
文|大核有料
编辑|大核有料
目前,具有高机动性的轮腿机器人引起了越来越多的研究兴趣,特别是在灾害救援、作战平台和资源勘探方面。
但是机器人在实际应用中往往需要高精度的控制效果,因此如何实现轮腿机器人高精度的跟踪控制成为了机器人领域研究的重点。
轨迹跟踪是自主机器人的关键优势,跟踪性能在实际工程中起着至关重要的作用,以网络物理网络中运行的四轮电动汽车为例,提出了一种时滞线性二次型调节器(LQR)控制方案。
针对自动泊车系统,有学者提出采用无模型自适应滑模控制方法确定积分饱和之间的关系,也有研究人员提出了一种新的基于视觉的模型预测控制(MPC),以保证轮式移动机器人在极坐标系下跟踪目标。
然而,上述技术没有明确反映机械不确定性和未知的动态相互作用,例如多重外阻力、机械结构和高有效载荷条件,这可能导致跟踪控制的不确定性和不精确性。
为了获得令人满意的控制性能和对环境干扰的鲁棒性,研究人员提出了一种主动自适应模糊控制,采用模糊方法对不确定非线性进行评价,并采用自适应方法对未知参数进行耦合。
为了有效地约束摩擦和未知外部干扰的物理边界,引入了基于信号延迟的轮腿机器人大转矩分配算法的二次规划(QP),采用自适应神经网络(ANN)控制方案,有效减小了控制误差。
针对非负开关函数,有学者设计了一种模糊控制器,并用修正法实现了一类摄动非线性系统的参数自适应。然而,这些轮腿机器人大多是串联机构,体积小,负载弱,与实际应用情况相比存在较大差异。

为了同时保证轮腿机器人的轨迹跟踪精度和重载稳定运行,本文提出了一种基于模糊逼近的轮腿机器人模型预测跟踪控制方法。
对考虑重载条件下的轮腿机器人进行建模,另外基于神经模糊逼近的模型预测跟踪控制可以评估不确定性动力学和外部干扰,提高轨迹跟踪精度。实验结果证明了提出控制器的有效性。
«——【·问题描述·】——»
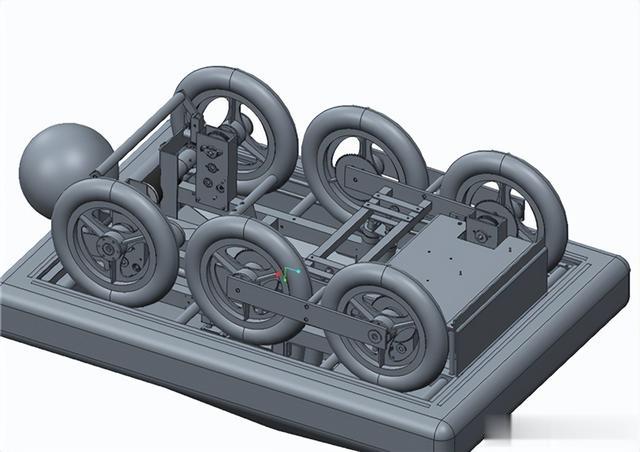
四轮腿机器人的并联机构如图1所示。
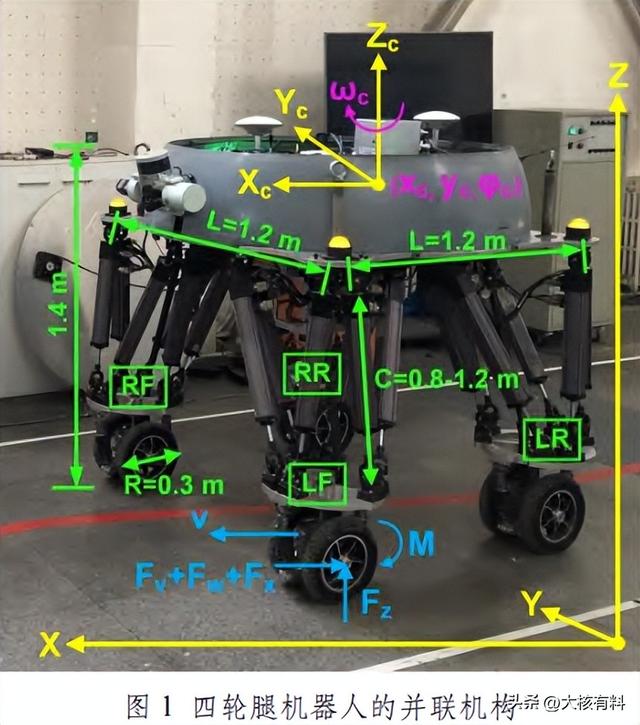
机器人系统可描述为:
假设车轮和地面在滚动,即不发生横向运动,非完整约束表达式为:

上式约束可以转化为:

然后,四轮腿机器人的运动学模型可以表示为:
考虑到机械不确定性和外部动力学的影响,根据欧拉-拉格朗日方程将非完整约束的轮腿机器人描述为:

其中M(q)∈Rn*n表示对称正矩阵;qeR"表示广义坐标;C(q,q)∈R""表示Coriolis矩阵。
G(q)eRn表示重力矢量;F∈Rn*n表示电动缸摩擦、弹簧力等机械不确定性,以及滚动阻力、路面摩擦等外部动力学;λ∈Rn表示驱动力矩。
将非奇异矩阵S(q)定义为:
其中ST(q)JT(q)=0。根据控制变量u=[vc,wc]T.,可将运动学模型和动力学模型表示为:
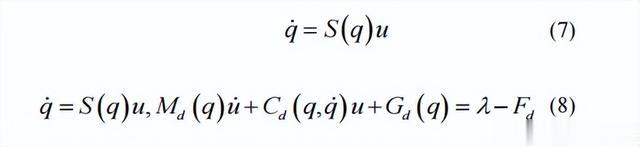
其中
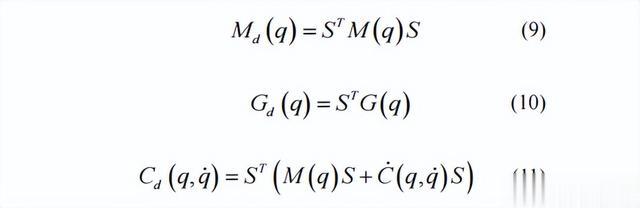
性质1:将Md(q)定义为对称正定。
性质2:Md(q)、Cd(q,q)、Gd(q)和F有界。
性质3:对于VεR2,斜对称矩阵Md-2C可以表示为εT(Md-2Cd)ε=0,其中Vε≠0。
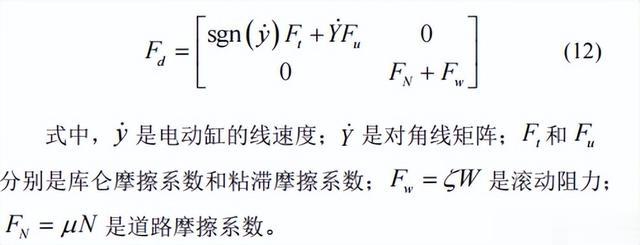
然后,根据电动缸的摩擦模型,Fd可以描述为
位置空间解耦是六自由度运动平台有关轮腿机器人转向关系的关键问题,即伺服电机的控制变量依赖于当前的位置和姿态。
设OB-XBYBZB为参考坐标,Ou-XuTuZu为移动坐标。底座和六个伺服电机的组合为B(i=1,2,...,6),运动坐标系中的坐标为U(i=1,2,...,6)。
定义θx,θy,,θz:分别是x轴,y轴和z轴的旋转角度。
△x,△y,△z.是相应的位移。那么,有
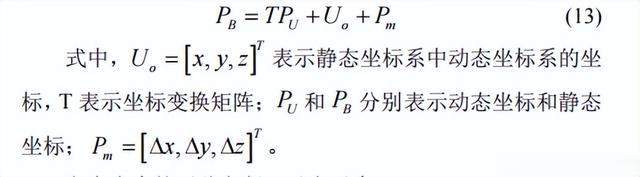
六自由度的平移方程可以表示为
进一步可得到转动方程为
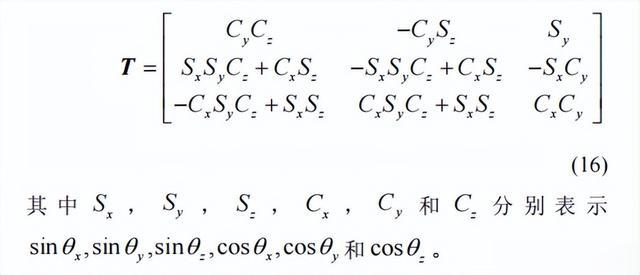
性质四:θx,θy,,θz分别表示机器人系统的横向移动角度、俯仰、偏航;正旋转方向为右手螺旋;旋转顺序为X→Y→Z。
因此,位置变换矩阵可以表示为:
此外,每个电动缸△Li的偏移量的表达式为:

因此,瞬时角速度ω和方位角之间的导数关系为
雅可比矩阵表示驱动机构与机器人平台之间的映射关系,定义式如下:
OB-XBYBZi中的坐标可以描述为

由式(13)可得
因此,式(17)可以转换为

其中,J2是q到平台vb的传递矩阵,那么可以得到
此外,传递矩阵J1表示连接点vb到电动缸y。根据方程式(17),可以得到


式中,J1是vb到y的传递矩阵。J1的表达式为
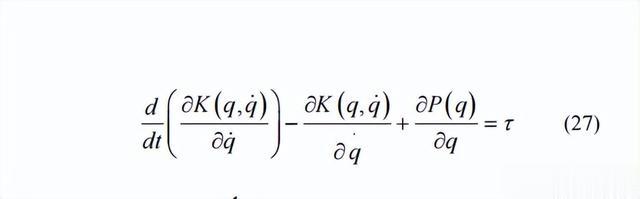
因此,J=J1J2表示六自由度并联平台的雅可比矩阵。进一步分析轮腿机构,可以根据拉格朗日方程来定义运动函数:
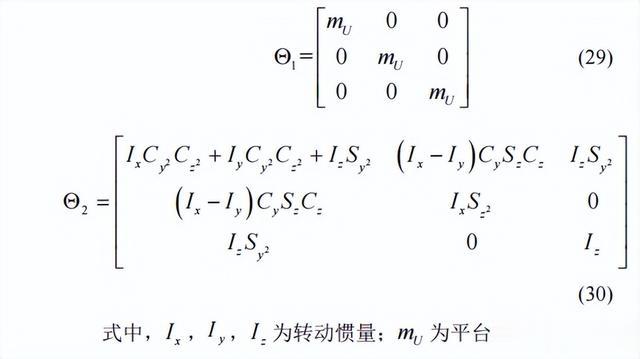
据此M(q)可表示为:

其中
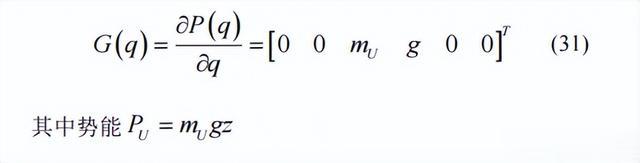
另外,引力矢量G(q)定义式为:
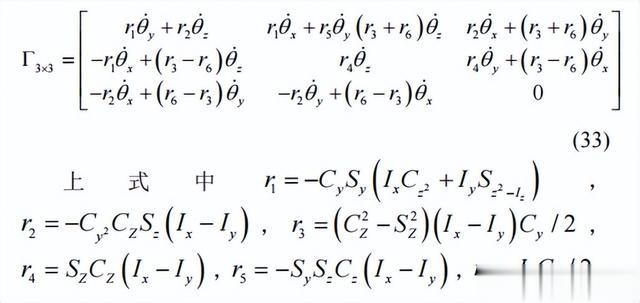
C(q,q)定义式为

其中
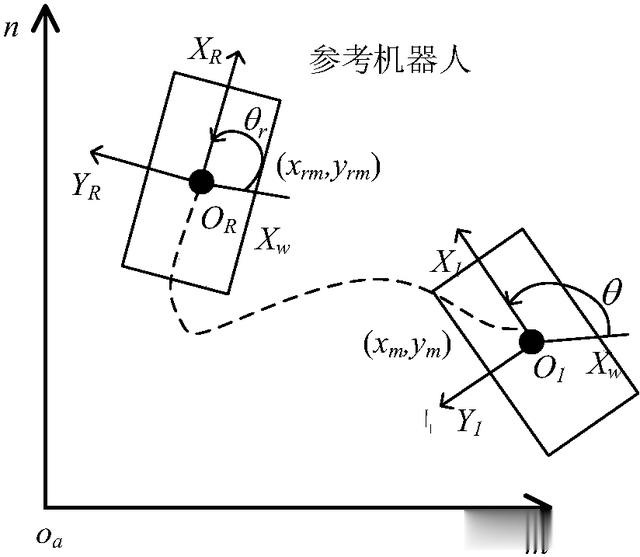
另一方面,本文假设机器人的轨迹是按照以下参考系统创建的:
性质5:期望信号(vd,ωd,vd,ωa)是有界的,满足如下情形:

其中T,μ>0,且▽t≥0。因此,本文提出的具有不确定动态和外部扰动的自主跟踪控制方案等价于将跟踪误差和动态扰动约束为零。
其中χe表示跟踪误差,d表示动态扰动。
«——【·控制器·】——»
机器人系统在运行过程中会受到系统质量、转动惯量、外摩擦等不确定性因素的干扰。这些因素会导致机器人失控。

因此本文提出了一种四轮腿机器人的自主跟踪控制器,采用神经模糊逼近方法来抑制有界干扰和非结构干扰。
神经模糊逼近的框架如图2所示,该网络分为四层,包括输入层、隶属层、归一化层和输出层。

未知函数定义式如下:
那么可以得到:
模型预测跟踪控制:介绍了轨迹预测跟踪控制,同时利用神经模糊逼近对不确定的物理交互进行了估计。
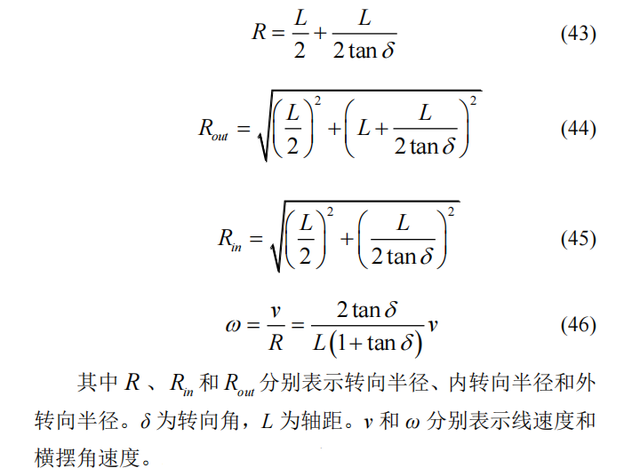
预测跟踪控制器需要确定三个步骤,包括误差函数、系统约束和优化函数。动力学模型之间的关系如图3所示。
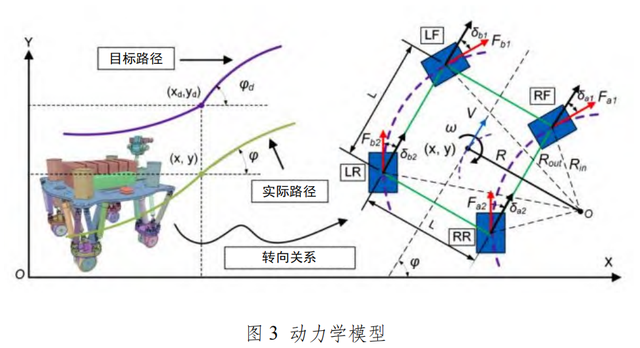
运动学模型可以表示为
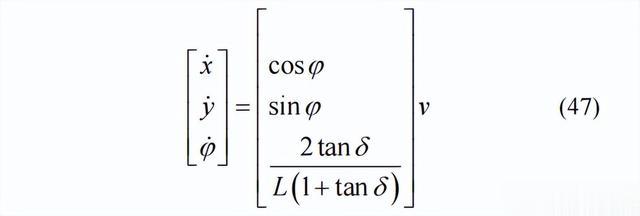
其中

其中(x,y)表示机器人坐标。δ和φ分别表示转向角和偏航角。此外,模型可简化为:

上式中u(v,δ)是输入变量和x(x,y,φ)是状态变量。同时,将期望轨迹函数设置为:

根据泰勒公式,方程(49)可表示为:

根据式(50)-(51),误差关系可描述为
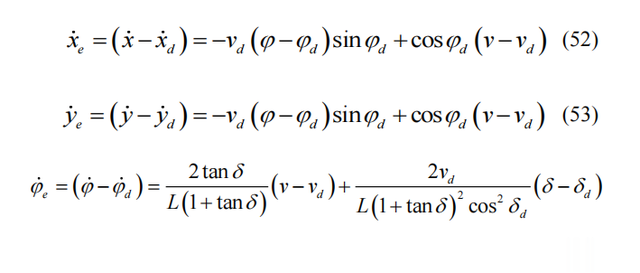
误差函数处理式如下:
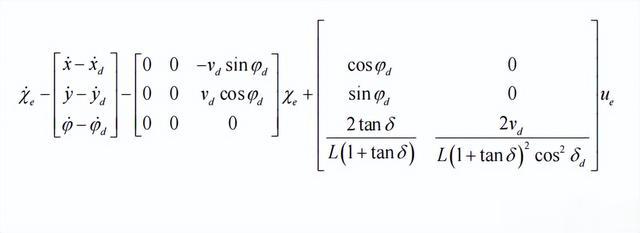
因此,误差函数的离散时间模型可以表示为:

其中
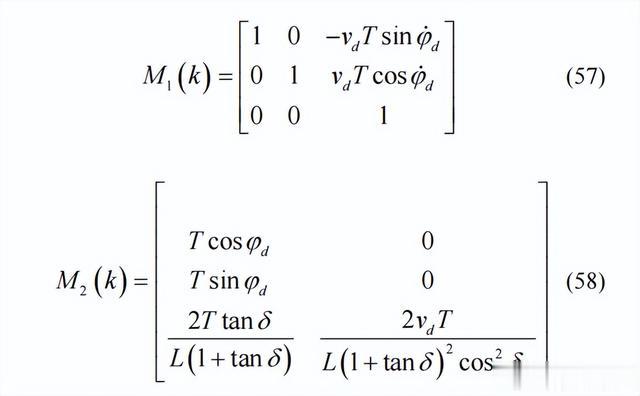
其中T是采样时间。为了顺利满足粒子机器人系统高性能的要求,目标函数可表示如下:

其中Q和L是加权因子。注意,前者表示机器人系统的跟踪能力,后者描述了机器人系统的自我约束能力,说明MPC控制器在消除机器人系统的不确定性和外部干扰方面的能力有所减弱。
在相关工作中,神经模糊理论可以有效地逼近动态误差。系统约束可以描述如下:
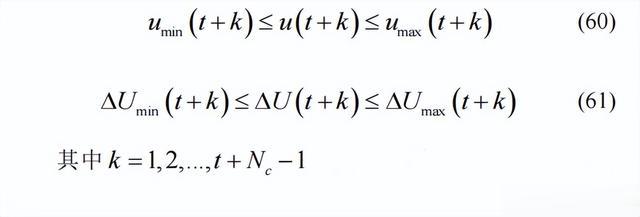
因此,预测控制器的输出的表达式为:
此外,还可以利用Lyapunov方法进一步评估预测控制器的稳定性,该方法思想是使用每个循环的目标函数的最优值S0(k)作为Lyapunov函数。
稳定性和正定的稳定性一致,其导数是负定的。首先,误差函数(56)的离散时间模型可以表示为:

根据目标函数,每个周期的控制输出可归结为以下优化函数:
S0(k)是正定的,因为目标函数(59)中的权重因子是非负的,然后,进一步考虑导数是负定的。为简单起见,假设预测范围和控制范围等于N。
同时考虑终端约束x(k+N|k)=0,得到

由于神经模糊逼近输出对所有输入都是有界的,因此本文相关工作可以满足并验证有界输入有界输出稳定性。
基于整体控制方案,模型预测跟踪控制的神经模糊近似框架如图4所示。
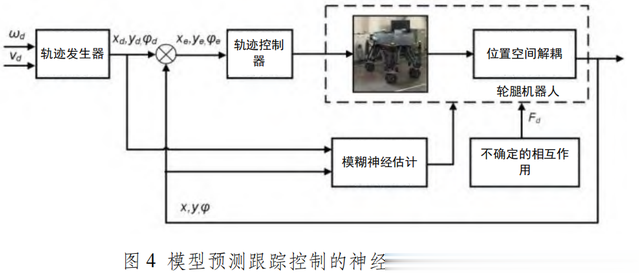
轨迹发生器模拟期望路径,将位置信息传递给机器人系统的运动学和动力学模型。然后,根据横向位置、纵向位置和航向角的误差,采用模型预测跟踪控制器实现无扰动状态下的路径跟踪。
针对轮腿机器人的模型不确定性和外界干扰,采用神经模糊逼近算法消除不确定的物理交互作用。

