DOI:10.3788/LOP222426
1 引言
自20世纪60年代激光问世后不久,激光就开始被用于测距领域。研究者们在微波雷达的基础上开发了激光雷达,利用发射的激光光束探测目标并从反射光中获得目标的位置、速度等特征信息。与传统的微波雷达相比,激光雷达具有更高的分辨率、更大的测量距离和更强的抗干扰能力,它的体积和质量较小,可靠性高,成本也相对较低。在过去的几十年里,激光雷达在气象观测、遥感测绘、三维成像和工业检测等诸多领域获得了广泛的应用。
近年来,随着消费者对汽车的安全性和功能多样性的重视,汽车智能化的发展越来越快,激光雷达开始成为自动驾驶汽车(AV)和高级驾驶辅助系统(ADAS)传感器系统的重要组成部分。通过以点云的形式收集周围的环境信息,它可以补充和交叉检验摄像头、毫米波雷达、超声波等传感器提供的信息,辅助车辆态势感知,保证安全冗余。据统计,仅在2022年上半年,国内乘用车新车的激光雷达安装量就达到了2.47万台,有预计称,用于汽车和工业应用的激光雷达市场规模将在2026年增长至57亿美元,而用于ADAS的激光雷达将在其中占据41%的份额。面对车载激光雷达,汽车行业在价格、体积、抗冲击振动和工作温度范围等方面的性能提出了繁多且严格的期待。
然而,目前市场上现有的大多数激光雷达系统的光束扫描模块主要基于机械结构,如电机驱动的旋转台、反射镜和棱镜等,这种方案使得雷达系统复杂、体积大、功耗大、成本高,还限制了扫描速率、降低了可靠性,其复杂的组装和校准过程也增加了时间和人工成本。因此,这种传统的机械式结构难以匹配量产车的搭载需求,研究人员开始积极开发以微机电系统(MEMS)为代表的半固态扫描方案或以面阵闪光(flash)和光学相控阵(OPA)为代表的全固态扫描方案,追求更加紧凑、稳定、耐用、快速和廉价的激光雷达系统。从行业趋势看,半固态激光雷达由于较高的集成度和较低的成本是短期乃至中期内的主流方案,但随着固态激光雷达技术的逐渐成熟,其在体积和稳定性等方面的优势将使其具备强大的竞争力。
实现全固态激光雷达系统的一条可行的途径是利用集成硅基光电子学。基于成熟互补金属氧化物半导体(CMOS)工艺的硅基光电子技术此前已经在通信领域获得了广泛的商业应用,其高折射率对比度允许大量的波导元件和集成电路组件同时紧凑地在一个微小的芯片内集成。应用硅基光电子技术可以很大程度减小光学信号处理模块的尺寸并降低功耗,提升系统的性能、集成度和可靠性,实现低成本芯片级激光雷达。
本文对硅基片上激光雷达的发展概况进行了综述。首先,介绍了几个激光雷达的基本概念。其次,介绍了常见激光雷达的测距原理。然后,介绍了常见硅基片上激光雷达系统的扫描方案。最后,对硅基片上激光雷达当前面临的挑战和发展方向进行了讨论。
2 激光雷达基本概念
2.1 激光波长
综合考虑大气窗口、人眼安全以及可选用的激光器和光电探测器,激光雷达使用的波长通常为0.8~1.55μm,对应使用的激光器和探测器类型如表1所示。由于车载激光雷达工作时可能面临的环境温度具有很大的变化范围,因此当系统中采用滤光片抑制背景光干扰时,激光器的输出波长在温度影响下发生变化时应始终保持在滤光片的通带内,这也是在选择光源时需要考虑的问题。

