
文|大核有料
编辑|大核有料
我国是世界第一渔业养殖大国,目前正着力建设以生态健康养殖为主的现代设施渔业,对渔业养殖监测装备的机械化、自动化、智能化提出了更高的要求。
目前,渔业养殖监测通常包括两种方式,即定点监测和移动监测。

定点监测是将水质传感器固定于监测站点或网箱上;移动监测是将水质传感器搭载于遥控式水下机器人(Remotelyoperatedvehicle,ROV)、浮标或无人船上,但ROV受作业缆绳长度的限制使得作业范围有限,浮标搭载式监测仅能观测一定范围内的目标信息,无人船拖曳监测难以实现不同深度水域的精准立体定点监测。

自主水下机器人(Autonomousunderwatervehicle,AUV)具有作业范围广、自主性高、机动性好等优点,在大范围移动监测领域具有较大应用前景,近年来,随着AUV研究与应用日益成熟,国内外用于浅水域渔业监测的AUV取得了一定的进展。
但传统AUV运行通常是依靠其携带的自主导航系统、控制系统和推进系统等来实现,具有结构复杂、造价昂贵、体积大、耗能高等特点,制约其在渔业养殖领域中的广泛应用。

减少航行阻力,提高续航能力是渔业监测AUV的重要性能指标之一。
AUV在水下航行时的阻力主要包括摩擦阻力及压差阻力,其中压差阻力为主要因素,其与AUV外形结构密切相关。
在结合渔业养殖的低成本、低能耗、立体移动和定点监测需求后,本文提出并设计一种三体模块化结构的渔业监测AUV,进而开展三体结构及其连接框架的水动力性能分析与外形优化设计。
«——【·渔业监测AUV的三体模块化结构设计·】——»
水产动物对食物的需求不同,栖息活动主要分布在水体中下层,越接近水底,水产动物密度越大,大多数水产动物喜欢群居且喜欢安静。
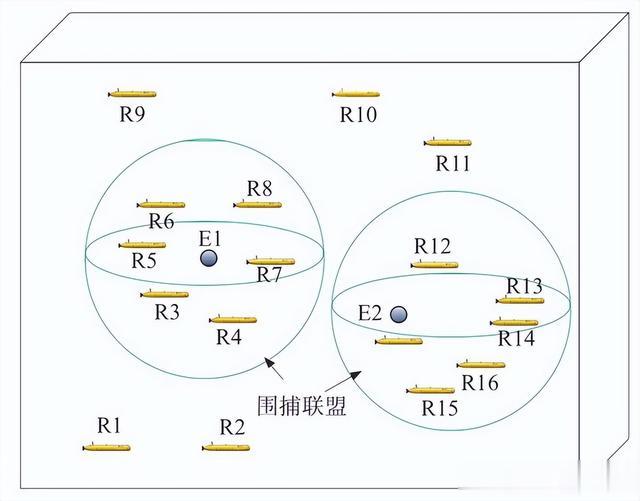
考虑水产动物的分布特点和生活习性及满足全水域监测需求,渔业监测AUV分别设有定点作业模式和运动作业模式,如图1所示。
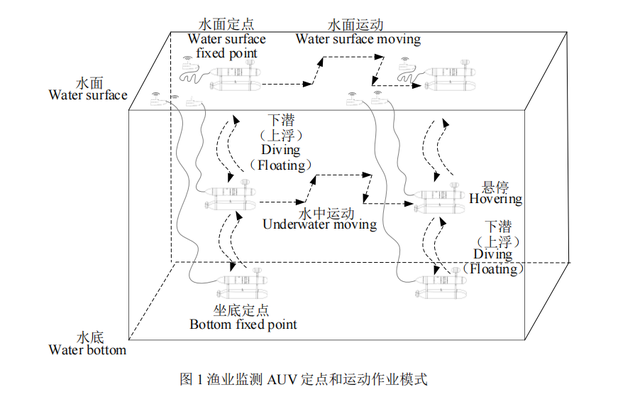
AUV常用多推进器组合实现悬停来进行定点作业,但推进器产生较大的噪声,容易引起水产动物应激反应,影响其生长。
同时,AUV靠自身携带的电池供电,推进器持续工作消耗能大,难以满足长期作业需求。
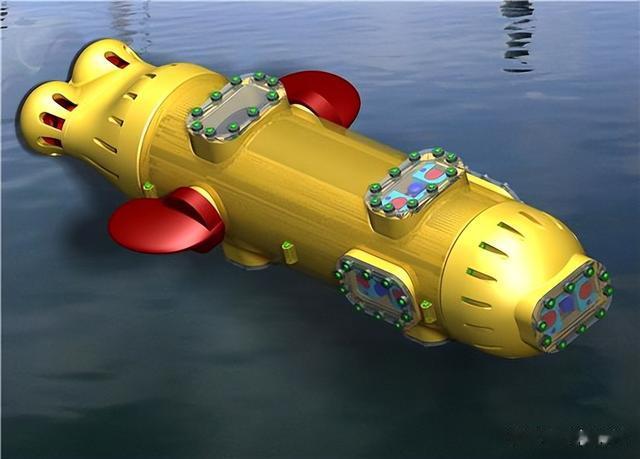
为了保证在水底安静地定点观测生物的生长状况和对环境的监测,提出并设计一种易于稳定坐底的三体结构渔业监测AUV,即AUV由三个回转体形的舱体构成“品”字形结构,即一个上舱体和两个下舱体,如图2所示。
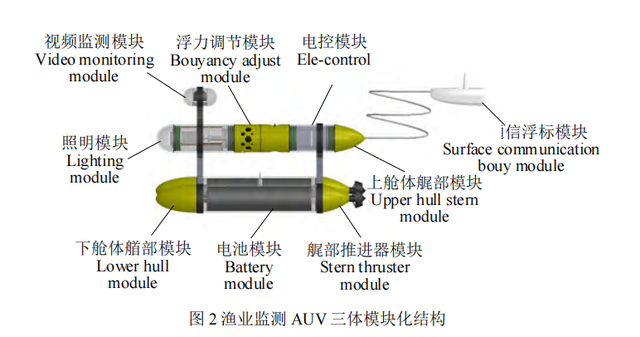
考虑整体结构的稳定性、搭载监测仪器装置的空间需求,及兼顾坐底定点监测所搭载摄像头高度等,三个舱体呈正三角形分布。
另外,为了便于灵活搭载不同的传感器,及组装拆卸、升级和维护方便,渔业监测AUV的三个舱体均采用模块化结构设计。
渔业监测AUV的上舱体主要负责水面、水中和坐底观测、电控与通信、浮力调节等,由水面通信浮标模块、视频监测模块、照明模块、浮力调节模块、电控模块和上舱体艉部模块组成。
传统的AUV大多采用水下惯性导航系统和水声通信进行导航定位和通信,成本高,传输速率低。
为此,本渔业监测AUV设计了一种内置4G、LoRa和GNSS天线的低成本水面通信浮标模块,实现AUV定位导航及与岸基实时通信等功能。
为了减少推进器对渔业环境的影响和降低能耗,浮力调节模块主要是通过控制外置油囊注油调节排水体积,实现无动力下潜上浮垂直运动。