«——【·系统描述·】——»
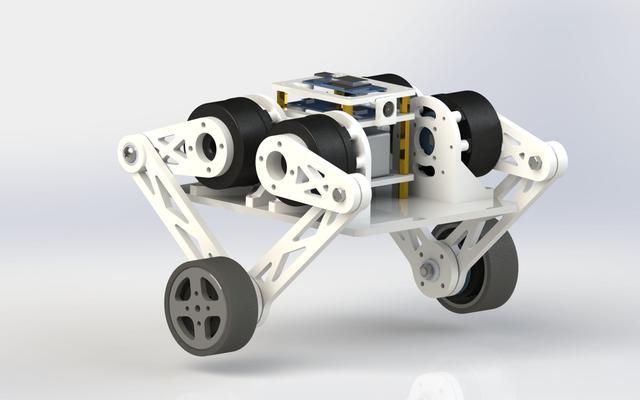
基于六自由度Stewart并联平台运动学和动力学优点,研制了电动并联轮腿机器人(BIT-NAZA),将轮腿运动的快速性和稳定性与腿部运动的强适应性相结合,使机器人的运动更加灵活多变,本文模型概念和轮腿机器人平台如图5所示。
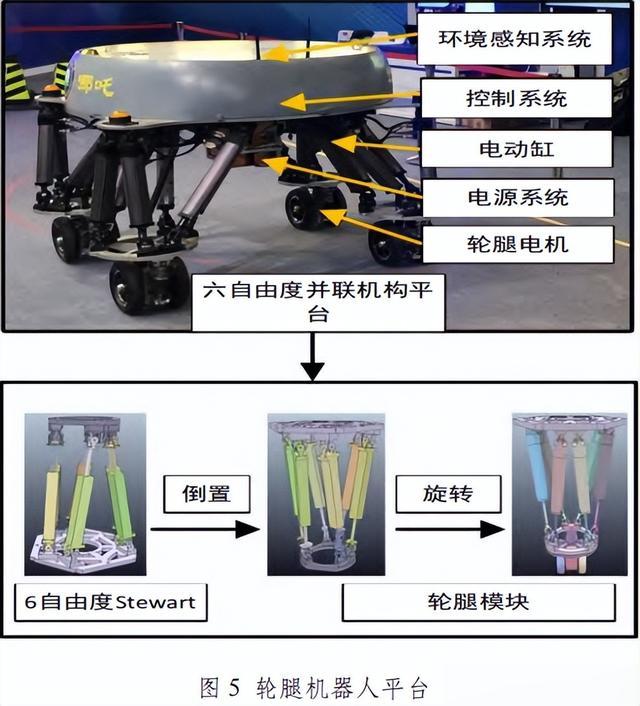
逆Stewart并联平台与驱动轮构成轮腿复合机构,获得了四足步行、四轮独立驱动、轮腿复合运动的新运动模式。
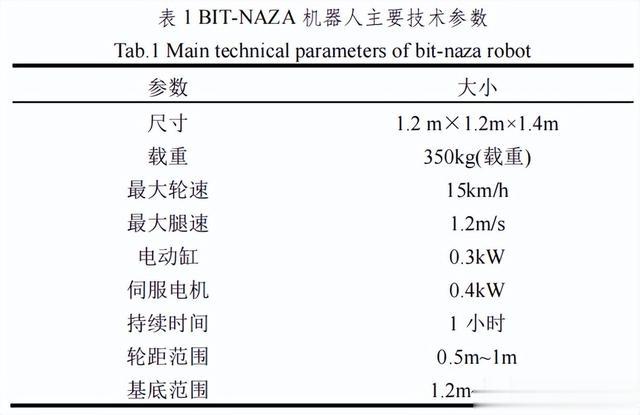
BIT-NAZA机器人主要由控制系统、环境感知系统、电源系统和并联机械结构组成。其中,运动平台是机器人的关键,包括电动缸、伺服电机、悬架系统和减速器,主要技术指标见表1。
轮腿式机器人的多个网络化网络物理系统如图6所示,传输网络包括TCP/IP网络、RS232通信通道和CAN总线。
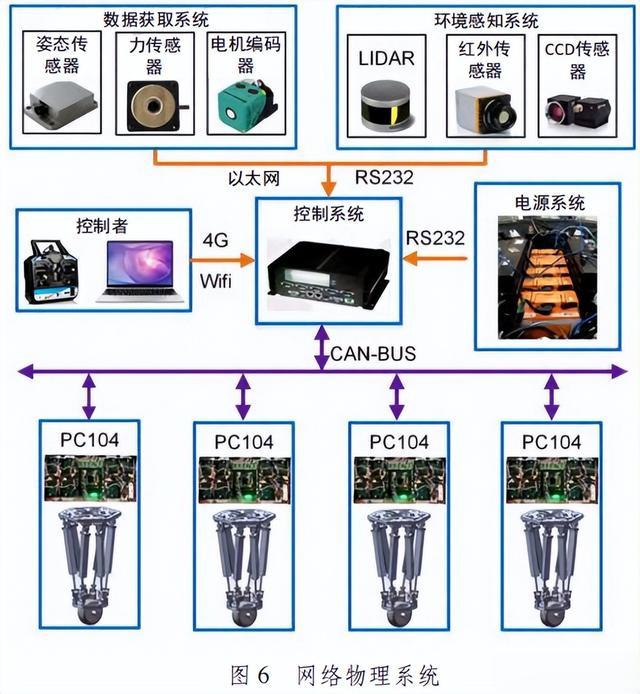
机器人在工作时,通过UDP通信技术传递状态信息,通过CAN总线进行协同传输。姿态传感器通过RS232网络传输,该机器人装置采用直流电机和电动缸作为驱动元件。
选择启动腿部运动的电动缸为GSM20-1202,行程为300mm,为了使转速和转矩与应用要求相匹配,底层控制器采用单片机/SGX1-PC104模块。