当前激光雷达的主流波长是905nm和1550nm。脉冲激光雷达采用905nm激光器,主要优点是可以采用较为便宜的硅基探测器,并且905nm相比1550nm亲水性较弱,光损失更小。但由于硅材料的透明窗口,它不能用在硅光子系统上。因为905nm激光可以穿透人眼玻璃体到达敏感的视网膜,为避免视网膜损伤,它的峰值功率受到限制。1550nm适用于长距离连续波激光雷达系统,由于光在人眼的前半部分被吸收,不会危害视网膜,激光出射功率可以更大。这一波长通常用于通信设备,具有丰富的技术储备,并且可以以低成本获得连续波激光源。
2.2 探测距离
探测距离指激光雷达能发现目标的最大距离,主要受到激光信号发射功率的制约。对于脉冲激光雷达,探测距离还与信号的重复周期T有关,因为只有当回波信号在时间T内返回接收系统时才可以解算出正确的目标距离信息,而超出这一时间段返回的回波信号则因为与后续回波无法区分而导致距离模糊。对于调频连续波(FMCW)激光雷达,探测距离也受到激光线宽Δν的影响。Δν越窄,激光信号的相干长度Lc就越长,而对于相干长度以外的目标,其回波信噪比会大大降低而难以被系统识别。此参数一般由激光雷达对于10%低反射率目标物的最远探测距离得到,实际应用中由于环境和目标表面情况的变化,数值并不是绝对的。
2.3 视场角
视场角(FOV)指激光雷达可以探测到的区域范围,单位通常以°表示。对于车载环境应用,激光雷达视场角必须包括水平视场角(HFOV)和垂直视场角(VFOV),视场角越大说明激光雷达对空间的角度覆盖范围越广,对周围环境的感知范围越大。
2.4 测量精度和测量分辨率
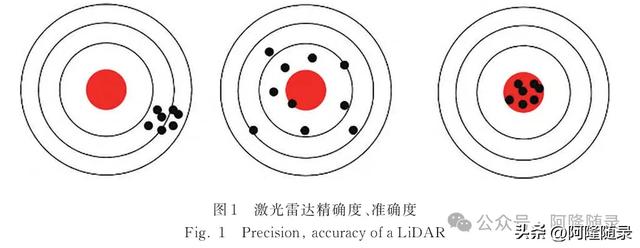
测量精度是精确度与准确度的结合。精确度指激光雷达在同一条件下多次测量得到的距离值的一致程度,而准确度指激光雷达测得的距离分布的均值与真实距离的接近程度,二者分别受测量过程中的随机误差和系统误差影响,如图1所示。其中,距离测量的准确度主要受光信号产生和测量系统影响,角度测量的准确度则主要受发射端激光转向扫描的准确性影响。测量分辨率具体包括距离分辨率和角分辨率。
距离分辨率指激光雷达单次测量中目标能被区分的最小距离。对于脉冲激光雷达,脉冲宽度越窄则距离分辨率越高;对于FMCW激光雷达,距离分辨率与调制带宽成反比,并受调频线性度影响。角分辨率指激光雷达单次测量中目标能被区分的最小角度,增加发射孔径是提高角分辨率的有效手段。
3 硅基片上激光雷达的测距原理
3.1 脉冲飞行时间法
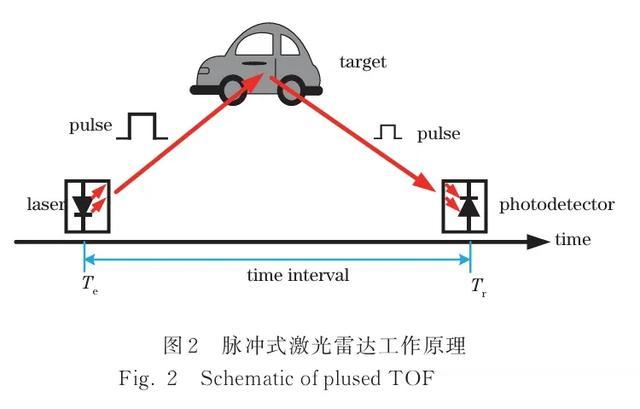
脉冲飞行时间法(TOF)采用直接探测方式,通过测量激光信号从发出经目标反射到被探测系统采集的时间实现目标距离的测量。脉冲激光雷达的测距原理和系统设计都比较简单,如图2所示:在定时器的触发下,激光器周期性地产生短促高频强脉冲,经目标反射后,回波信号输入接收机,经数据处理后获得返回时刻Tr,再根据信号出射时刻Te与光速c,即可获得目标与雷达系统的距离R:

根据测量原理可知,脉冲激光雷达的距离分辨率ΔR与时间计数分辨率Δt成正比,由于激光脉冲信号在传播过程中会发生畸变和展宽,需要高精度的时刻鉴别单元以确保返回时刻的准确性,因此对电子电路设计提出了很高的要求。当探测距离增大时,脉冲激光雷达的精度相对变高,因而更适用于远距离应用场景。