另外,浮力调节模块还包括一个辅助垂直推进器,当油囊浮力调节机构产生的浮力不足以克服水底黏土的吸附力或浮力调节机构出现故障时,提供额外上浮动力。
为了保证渔业监测AUV正常工作和安全作业,通过压载重量及其分布的衡重设计,保证AUV在水中呈水平姿态,且浮心和重心之间垂直距离大,上轻下重,即保证足够的稳心高度,以保持AUV航行姿态平稳。
为此,渔业监测AUV设计两个相同的下舱体,并将沉重的电池布放在下舱体。另外,下舱体还包括艏部模块和艉部推进器模块。
«——【·三体结构AUV水动力分析及设计·】——»
三体结构AUV水下航行过程中,阻力的影响因素较为复杂。
不同于单体结构AUV,三体结构AUV的阻力分析,不仅需要研究舱体的外形,还需要研究各舱体间流场扰动影响所产生的航行阻力,进而设计合适的舱体间距;
另外,三体结构AUV为保持结构稳定性,需要通过连接支架进行固定连接。
不同结构的连接支架会对AUV的水动力性能产生影响,设计易于搭载仪器装置和低阻力的连接支架很重要。
舱体间距水动力分析:采用CFD进行数值模拟时,复杂的模型结构使得网格数量和计算资源需求增加,从而影响网格质量和计算结果的精度。
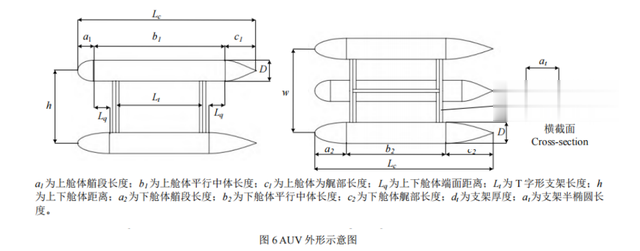
为此,在研究舱体间距水动力分析时,忽略水面通信浮标模块、连接支架、搭载传感器等次要附体,对三体结构AUV三维模型进行简化,只保留三个舱体的回转体形外壳,其中外壳包括艏段,平行中体和艉段,外壳形体为常用的Myring型回转体。
由于三个舱体左右对称,为减少计算量,取一半模型建立半径为1.5Lc的圆柱体计算域,其中Lc为舱体整体纵向长度,如图3a所示。
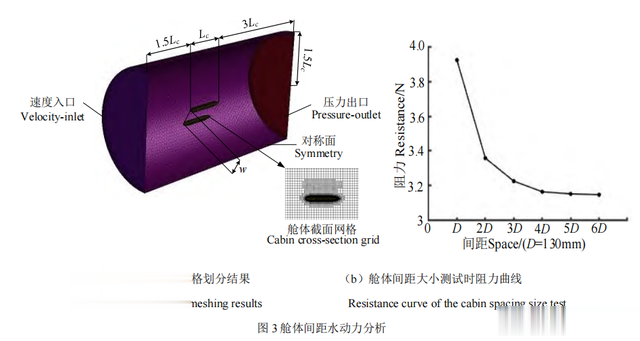
为提高数值计算的精度和效率,对计算域和网格划分进行了无关性验证,设舱体的艏部距离流场速度入口为1.5Lc,舱体艉部距离流场压力出口为3Lc。
网格划分采用具有适应性强且网格数量少的六面体核心网格,并对舱体局部加密处理。
考虑舱体特征尺寸较小,航速较低,属于低雷诺数流动,因此利用雷诺时均(Reynolds-averagednavierstokes,RANS)方程进行数值求解,并选择k-wSST湍流模型。
由于舱体间呈正三角形,间距相等。以间距w为自变量,控制其余变量不变,分析不同间距对直航阻力F的影响。