特别是,为应用程序选择的电机驱动器是Elmo。能源系统为48V20Ah动力电池。
环境感知系统的主控芯片是TX2(CPU:ARM+Denver2;GPU:Pascal-GPU,256个CUDA核)。
实现环境感知、路径规划和决策控制采用的系统为ROS1.0和Ubuntu16.04。
受益于电动并联机构,四轮腿式机器人表现出特殊步态和有效运动的优势,且有效载荷较大。
为了说明BIT-NAZA机器人与其他轮腿式机器人相比具有优越的运动能力和灵活的并联结构,进行了轮轨切换、机器人高度变化、协同控制越障和重载行走实验,结果如图7所示。
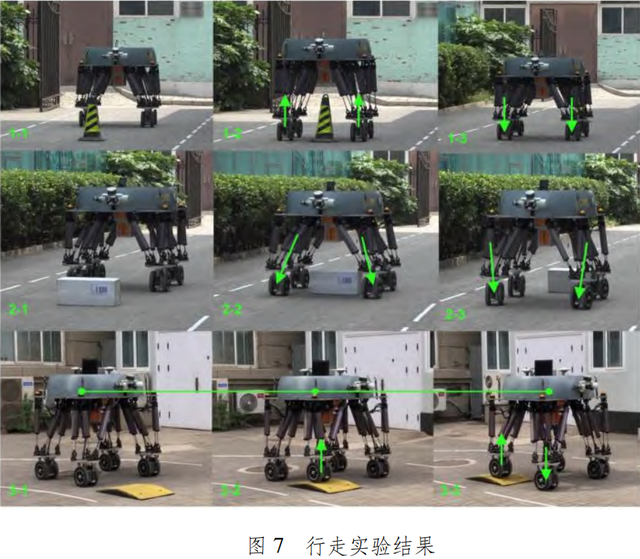
当障碍物宽度大于运动姿态时,机器人能自动切换轮轨通过障碍物。类似地,机器人将切换中心高度以越过障碍物。
此外,该机器人还可以通过四轮腿协同控制,通过非结构化的道路条件,NAZA机器人能在重载(250kg以上有效载荷)和复杂环境下正常工作,在物资运输、应急救援、无人作战平台等实际工程中具有重要意义。
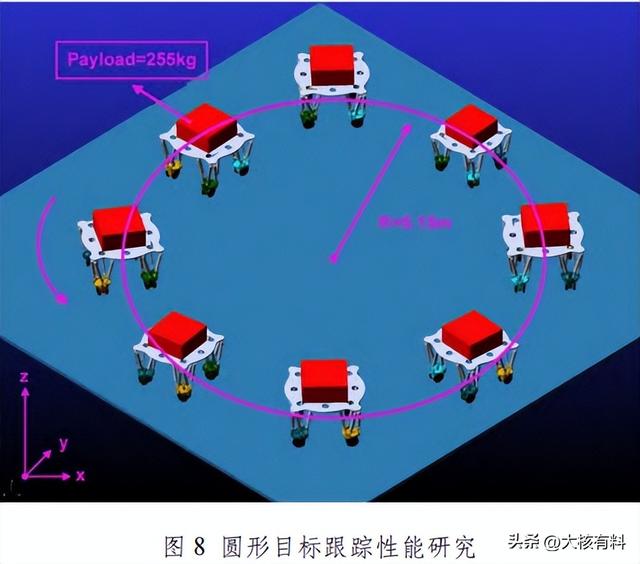
利用MPC和NFMPC对一个半径为5.15米的圆轨迹进行了正弦输入不确定物理交互作用下的跟踪实验,跟踪性能如图8和图9所示。
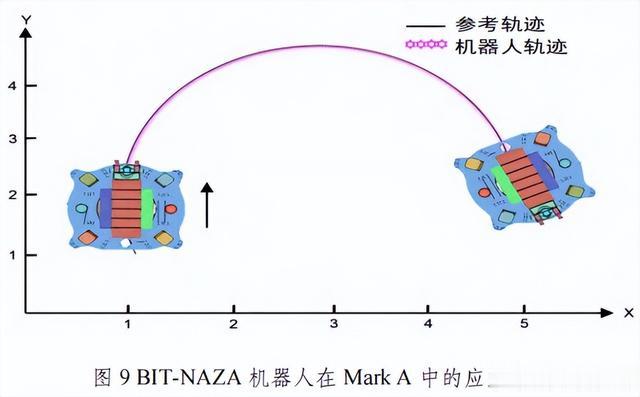
有横向位置、纵向位置和偏航角的比较结果如图10所示,可以看出,MPC和NFMPC方法基本上可以与期望轨迹重叠。