脉冲激光雷达存在模糊距离,因为回波信号相对于发射信号是否偏移一个或多个周期存在着不确定性。此外,由于发射机到接收机的链路上光脉冲能量存在散射损耗,因此信噪比也是限制脉冲激光雷达探测范围的主要因素。为了提高作用距离,需要增加脉冲发射功率,对于自动驾驶应用,需要考虑人眼安全功率极限。一种方法是使用脉冲串来降低单个脉冲所需的高功率,通过积分并平均接收的功率来提高信噪比和精度。尽管存在这些限制,脉冲激光雷达简单的探测原理和实现方式使其具有强大的竞争力。
3.2 调幅连续波测距法
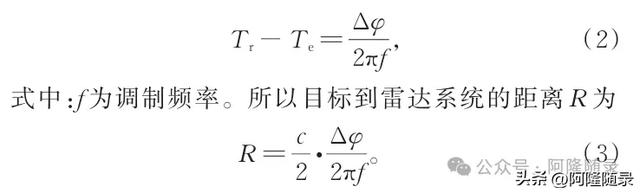
调幅连续波(AMCW)测距法也称间接飞行时间法。在调幅连续波激光雷达中,激光出射之前进行了幅度调制,调制周期大于往返飞行时间,对回波信号和出射信号进行比较,根据相位延迟量Δφ可计算出时间间隔为
对于调幅连续波测量方法,距离分辨率由测距信号频率和相位计分辨率共同决定,距离分辨率随着调幅信号频率增加而增加。与脉冲激光雷达一样,调幅连续波激光雷达的回波信号相位经过2π相移后开始重复,为避免多解问题,测距范围会相应减小。一种解决方法是选取一个调制频率高的调制光波作为基本测尺,再引入一个或多个调制频率较低的调制光波作为辅助测尺,综合每个测尺的测量结果以获得精确的测量值。
3.3 随机调制连续波测距法
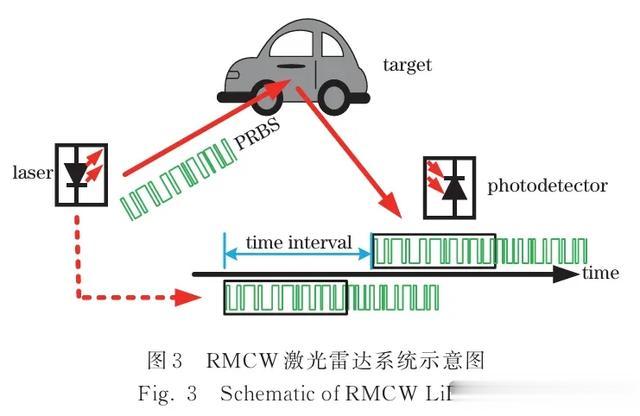
随机调制连续波(RMCW)测距法将伪随机比特序列(PRBS)调制到出射激光的幅度或相位上,通过使用匹配滤波器等方式计算接收到的返回激光信号与PRBS的原始模板之间的相关性来获得接收光的飞行时间,如图3所示。由于PRBS只与自身相关,因此RMCW激光雷达对阳光、灯光和其他激光雷达的光等不敏感。然而,此技术对相对速度、激光相位噪声和散斑具有敏感性,这是较大的技术挑战。在激光雷达应用领域,澳大利亚初创激光雷达公司Baraja是RMCW技术的典型代表,该公司采用RMCW技术结合独特的棱镜色散光谱扫描技术研制出型号为SpectrumHD的车载级雷达。
3.4 调频连续波激光测距法
FMCW激光雷达采用频率随时间周期性变化的调制信号进行探测,返回的光信号与本振光信号相干,根据混频产生的中频信号的频率可以测量目标物的距离,它的信号调制形式有三角波、锯齿波、正弦波等。其中,正弦波调制信号检测物体时需要调节信号频偏,因此大多应用于只有一个探测目标的情况,对于自动驾驶应用中对多个目标的探测需求,一般采用三角波或者锯齿波。三角波可以同时得到物体的距离和速度信息,锯齿波则主要用来测量物体的距离。假设拍频频率差为f,锯齿波探测得到的距离表达式为

对于三角波探测,当目标运动时,信号发生多普勒频移,反射信号和本振信号之间的频率差在线性调频的上升段和下降段具有不同的拍频频率,如图4所示,假设分别为f+if和fif,则目标的距离和速度分别为
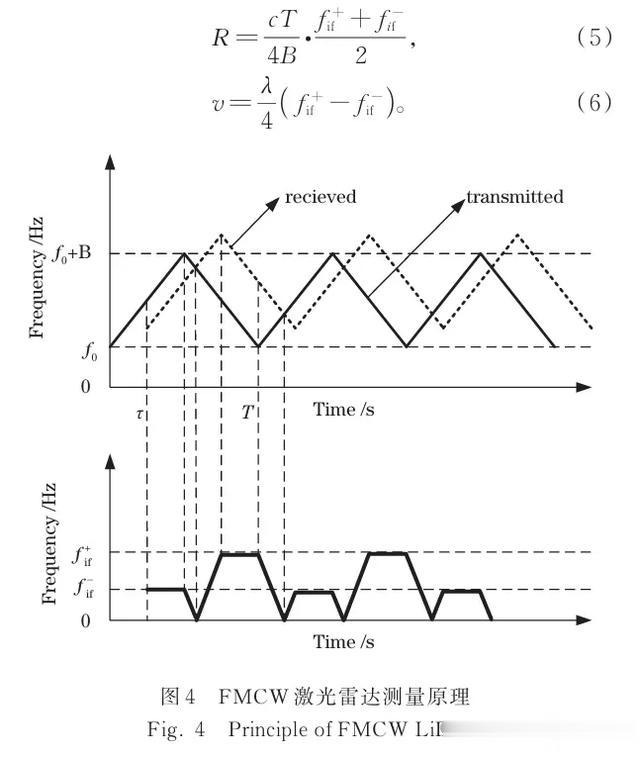