为了提高计算效率,将w进行参数化设置,利用Isight实现舱体间距的变更、网格划分、数值模拟和数据读取,同时确保计算结果的一致性。
考虑到本AUV在水下主要进行水平直航运动,则计算中攻角设为0,考虑到实际监测中对航速的需求,航速设为1m/s,直航阻力F计算结果如图3b所示。
由图3b可见,舱体间距越近,直航阻力F数值越大,表明舱体间水动力扰动越强,即舱体间距对三体结构AUV的水动力影响较大。
当w=4D和w=5D时,直航阻力F曲线变化较为缓慢,可忽略舱体之间干扰,其中D为舱体直径,本AUV的三个舱体直径均相同,为130mm。
在满足支架上搭载相关传感器设备以及对监测高度的需求情况下,w取为520mm(4D)。

连接支架结构设计与水动力分析传统的三体结构AUV连接方式,即连接支架形状大多采用三角形支架,其抗风浪性能较好,但安装拆卸较麻烦,不利于升级维护。
考虑池塘渔业养殖环境风浪较小,对抗风浪性能要求较低,且三个舱体采用模块化设计,即需要组装拆卸,升级和维护方便,为此,提出并设计一种结构简单的T形连接支架。
为了分析连接支架的水动力性能,将T形支架与三角形支架对比。按照上文设计,舱体间距一定的情况下,支架连接在相同位置且横截面形状都为水动力性能较好的椭圆形,建立对应的简易模型,计算两种连接支架在航速分别为0.25m/s、0.5m/s、0.75m/s和1m/s时的直航阻力F。
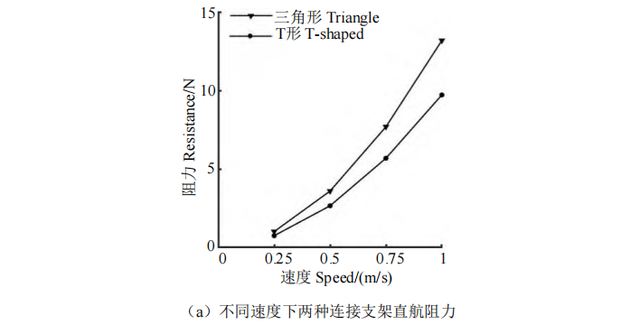
两种连接支架模型在不同航速下的直航阻力值如图4a所示,航速为1m/s时两种模型的压力云图,如图4b所示。
由图4a可见,三角形连接支架的直航阻力明显大于T形连接支架的,当航速为1m/s时,通过T形支架连接的AUV直航阻力相比于三角形支架连接的AUV降低了26.28%,可见T形支架连接水动力性能较好。
另外,由图4b可见,除了舱体的艏艉部对直航阻力影响较大外,连接支架迎流面受压也明显,为了减小AUV的直航阻力,需进一步对AUV的外壳形状和连接支架进行优化设计。
由前述分析与设计,通过结构设计、电控系统设计、各模块组装和系统联调等,研制的渔业监测AUV样机,如图5所示。

