大家好!今天来了解一种新型的亚毫米级纤维机器人——《Submillimeter fiber robots capable of decoupled macro-micro motion for endoluminal manipulation》发表于《SCIENCE ADVANCES》。传统机器人在这方面存在不少局限,而现在有了亚毫米级纤维机器人!不仅能在狭窄曲折的体内环境自由穿梭,还实现了宏观和微观运动的解耦,为早期干预和精准手术带来了全新的可能,让我们一起深入了解它的奇妙之处吧!
*本文只做阅读笔记分享*
一、研究背景
随着医疗机器人技术的快速发展,连续体机器人在腔内诊断和干预方面备受关注。然而,传统连续体机器人在面对血管、肠道等狭窄、曲折且脆弱的体内腔道时,面临着诸多挑战。比如,传统的机械电缆驱动或其他驱动方式(如磁驱动、液压驱动、光学驱动、形状记忆合金/聚合物驱动)的机器人,虽各有优势,但往往只能实现毫米级精度的宏观运动,难以完成微观手术任务。同时,现有的精密制造和微驱动方案,如基于微机械结构或智能材料的机器人,虽能实现微观操作,但操作空间小,无法满足临床对腔内干预既要快速宏观运动到达目标位点,又要精确微观运动进行局部操作的需求。为克服这些挑战,本文作者提出了一种宏-微解耦、光纤驱动的亚毫米级连续体机器人。
二、纤维机器人设计与原理
(一)整体结构设计
该纤维机器人具有独特的结构,如[图1]所示,它采用串行-并行配置,由宏观肌腱驱动连续体机器人(TDCR)和微观光驱动并联机器人(LDPR)组成。相同的光纤用于宏观和微观运动的机械和光驱动。其中,三个独立的LCE纤维(外径约300μm)组装成一个三自由度的LDPR,三根内置光纤(外径约125μm)为LCE纤维提供光刺激。宏观TDCR的外径约为1mm,其主体由热拉伸多腔苯乙烯-乙烯-丁烯-苯乙烯(SEBS)作为基底提供肌腱通道,飞秒激光成型的聚酰亚胺作为骨架。

(二)光驱动LDPR原理
1、LCE材料特性与驱动机制
LCE是一种交联液晶聚合物网络,对光和热等外部刺激有响应,能在给定复合结构中产生大变形。其聚合物骨架构象与液晶基元取向直接相关。液晶基元取向变化可诱导从向列相到各向同性相的宏观变形,常用的光敏基团偶氮苯可通过光诱导可逆光化学顺反异构化来改变液晶基元的取向。偶氮苯在约488nm处有最大吸收波长。通过将光纤发出的光导入空心LCE纤维,可使LCE纤维内的基元重新取向,从而沿LCE轴收缩,控制光强就能实现可编程收缩。

2、LCE纤维制备与性能测试
LCE纤维采用两阶段反应法制备。
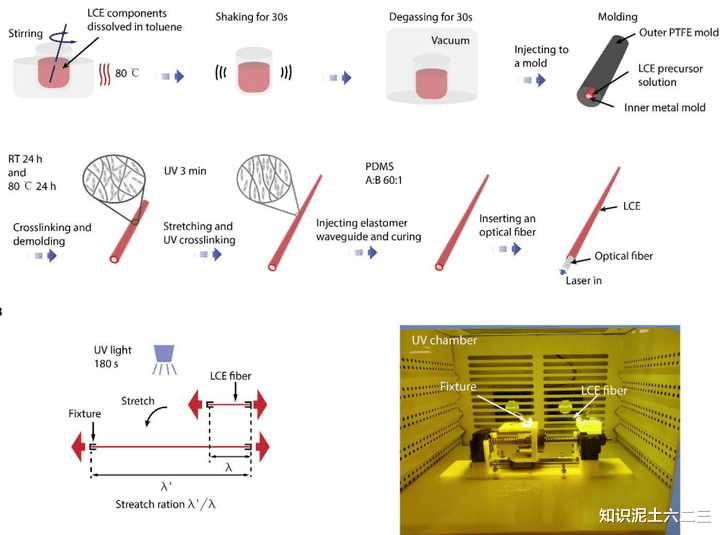
第一阶段通过硫醇-迈克尔加成反应生成多畴LCE,第二阶段固定畴。制备过程中,对不同拉伸比的LCE纤维进行了研究,第一阶段交联后的LCE纤维在拉伸测试中,应变达到约300%时力逐渐增加,这与基元重新取向和聚合物链延伸有关。

之后对拉伸比超过3的多畴LCE纤维在第二阶段交联时进行三到五倍的拉伸,形成单畴LCE纤维(直径300-400μm),并测试其在不同光强下的收缩性能。如[图2E、F]所示,LCE纤维的收缩长度随光强和拉伸比单调增加。通过动态热机械分析(DMA)评估LCE纤维的力性能,发现较高的刺激强度和更大的单畴取向会导致更高的收缩应变率。