与脉冲测距法相比,FMCW测距具有许多优势。第一,它采用相干探测,不受阳光、城市人造光及附近的其他激光雷达系统的干扰,提高了信噪比。第二,它可以通过检测信号的多普勒频移来直接获取目标的运动速度。第三,它的探测精度取决于线性调频带宽和信噪比,可以通过相对低频的接收器电子设备实现,相比之下脉冲测距精度受到接收器带宽的限制。第四,它的检测灵敏度高,不需要很高的激光功率,因此也不会在波导中产生非线性效应,加上它不需要用到雪崩光电二极管(APD)和高速检测电路,所以适应激光雷达的硅基集成化发展。它的主要技术难点在于线性调频光信号的获取,解决方法有采用干涉仪、光频梳、微谐振器等校准扫频激光器,或者在外部级联光调制器等。
4 硅基片上激光雷达的扫描实现方式
4.1 面阵闪光激光雷达
flash脉冲激光雷达的工作模式类似于照相机,它基于TOF原理,系统发射具有高重复频率的脉冲光束,脉冲光束完全照亮整个视场。由于空间中存在目标物,探测器阵列中每个单元获取的光子具有不同的飞行时间,据此可以获得距离信息,实现三维成像。
荷兰代尔夫特理工大学演示了一种flash激光雷达。图5给出了该雷达系统使用的单光子雪崩二极管(SPAD)芯片,它采用0.18μmCMOS工艺制造,尺寸为21.6mm×10.2mm,具有252pixel×144pixel和1728个12位时间数字转换器(TDC),其上约70%的面积为部分直方图读出电路(PHR),作用是将原始数据处理为直方图数据输出,压缩输出的数据量。该系统可在30frame/s的帧率下实现0.7m距离处的成像,对50m处60%反射率的目标的测量误差不高于1.4mm。
芬兰奥卢大学提出的flash激光雷达系统采用了基于块的分段照明策略,如图6所示。发射器由位于焦平面上的16个共阳极的可单独寻址的激光二极管元件组成,当其中任意一个激光二极管元件被驱动时,视场内的相应部分被照亮。接收器芯片尺寸为6.6mm×5.5mm,由32×128个SPAD元件和1个257通道的TDC阵列构成。相比于大多数设计中采用的泛光照明策略,基于块的分割照明提高了检测的信噪比,减少了接收器中所需的TDC数量,使系统复杂程度降低。该系统能够以2.6mW的平均照明功率,在15m内以约30frame/s的帧率进行成像,FOV为40°×10°。
西安电子科技大学采用0.18μmHVCMOS工艺制造了2.9mm×2.9mm的flash脉冲激光雷达芯片。该芯片包括32pixel×32pixel和1024个TDC,每个pixel中包含4个SPAD、4个无源淬火电路(PQC)、4个脉冲压缩单稳态电路和噪声滤波电路,如图7所示。该团队利用基于此芯片的激光雷达系统成功演示了4.5m处的室内3D成像,在超过20m的室外测距实验中,相对测量误差不超过0.35%,如图8所示。
flash激光雷达的系统中没有运动部件,具有抗振动、体积小、价格低等优点。其点云是由单次激光脉冲生成的,而非逐点构建,因此可以解决时间同步问题。其缺点是需要较高的激光峰值功率以同时照亮大的空间区域,信噪比低,检测距离和视场有限,性能还会受到目标物反射率的影响。由于雷达的距离分辨力率和角分辨率直接受限于探测器阵列的规模和性能,而大规模阵列意味着大数据处理量,因此成像分辨率和成像速度之间需要进行平衡。此外,从目标表面反射的回波信号往往很弱,探测器往往需要采用昂贵的SPAD。