然而,从局部放大图可以看出,NFMPC方案在x轴、y轴和偏航角方面的控制精度均高于MPC方案。因此,在动态干扰的情况下,神经模糊逼近在反馈系统中的性能更好。
从图11可以得出位置误差的结论。经典MPC方法的性能随着未知扰动的增加而逐渐提高,同时,在误差变化不断减小的情况下,NMPC方法能有效地约束横向位置、纵向位置和偏航角。
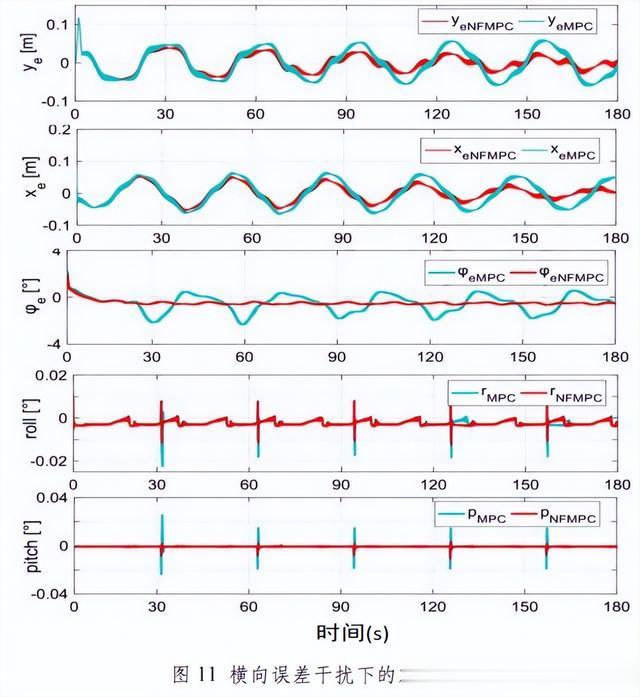
同时,MPC方法在跟踪过程中存在一定的延迟和波动,NFMPC方法可以逐步减小误差,跟踪曲线平滑。NFMPC进近的横向误差基本限制在±0.01米,但MPC误差为±0.06米。
NFMPC方法的纵向误差约为±0.02米,而MPC方法的纵向误差为±0.08米。另一方面,从滚转角和俯仰角的角度,可以推断本文方法NFMPC比MPC更能保持机器人系统在合理的范围内。因此,本文方法的跟踪精度和鲁棒性更好。
«——【·结语·】——»
为了同时保证轮腿机器人的轨迹跟踪精度和重载稳定运行,本文提出了一种基于模糊逼近的轮腿机器人模型预测跟踪控制方法。最后轮腿机器人平台实验证明了如下结论:
提出的方法能在重载和复杂环境下正常工作,在物资运输、应急救援、无人作战平台等实际工程中具有重要意义。

在动态干扰的情况下,神经模糊逼近在反馈系统中的性能更好。
提出的轮腿机器人模型预测跟踪控制精度高、鲁棒性强。
