新能源车发展到今天,自动驾驶技术作为颠覆性创新,已成为全球汽车制造商的战略重点,随着众多科技巨头的加入,竞争愈发激烈,谁能在高阶智能驾驶技术中脱颖而出,谁就能赢得消费者,赢得市场。

不过,当前的智驾方案主要分为两大类:以特斯拉为代表的纯视觉技术方案,与以大多数厂商为代表的激光雷达融合方案。
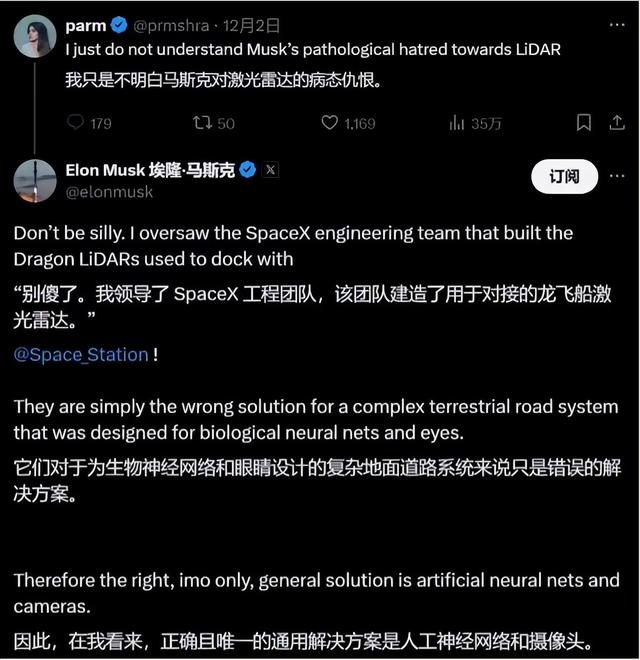
作为纯视觉方案的坚定支持者,马斯克多次批评激光雷达,甚至称“只有傻子才会用激光雷达”。就在不久前马斯克在社交平台上又重申了他对激光雷达技术的批评,称其为“错误的解决方案”。
而华为余承东则表示:坚持用激光雷达。
“只用摄像头,摄像头致盲就完蛋了,尤其在雨天大雾天,摄像头不好用。”

两种方案有什么不同?谁才是智驾的未来?讨论这个问题之前,我们先来了解一下两种方案的本质。
什么是纯视觉与激光雷达?
顾名思义,纯视觉方案就是模拟人的眼睛,利用车载摄像头捕捉多角度、多光谱的图像数据,通过深度学习算法对图像数据进行解析和理解,进而实现对道路、车辆、行人以及交通标志等目标的识别和追踪。

纯视觉方案通常采用多摄像头配置,以实现对车辆周围环境的全方位感知。前视摄像头主要用于识别车道线、交通标志以及前方车辆,侧视摄像头用于监测盲区和换道辅助,后视摄像头则提供泊车辅助和后方监控。

而激光雷达是一种通过发射激光并接收反射光来测量物体与传感器之间距离的技术。其基本工作原理是发射一个短脉冲的激光束,这些激光束在遇到物体表面时会反射回来,传感器通过检测激光发射和反射的时间差,从而计算出物体与激光雷达之间的距离。通过对多个反射点的距离测量,激光雷达能够生成一个三维的点云图像,精确描绘出周围环境的几何形状和物体分布。

他们分别的优缺点
纯视觉方案的硬件成本相对较低,这使得车企可以将更多的资源投入到软件算法开发、数据处理优化等方面。
纯视觉方案的另一个优势在于其升级和更新的灵活性。由于纯视觉方案是轻硬件而重AI,只要AI程序一直在升级,那么整个视觉智驾系统就能保持更新紧贴前沿科技。由此带来的最大优势就是智驾系统能越来越像人类老司机,能自主理性决策,更人性化。

当然,纯视觉方案也面临一些挑战。首先,就是受光照条件影响较大,在极端天气条件下(如大雾、大雨或积雪环境)的表现可能不如激光雷达。其次,纯视觉方案需要处理大量的图像数据,这对自动驾驶系统的数据处理和存储能力提出了更高的要求,增加了系统的复杂性和能耗。
激光雷达最大的优势在于其测距精度非常高,通常可以达到厘米级别,远高于传统的雷达和摄像头技术。通过高密度的点云数据,激光雷达能够精确感知周围环境中的物体位置、形状和距离,为自动驾驶系统提供精确的环境感知。激光雷达不依赖环境光照条件,能够在白天、夜晚以及光线复杂的环境中工作,这使得激光雷达特别适用于多变的户外环境,如城市街道、隧道和夜间驾驶等场景。
不过,激光雷达的高制造成本是其大规模应用的一大障碍。高精度激光发射器和探测器的生产成本昂贵,尤其是调频连续波激光雷达,因其技术复杂,制造成本更高。此外,激光雷达系统的维护和校准也需要额外的成本投入,这进一步增加了整车的成本压力。

有些同学可能会说了:那把两者融合一下不就行了?这也是国内厂商目前采用的方案。
通过将激光雷达、摄像头、毫米波雷达等多种传感器的感知数据进行综合处理,能够提供更为准确、完整的环境信息。这种融合感知技术能够充分利用各种传感器的优势,弥补彼此的不足,从而提高自动驾驶系统的安全性和可靠性。
不过,融合感知技术的推广仍面临成本、技术和法规等多方面的挑战。首先,融合感知技术需要集成多种传感器,这增加了系统的复杂性和成本。其次,不同传感器之间的数据融合需要高精度的校准和同步,这对技术实现提出了很高的要求,当然,最重要的就是成本真的很高。
综上所述,激光雷达和纯视觉方案在自动驾驶技术中各有优缺点。激光雷达以其高精度和不受光照条件影响的特点,在复杂环境和极端天气条件下表现出色;而纯视觉方案则以其低成本和灵活性,在大部分时间和场景下具有优势。
而在当下,两者相结合或许是最稳妥的解决方案,激光雷达可能不是必需品,但无疑是安全措施中的关键组成部分。因此,在中高端车型上将会持续存在并发挥重要作用。
声明:文字及图片来源于重庆日报,版权归原作者所有,如认为内容侵权,请联系我们删除。