«——【·AUV外形优化设计与分析·】——»
以渔业监测AUV直航阻力F最小为优化目标,采用参数化建模方法,在Isight上通过试验设计生成多组样本点来构造近似模型,进而使用全局优化算法基于近似模型对AUV的外形进行优化设计。
参数化建模:本文渔业监测三体结构AUV相比于单体AUV,外形难以由明确的公式直接表达,考虑优化设计时需要计算不同参数下外形的直航阻力,普通建模方式需要反复建模,计算效率低。
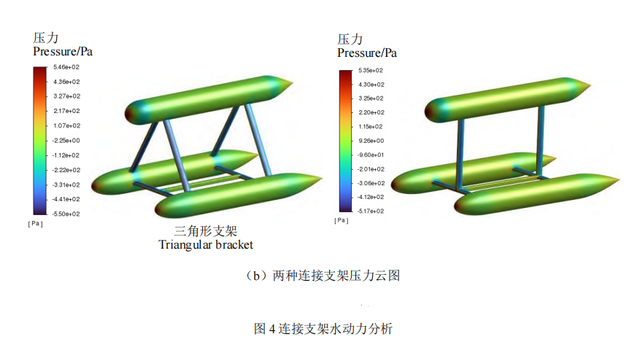
因此,为提高计算效率,对渔业监测AUV进行参数化建模。渔业监测AUV的外形主要包括三个回转体舱体和T字形连接支架,如图6所示。
渔业监测AUV舱体选用Myring型回转体,Myring型回转体包括艏部、平行中体和艉部三段曲线,其曲线方程表达式为:
艏部曲线方程:

平行中体方程:

艉部曲线方程:

式中:x为长轴上点到艏部顶点的距离;a为艏段长度;b为平行中体长度;c为艉部长度;d为平行中体直径;n为艏部锐度因子;θ为艉部离去角;L为舱体总长。
T形支架迎流面由其横截面椭圆曲线方程控制,椭圆曲线方程表达式为

式中:tn为支架截面椭圆锐度因子。
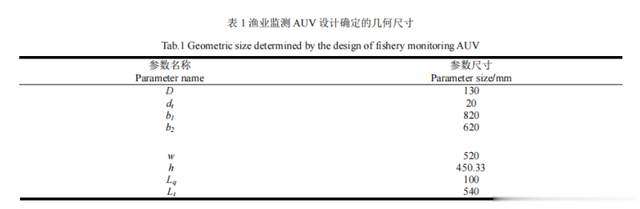
考虑渔业监测AUV各模块的结构和所需搭载器件和仪器对内部空间的要求因素,本文渔业监测AUV首先设计并确定的几何尺寸如下表1所示。
同时由图6可见,2a和2c可表示为

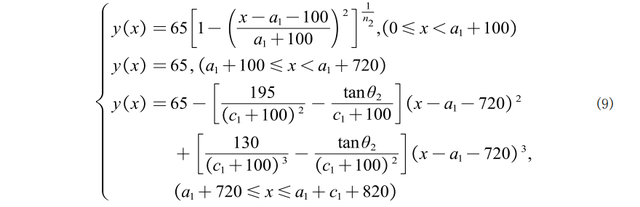
结合公式(1)~(6)和表1参数,得到AUV的外形曲线表达式为
上舱体:
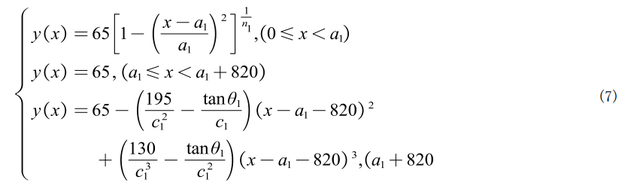
T字形支架:

下舱体:
根据AUV的曲线方程组公式(6)~(8),取设计变量为a1、c1、n1、θ1、n2、θ2、at和nt。
在表1参数的基础上,考虑AUV具有合适的长径比,及兼顾T形支架连接位置等,给出设计变量可行域范围,如表2所示。

在Solidworks中设置设计变量为全局变量参数,以渔业监测AUV外形曲线方程为驱动方程组,并在拟合曲线上建立图形约束,完成参数化模型的建立,即由全局变量参数值直接控制模型的变化。
试验设计与近似模型:为保证近似模型的拟合精度以及提高计算效率,需要安排合理的试验设计方法。

理论上试验设计生成的样本点越多精度会越高,但样本点数量过大,计算量激增导致优化流程时间的过长。
考虑最优拉丁超立方设计(Optimallatinhypercubedesign,OLHD)生成的样本点在设计空间内具有更好的均衡性和填充性,能够使所有样本点均匀覆盖可行域范围内。
本文采用OLHD生成80组试验设计样本点,计算航速为1m/s时的直航阻力值。
为减小计算量并且缩短计算周期,采用二阶多项式响应面模型(Responsesurfacemodel,RSM)构造近似模型,二阶多项式响应面模型数学表达式为:

式中:m0、ei、fii、gij分别为常数项、一次项、二次项和交叉项的待定系数,xi为设计变量,k为设计变量的个数。
利用二阶多项式回归技术对OLHD得到的80组样本点和响应阻力进行最小二乘拟合得到二阶多项式拟合模型,拟合曲线系数如表3所示。
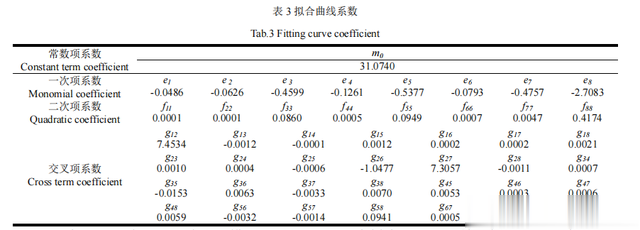
由生成的二阶多项式响应面模型,重新选取20个样本点进行误差分析,得到阻力的复相关系数R2为0.96248,大于工程要求0.9,可以用于后续优化设计。
优化与分析:自适应模拟退火算法(Adaptivesecurityalgorithm,ASA)具有良好的全局搜索能力,计算效率高,广泛应用于工程领域。
本文利用ASA对生成的二阶响应面近似模型进行全局优化,以获得阻力最小的AUV外形,其目标函数可表示为