4.2 光学相控阵激光雷达
OPA中主要包括分光器、移相器和天线等3个部分。其中,移相器为光信号引入相位延迟,主要通过热光效应或电光效应实现,天线通常采用光栅耦合器、边缘耦合器或端射耦合器的形式。OPA通过控制光通过微波导的相位,从而控制波前的形状和方向,实现第60卷第16期/2023年8月/激光与光电子学进展光束偏转。
2017年麻省理工学院电子研究实验室首次在硅光子芯片上展示了采用三角波调制的FMCW激光雷达,如图9所示。光源来自片外紧凑型DFB激光二极管,通过调制注入电流来实现频率调制。光子电路使用193nm浸没式光刻技术在220nm厚的绝缘体上硅(SOI)晶片上制造,该晶片具有2μm的掩埋氧化物。芯片上有OPA用于发射和接收,其采用分组级联移相器架构进行简单控制,用于片上光束准直,信号的检测则由片上Ge平衡光电探测器承担。该系统成功实现了距离和速度的同时测量,并且对于2m范围内的目标物,系统的绝对误差小于10mm。
美国AnalogPhotonics公司展示了相干二维固态激光雷达原型系统,其中使用了两个大型OPA。实验中系统对房间内25m内的墙壁和沙发等漫反射目标进行了检测,并演示了如何通过多普勒频移对目标速度进行提取。该系统在室外测试中展现了对185m内的检测能力。此外,他们还首次展示了使用OPA实现的实时3D相干激光雷达系统,获取的图像如图10所示,其中,清晰地展示了7m外站立的人的手臂和腿部等特征。
三星电子于2020年展示了带有集成半导体光放大器(SOA)的32通道硅光子OPA。片外激光器产生的脉冲进入输入耦合器,通过改变移相器的驱动电压和片外激光器的波长使OPA水平和垂直扫描,回波脉冲由InGaAsAPD阵列接收,深度图像每帧包含40×21个点,每个点都有来自80个脉冲的平均数据,成像距离可达20m,距离测量范围则达到了40m。该公司还首次展示了不使用外部光源或放大器的芯片级激光雷达解决方案,如图11所示。他们采用III-Von-Si工艺将可调谐激光二极管、SOA和32通道的OPA集成在同1个7.5mm×3mm的单芯片上,脉冲激光波长为1.3μm,反射光脉冲由16pixel×5pixel的III-VAPD阵列检测,可以在20frame/s的扫描速度下实现10m内的深度成像,误差小于10cm,FOV为15°×3.5°,分辨率为120×20。
2021年,三星电子通过III-V-on-Si工艺将可调谐激光二极管、SOA和32通道的OPA集成在8.7mm×3mm单芯片上,如图12所示。对于每个转向角度,OPA芯片以1MHz的重复率传输17次持续时间为30ns的脉冲,反射脉冲由APD接收。在20m内,系统对一个反射率为60%的平板进行了测距,通过氙灯模拟太阳光发现,照度从350lx提升至104lx时系统信噪比仅下降0.3dB,证明了系统对O波段波长的抗干扰性能。
