复杂路径规划问题时可能会出现早熟收敛,并且目前在空中作业和水下作业的机器人对三维环境下的路径规划能力要求较高,算法在机器人路径规划研究中可朝着高维度和复杂环境迈进。
未知环境的应用粒子群算法在处理机器人未知环境或动态环境下的路径规划问题需要结合传感器得到相关环境数据,对于使用粒子群算法和其他优化算法相融合,再根据机器人的多个传感器反馈的环境信息进行实时路径规划的问题,将会是需要深入研究的内容。

多机器人协同的应用粒子群算法在处理多个机器人共同工作的路径规划问题时,根据问题特性需将多个不同子任务分配给机器人。协同工作方式可有效节约机器人运行时间。
同时,这种方式也增加了算法的复杂程度。因此,粒子群算法在多机器人路径规划领域还有待进一步发展。

理论发展粒子群算法在机器人路径规划中如何优化参数设置、收敛速度以及分群搜索等问题需要深入研究。
并且粒子群算法属于一种概率算法,从数学领域证明算法结果的可靠性存在难度,有待进一步丰富将其应用在机器人路径规划领域的算法理论成果。