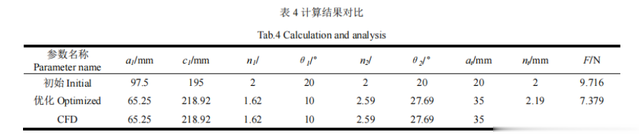
在Isight中采用ASA,设定初温为1,最大迭代次数为10000,当迭代到6460步时得到优化结果Fmin=7.379N,相比初始值计算得到的阻力,阻力降低了24.05%。
为了验证优化结果的准确性,将优化结果中的数据重新进行CFD仿真分析,验证结果如表4所示,近似模型寻优结果与CFD仿真结果相差0.75%,误差较小,优化结果可靠。
优化前后,渔业监测AUV的数值仿真结果如图7所示。
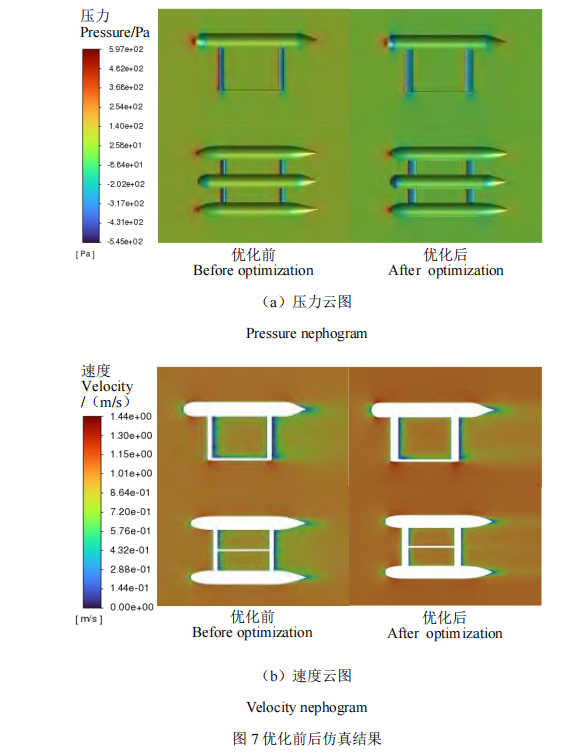
由图7a可见,优化前后AUV的压力分布总体未发生较大变化,高压区均集中在舱体的艏部前端、艉部后端和连接支架的迎流面;低压区均集中在舱体艏艉部的交界处和连接支架的迎流面与背流面的交界处。
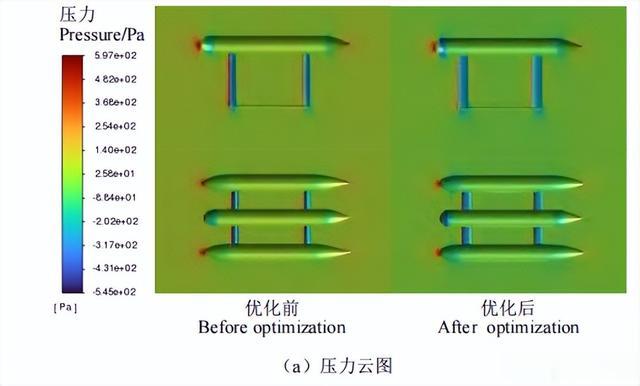
优化后压力值明显小于优化前,且连接支架迎流面高压区显著降低,低压区优化后的分布更均匀。
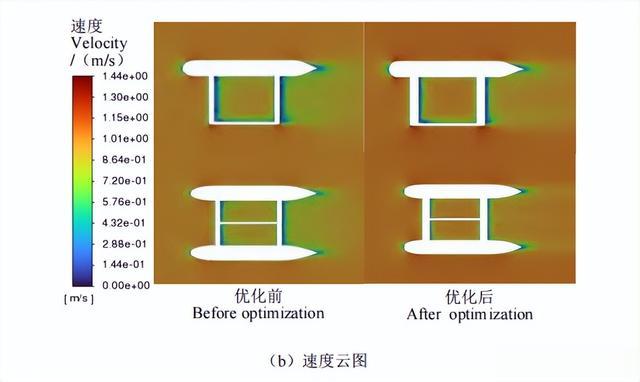
由图7b可见,优化前后AUV周围流场分布未发生明显改变,但优化后舱体艉部和连接支架背流面的流动情况有明显改善,有效避免流动分离带来的阻力增加,使AUV获得较好的流动性。
同时,优化仿真结果表明优化设计使AUV具有更好的水动力性能。
«——【·结语·】——»
结合渔业养殖监测领域的现状和需求,本文提出并设计研制了一台三体稳定结构的渔业监测AUV。
AUV设有定点和运动两种作业模式,同时采用模块化结构设计方法,设计各个功能模块,其中浮力调节模块和水面通信浮标模块降低了能耗和成本。

基于计算流体力学方法,分析了三体结构舱体间距的干扰作用,确定了舱体间距为520mm,进而针对渔业监测AUV的三体结构连接提出并设计了一种T形支架,通过与传统的三角形支架对比分析,T形支架直航阻力相比于三角形支架降低了26.28%,表明T形支架水动力性能更好。
为了进一步减小直航阻力,对AUV的三个舱体和T形支架进行了参数化建模,选取舱体艏部和艉部与T形支架的曲线方程参数为设计变量。
在Isight中采用OLHD生成样本点,并通过二阶多项式响应面模型和ASA得到了优化后的三个舱体的艏艉部和T形支架外形,使相同工况下阻力降低了24.05%,提高了AUV续航能力。