吉林大学在多层SiN-SOI平台上制造了分别具有鱼骨结构和链式结构的两个128通道OPA,其图像如图13所示。鱼骨式OPA的FOV为100°×19.4°,发散角为0.021°×0.029°,链式OPA的FOV为140°×19.23°,发散角为0.021°×0.1°。两个OPA均采用非均匀天线间距设计,可实现4mm宽的孔径,降低发散度。该团队基于鱼骨式OPA构建了采用三角波测距的FMCW激光雷达系统,以一块90%反射率的平板作为目标进行测距实验,实现了100m距离的测量,距离分辨率为5.09cm,测量绝对误差为3.38cm。
OPA结构紧凑,制造成本低,对于机械冲击和振动不敏感,因为没有运动部件而完全没有惯性,且任意时刻的扫描方向只由当前调用的相位查找表决定,与前一时刻的扫描方向无关,在高速扫描下可以实现具有高方向增益的随机指向。由于阵列中的所有光学天线需要进行精确的幅度和相位控制,扩大OPA的制造规模比较困难。目前大多数能做到宽视野的大规模OPA只是一维阵列,另一个方向的扫描通常通过调谐激光器的波长实现。此外OPA还面临着较高的光损耗、阵列串扰、热稳定性等挑战,它较低的片上光功率也会限制远距离探测。
从广义上来说,液晶超表面(LCM)技术也属于特殊的OPA,该技术使用液晶来调整超表面以创建可以快速更改的反射光栅改变衍射角,由于技术尚在发展中,所以信息量有限。
4.3 透镜辅助光束转向激光雷达
透镜辅助光束转向(LABS)技术具有类似相机的光学系统,包括片上开关/天线阵列和片上(或片外)透镜,阵列位置与透镜的焦平面重合,所以也可称为基于焦平面阵列(FPA)的光束转向技术。阵列中采用的开关通常为Mach-Zehnder(MZ)干涉仪开关、MEMS开关和环形谐振器开关。通过打开特定的开关,入射光被引导到相应的天线进行准直,经透镜出射发生规定的角度偏转,进入自由空间。在这一技术中,每次只有一个发射器发射一束光,通过将光束切换到不同的发射器来控制光束的发射角度,光束的扫描是离散的。
2020年上海交通大学演示了基于LABS的固态脉冲激光雷达。该激光雷达采用TOF测距原理,光束转向部分包括1个集成的具有16个通道的开关芯片、1个光纤阵列和1个透镜。光纤阵列将开关芯片的一维输出转换为二维,经过透镜准直后波束具有0.014°的发散角,转向步长为0.35°,FOV为1.05°×1.05°,如图14所示。演示实验中验证了19.5m的测距距离,测距误差小于3cm。该团队此后还在单个片上二维收发器阵列芯片上同时实现了光束发射、转向和接收,如图15(a)所示。图15(b)、(c)展示了收发器单元的具体结构,单元中间是一个光栅发射器,周围是U型Ge光电探测器,所以经一个单元出射的光直接被同一个单元接收。 该芯片共有4个收发器单元,具有87MHz的带宽和0.3A/W的响应度,检测灵敏度为−20dBm。配合1个1550nm脉冲激光源和1个片外透镜组成激光雷达系统,实现了5.2m内的目标检测,其扫描角度为2.86°,单次扫描时间为5.3μs。此外,该团队还基于该芯片在1m内进行了FMCW测距验证实验,测量误差小于0.01m。
美国加州大学伯克利分校开发出一种新型高分辨率芯片激光雷达,它采用基于MEMS工艺的128pixel×128pixel的焦平面开关阵列(FPSA),并将其集成在尺寸为10mm×11mm的硅光子芯片上,如图16所示,阵列中每个像素仅由光学天线和开关组成,FOV可以达到70°×70°,扫描角度的切换时间在微秒量级,输出光束的发散角为0.05°,分辨率为0.6°。他们基于此芯片构建了FMCW3D成像激光雷达,演示了对10m处反射目标的3D成像,距离分辨率为1.7cm,FOV为16°×16°。