综合考虑收缩应变率和尺寸要求,最终选择拉伸比为5(纤维直径约300μm)进行后续LCE纤维制备。单根LCE纤维可提起自身重量500倍以上的负载。此外,通过控制光开关的占空比可调节LCE纤维的收缩应变率,实验表明LCE纤维对光信号响应迅速,约2s达到总位移的80%,约6s达到平衡状态,且在300次循环内无明显疲劳,热效应影响较小。

3、LDPR运动性能
微LDPR由三根LCE纤维作为可驱动线性连杆,纤维两端固定在上下平台,其收缩可实现上平台的三自由度运动。

通过建立运动学模型和控制图,对微LDPR的运动进行模拟和控制。

从运动学模型得出的执行器工作空间。

实验中,设计了多种微图案,通过开环控制LDPR,其重复轨迹在五个循环内表现出良好的重复性,平均误差为4.8%。微LDPR还能在3D打印的微迷宫模具(最小路径宽度约60μm)中进行远程操作,展示了其高精度的精细操作能力。

(三)光纤驱动TDCR原理
1、热拉伸与激光切割技术
宏观TDCR的制造采用热拉伸和飞秒激光切割技术。热拉伸过程将四通道的SEBS预制棒(外径30mm)缩径约30倍制成外径约1mm的纤维,同时保持横截面结构。

在制造预制棒时,将SEBS颗粒热压成具有四个通道的预制棒,并研究了SEBS在不同温度下的流变特性,为热拉伸过程提供参考。

飞秒激光将外径1mm、壁厚0.03mm的聚酰亚胺管切割成蛇形骨架,以增强宏观TDCR的刚度。

2、TDCR的组装与运动性能
在组装宏观TDCR时,将热拉伸的SEBS纤维插入激光切割的聚酰亚胺骨架并粘合,然后将光纤穿过TDCR通道并粘结在机器人远端,与电机相连作为肌腱驱动TDCR。宏观机器人(长度10mm)具有较大的工作空间。

对其弯曲性能进行量化测试,发现存在滞后现象,主要通过远程操作方式控制TDCR。

(四)宏-微运动解耦特性
该纤维机器人的一个关键优势是宏-微运动的解耦。微LDPR和宏观TDCR集成后,光纤的拉/推与激光的光传输可同时进行,实现跨尺度操作。为验证解耦特性,采用了专门设计的ArUco标记基准系统。将2mm×2mm、精度1μm的ArUco标记附着在宏观TDCR基部,在光驱动微机器人工作时,用高分辨率相机识别标记,记录宏观TDCR的扰动。

实验结果表明,宏观TDCR在X和Y方向的位置变化小于0.005mm,Z方向小于0.02mm,标记方向变化小于0.015、0.015和0.005rad。在宏观TDCR运动时,记录其末端标记与微LDPR尖端针的角度,未发现明显变化,证明宏-微运动之间的串扰可忽略不计。

(五)活体动物实验
在活体豚鼠实验中,将光纤机器人(外径约1.0mm)和微型相机(外径约0.9mm)组装在3D打印的刚性杆(外径约2.7mm)上,插入豚鼠外耳道。在微型相机引导下,光纤机器人成功导航至鼓膜目标位置,80μm直径的微针可按不同图案(线性和圆形)穿透鼓膜,验证了该机器人在体内复杂环境中的有效性和精确性。

三、研究结论与展望
(一)研究结论
该亚毫米级纤维机器人成功解决了传统连续体机器人在腔内操作中面临的尺寸、运动范围和驱动串扰等问题。通过独特的设计,实现了宏-微解耦操作,在宏观运动和微观操作上均表现出优异性能,为腔内和腔道内干预提供了一种有效的解决方案。
(二)展望未来
尽管该机器人已取得显著成果,但仍处于发展初期。未来可从以下几个方面进一步改进:一是实现闭环控制,如利用视觉/医学图像反馈或机载传感器(如碳纳米管基电阻传感器)来提高机器人的准确性;二是改进机器人结构,如采用两段式宏观连续体机器人和Stewart结构微并联机器人,增加自由度,提升导航和定位能力;三是优化热管理,采用主动冷却系统或隔热外壳,防止热效应带来的副作用;此外,探索其他功能材料或驱动机制也有望推动该系统的进一步发展,拓展其在临床应用中的更多可能性。
四、一起来做做题吧
1、传统连续体机器人在进行腔内操作时面临的主要问题不包括以下哪一项?
运动范围与精度的权衡问题
驱动串扰问题
无法在狭窄曲折环境中导航
容易造成较大的组织损伤
2、亚毫米级纤维机器人中,光驱动 LDPR 实现微观运动的关键因素是什么?
光纤的机械拉伸
LCE 纤维对光的响应导致收缩
热塑性 SEBS 的变形
飞秒激光对聚酰亚胺骨架的切割
3、未来提升纤维机器人性能的措施不包括以下哪一项?
采用闭环控制方式
增加机器人的整体尺寸
改进机器人结构以获取更多自由度
探索新的功能材料或驱动机制
参考文献:
Cheng Zhou et al. Submillimeter fiber robots capable of decoupled macro-micro motion for endoluminal manipulation. Sci. Adv. 10, eadr6428(2024).