2021年来自美国的PointcloudInc.和英国南安普敦大学光电研究中心的研究团队展示了基于FPA的全固态集成光子激光雷达,图17(a)展示了此系统的示意图。系统中具有两个FPA,如图17(b)所示:第一个用作发射器,它顺序照亮场景;第二个用作接收器,检测来自场景的散射光,与照明区域相对应的所有接收器像素同时并行读出。接收器阵列一共由32pixel×16pixel组成,多路复用的读出电路集成到了阵列中,最大限度地减少了外部电器连接,同时保持信号的完整性。光的片上转向由发射器和接收器芯片上的热光开关树提供,由于仅照亮对应于正在读出的像素的场景部分,不会浪费照明光。发射器和接收器芯片使用硅光子学工艺制造,将光子器件与90nmSOI电子器件单片集成,图17(c)对芯片的光学显微图像进行了展示。激光雷达系统的光源来自IQ调制器调制的外部激光器,发射孔径处的功率为4mW,线性调频带宽为4GHz。对于85%反射率的目标,该系统在17m处实现了1.8mm的测量精度,对于具有30%反射率的目标,在75m的距离上实现了3.1mm的精度。此外,它对17m处目标的检测概率为97%,对75m处目标的检测概率为42%,并且对慢速运动物体的速度测量精度为1.0mm/s。
LABS技术可以实现快速随机扫描,它最突出的优点在于只需要对二进制开关进行控制,控制简单,制造成本低。此外,它的天线布置灵活,允许更大的像素密度,还可以实现二维转向。由于开关和光束角度的对应关系,为了获得高分辨率图像,开关的数量也要尽第60卷第16期/2023年8月/激光与光电子学进展可能地增加,同时也需考虑透镜像差带来的光束畸变问题。当光束转向步长角太大时,位于两束光之间的小目标会被遗漏,使系统存在盲区。
4.4 慢光光栅激光雷达
慢光光栅(SLG)以自由空间光束的形式发射导模,通过改变波长或波导折射率进行控制。2022年日本横滨国立大学将SLG与Ge光电二极管相结合,在芯片上构建了基于零差探测的FMCW激光雷达系统,系统外观如图18所示。该芯片尺寸为9.1mm×5.5mm,采用CMOS工艺在直径为200mm的SOI平台上制造。芯片上包括有模斑转换器、Ge平衡光电探测器、热光MZ开关、SLG、热光加热器和零差检测电路等。其中,SLG结构具有约60%的向上发射效率和约100dB/m的辐射系数。台式可调谐激光源经IQ调制器进行单边带调制,产生的锯齿波调制光经过掺铒光纤放大器和带通滤波器放大后输入芯片。对于3~5m距离处覆盖有反光膜的目标物,出射的光束在5.1°×2.8°范围内扫描,获得了154×32的点云图像。在之后的研究中,该团队使用协方差矩阵自适应进化策略算法对SLG结构中孔的位置和直径以及衍射光栅的位置和角度进行了优化,将向上发射率提高到了80%以上,并将光束发散度降低到0.08°以下。
由于慢光效应,SLG的光束角相比通常的波导光栅对波长和折射率更加敏感。与OPA和FPA相比,SLG减轻了光学天线的大规模集成和相位校准的负担,同时通过固定激光波长的热光效应可以实现大范围和高分辨率的光束扫描。不足的是,由于该技术利用了热光效应,结构边缘的温度不均匀性会干扰光束角度,加热的效率也会制约扫描速率,且整个系统可能需要引入额外的温控系统以控制外界温度的干扰。此外,该技术对刻蚀均匀性的要求也较高。由于研究尚处于起步阶段,该技术的光学损耗和噪声较大,检测距离有限,其实用性还需进一步的研究来证明。
4.5 其他激光雷达
当激光雷达只有固定角度的测距需求时,系统因为无需光束转向机构而可以大大简化。例如法国泰雷兹集团展示的基于硅光子平台的FMCW激光雷达,如图19所示。除了DFB激光模块和输出环行器外,系统完全在9mm2芯片上实现。系统具有8个发射通道和8个接收通道,这些通道使用级联的MZ开关网络和一个波形校准通道依次寻址,激光经过每个发射端的准直器后覆盖所需的角度,避免了光束扫描过程。该激光雷达实现了对60m处移动目标的检测,并允许仅用5mW的光功率对8m处的目标进行扫描,但该方案只能实现不同角度的测距,无法对目标物成像。
与LABS技术类似,这种结构可以实现快速随机扫描,并且结构灵活,制造成本低,同时也存在盲区问题。此外,该结构对输出端环形器和准直器的需求使得系统连线复杂,没有完全发挥出硅基系统的优势。
5 总结与展望
凭借着精度高、抗干扰能力强等优点,激光雷达成为了车辆感知系统的重要配置,在无人驾驶领域具有广阔的应用前景。面对车载激光雷达极具潜力的商用市场,传统扫描型激光雷达在成本和可靠性等方面难以突破现有的瓶颈,而固态激光雷达却有着强大的发展潜力,MobileEYE、AEVA和速腾聚创等国内外厂商纷纷投入产品研发或布局相关产业。
历经多年发展,硅基光电子技术无论在材料、设备或是加工制造、封装测试等各个方面都积累了大量成熟的技术,是激光雷达理想的集成平台。本综述立足于硅基片上激光雷达固态扫描方案,重点介绍了flash、OPA、LABS和SLG这4种技术近5年的研究进展,并对它们的技术特点进行了总结。就未来的市场应用而言,flash激光雷达结构简单,发展较成熟,目前已有LeddarTechPixell等产品出现,但因为探测距离及精度有限,主要用于低速和精度要求较低的应用场景,还难以作为汽车的主雷达使用。OPA体积紧凑,扫描速度快,具有低成本量产的可行性,也很适合与FPA或衍射光栅结合而实现二维光束转向,是当前的研究主流。虽然目前的产业链仍不成熟,实际产品制造存在较大的技术难点,短期内难以实现量产,但Quanergy的S系列产品也已经在推进产品化进程。相比之下,LABS技术和SLG技术发展较晚,缺少技术累积与实用性证明,目前还停留在研究阶段,距离商品化还有很长的路要走。
对于整个激光雷达系统来说,目前除扫描系统以外,激光源、调制模块、放大器及光电探测器等其余一些组件也已经有了芯片化成果,但分立的芯片器件之间仍需要通过光纤或空间耦合,功耗、体积和稳定性等问题依然存在。但随着研究者们对异构集成平台的开发,可以预见,未来的硅基芯片上将可以集成激光雷达系统中所需的各个有源和无源器件,使激光雷达完全实现芯片化,从而提高系统工作的稳定性,简化制造和安装流程,大大降低其体积和生产成本,最终提升激光雷达在无人驾驶等领域的竞争力。
